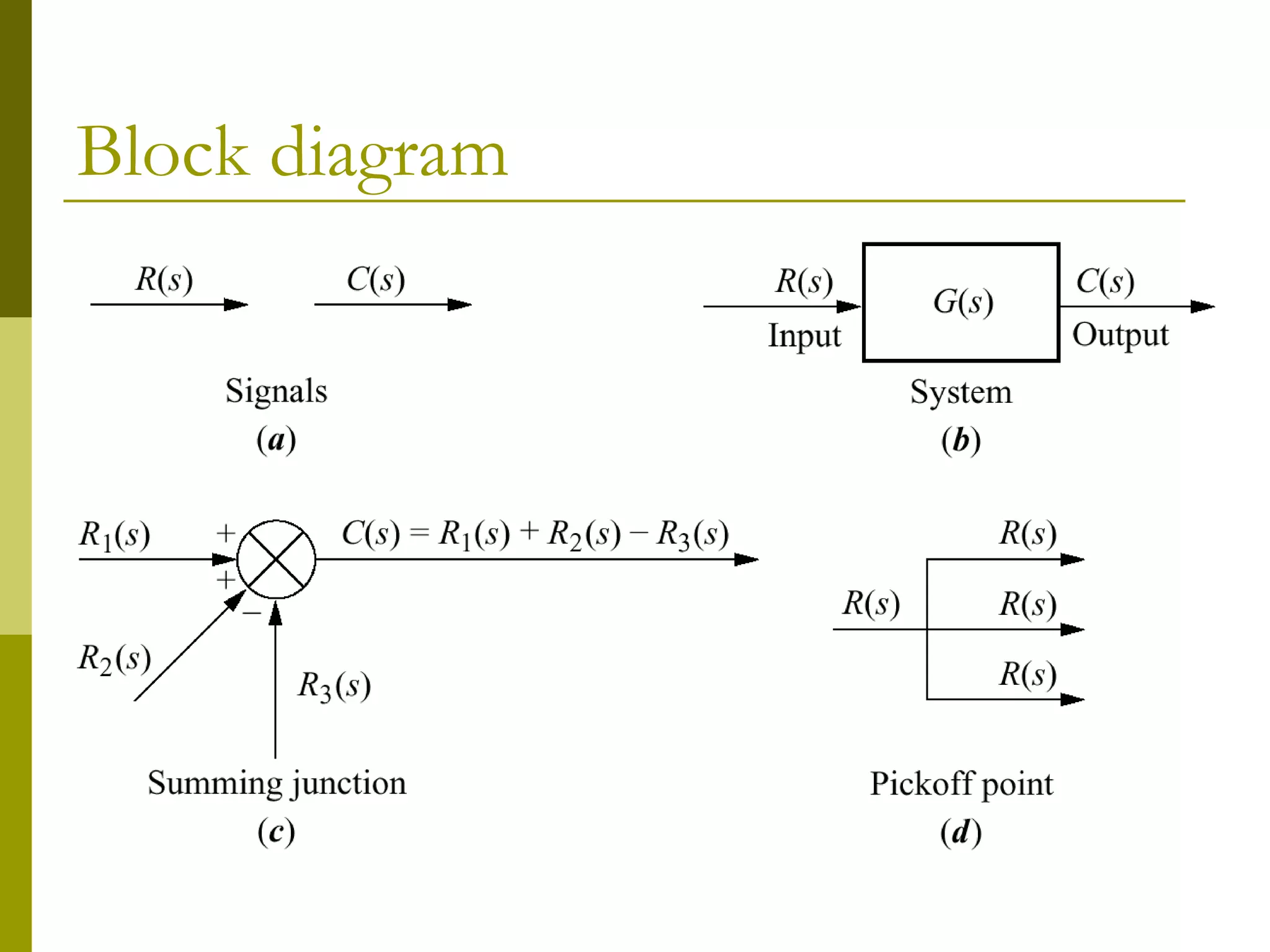
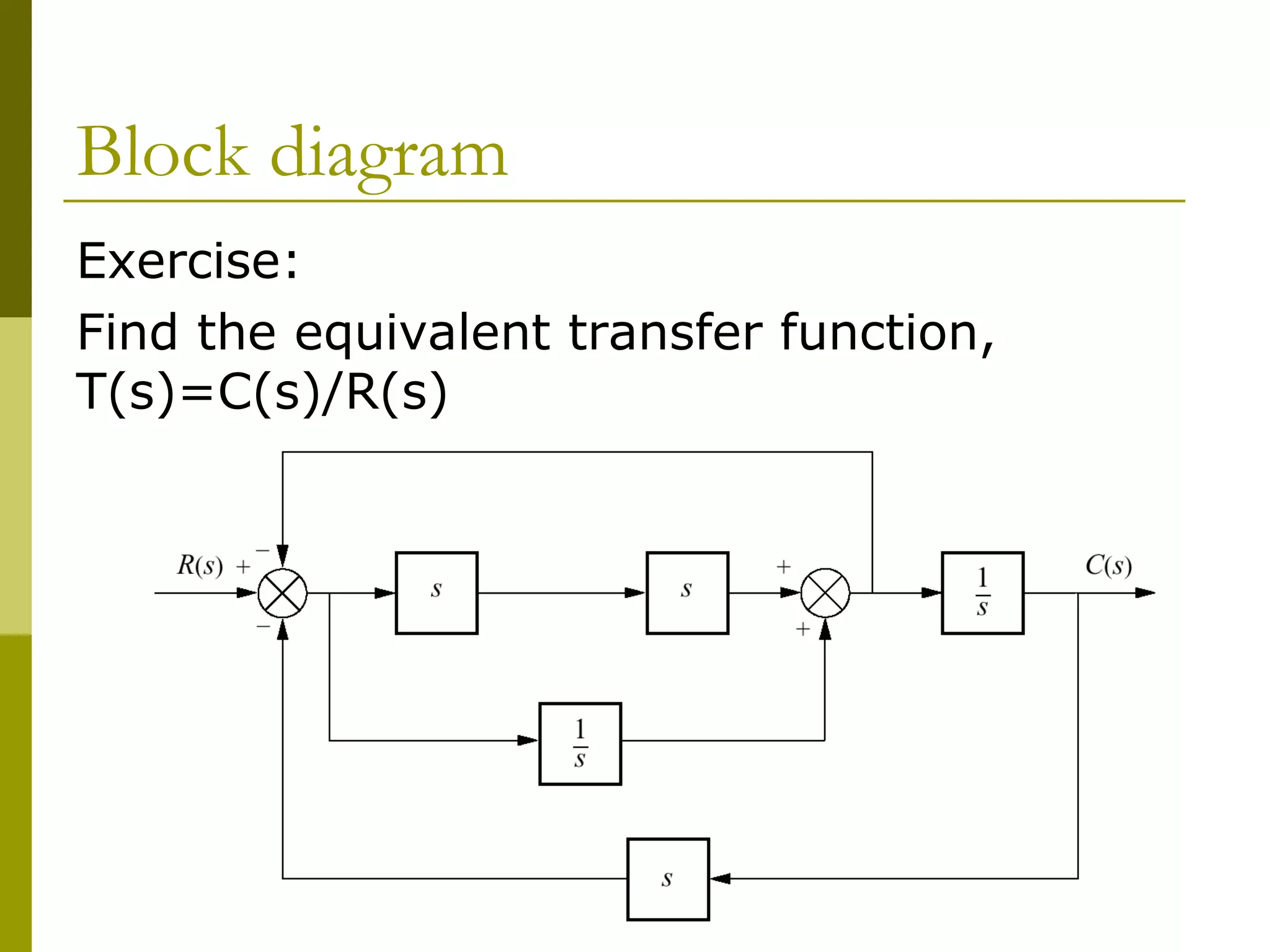
This document provides an overview of techniques for reducing block diagrams and signal flow graphs of multiple interconnected subsystems down to a single transfer function. It introduces common block diagram elements like summing junctions and pickoff points used to represent interconnections. The key methods covered are:
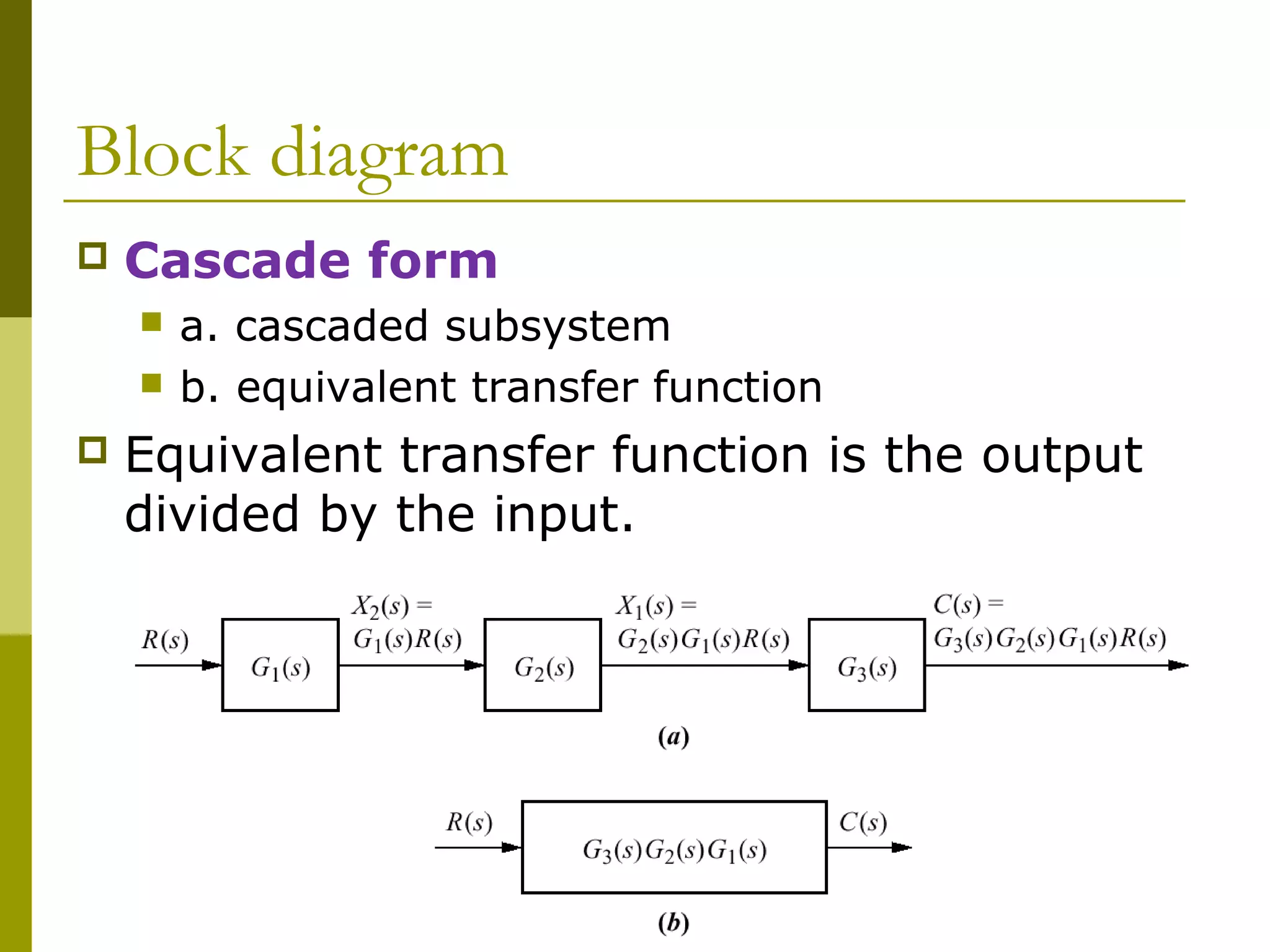
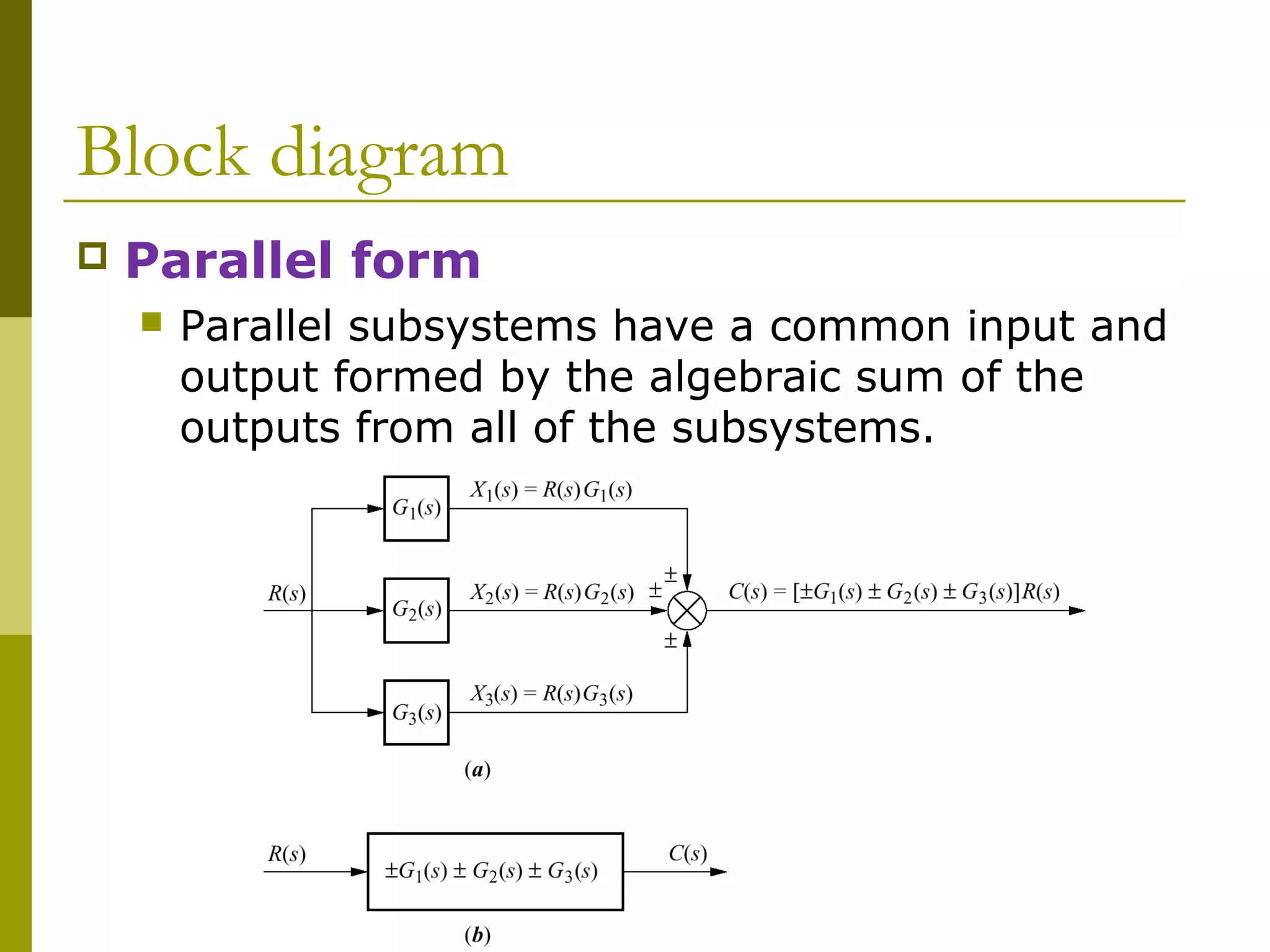
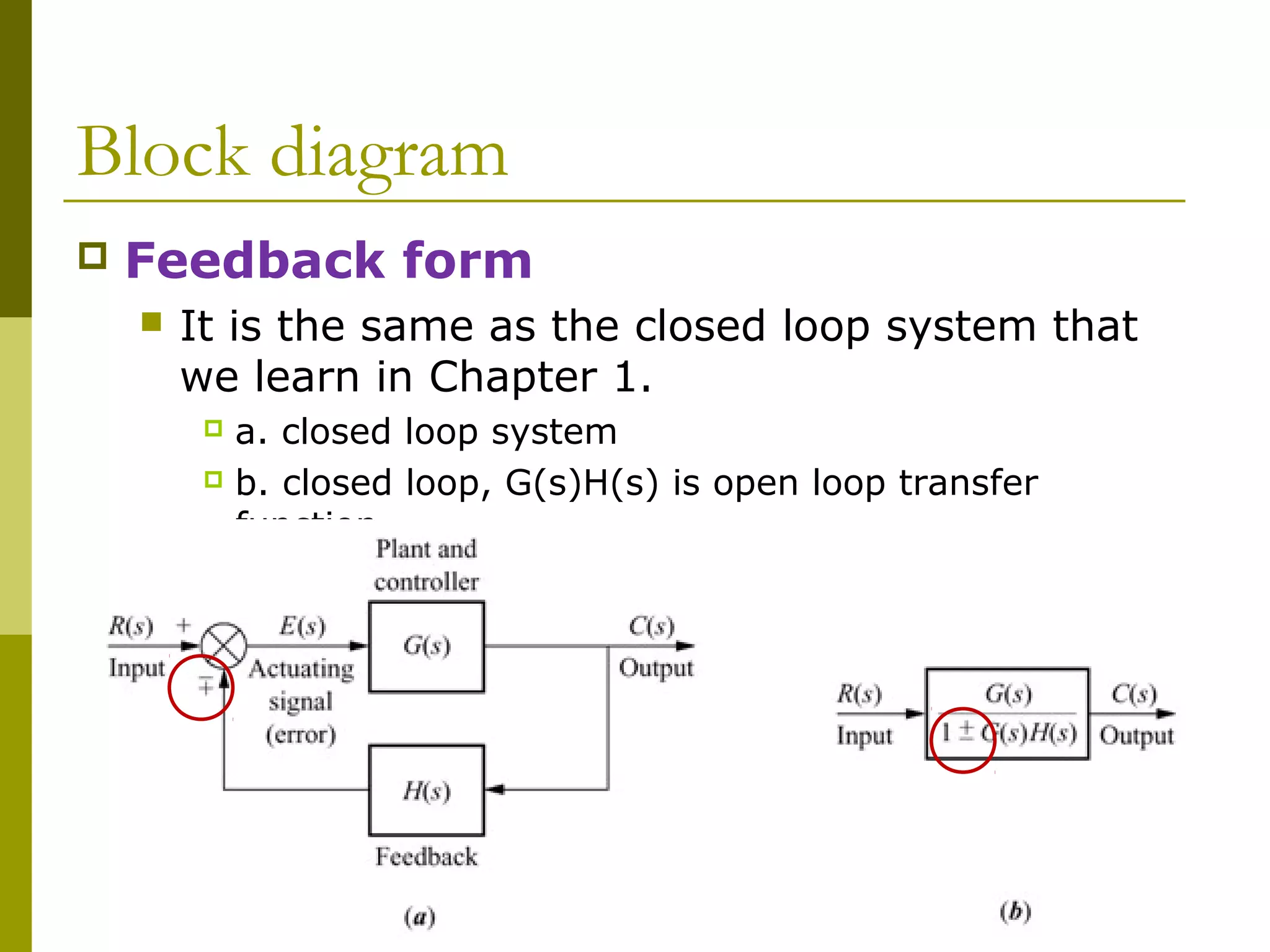
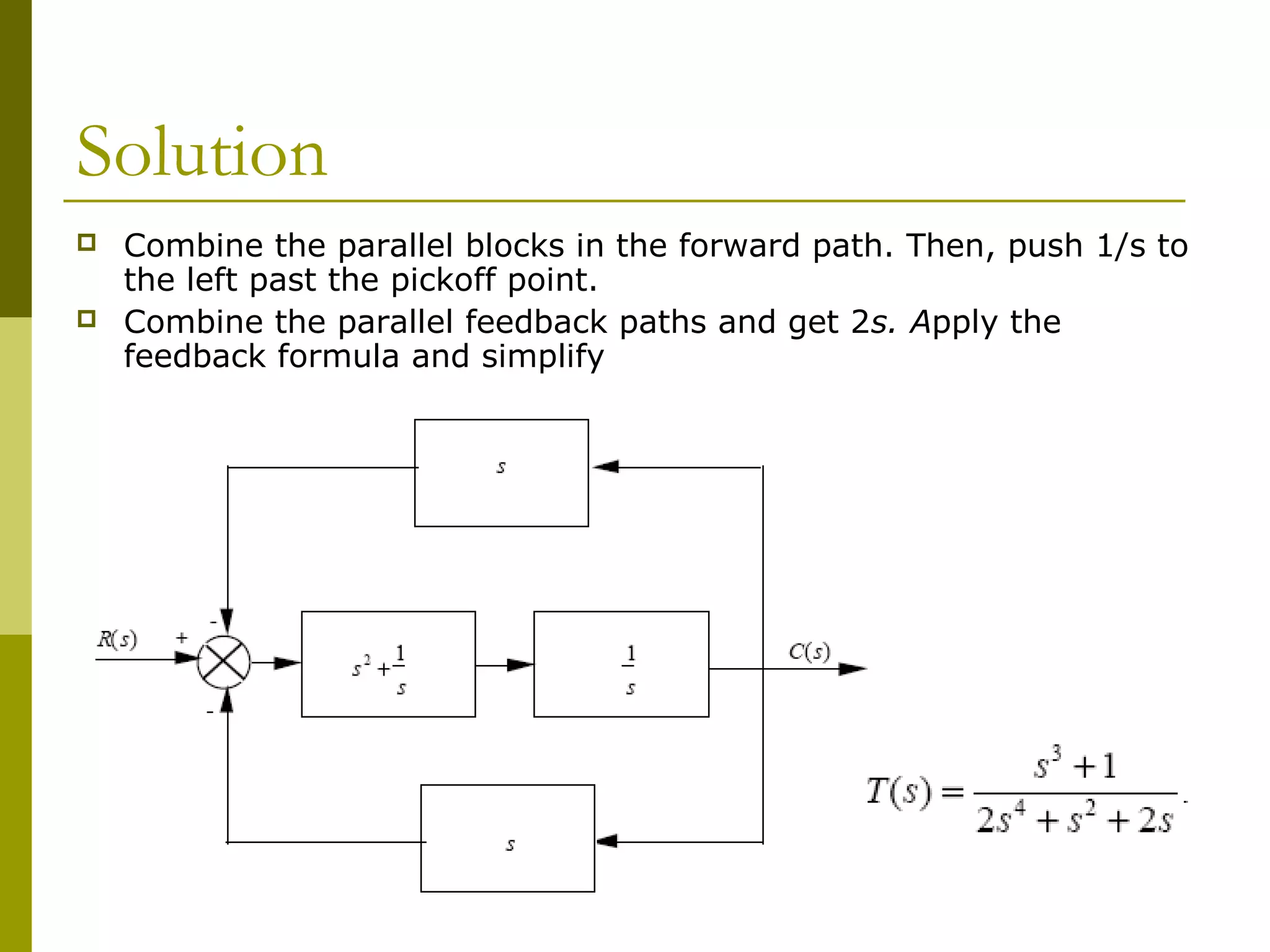
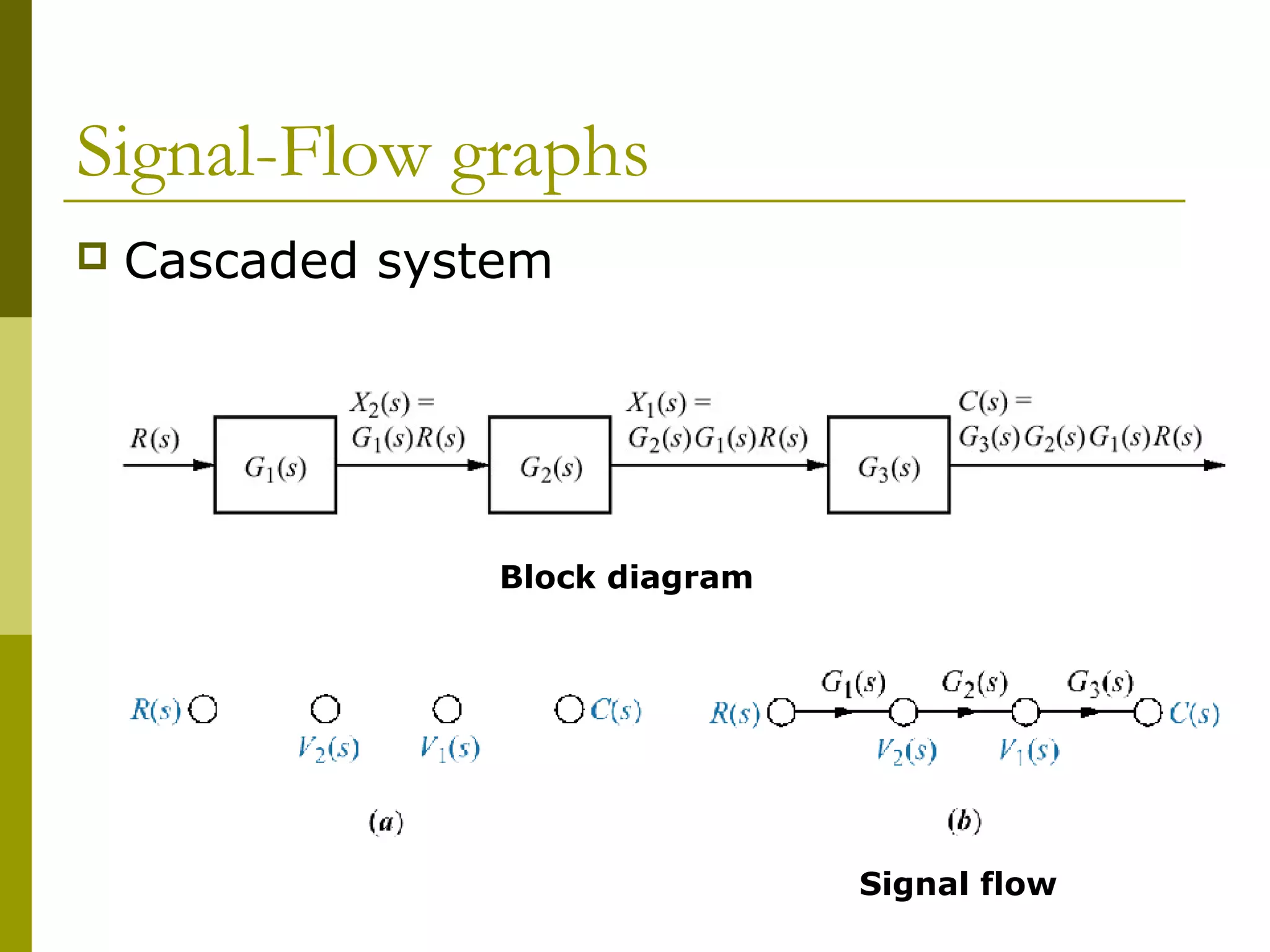
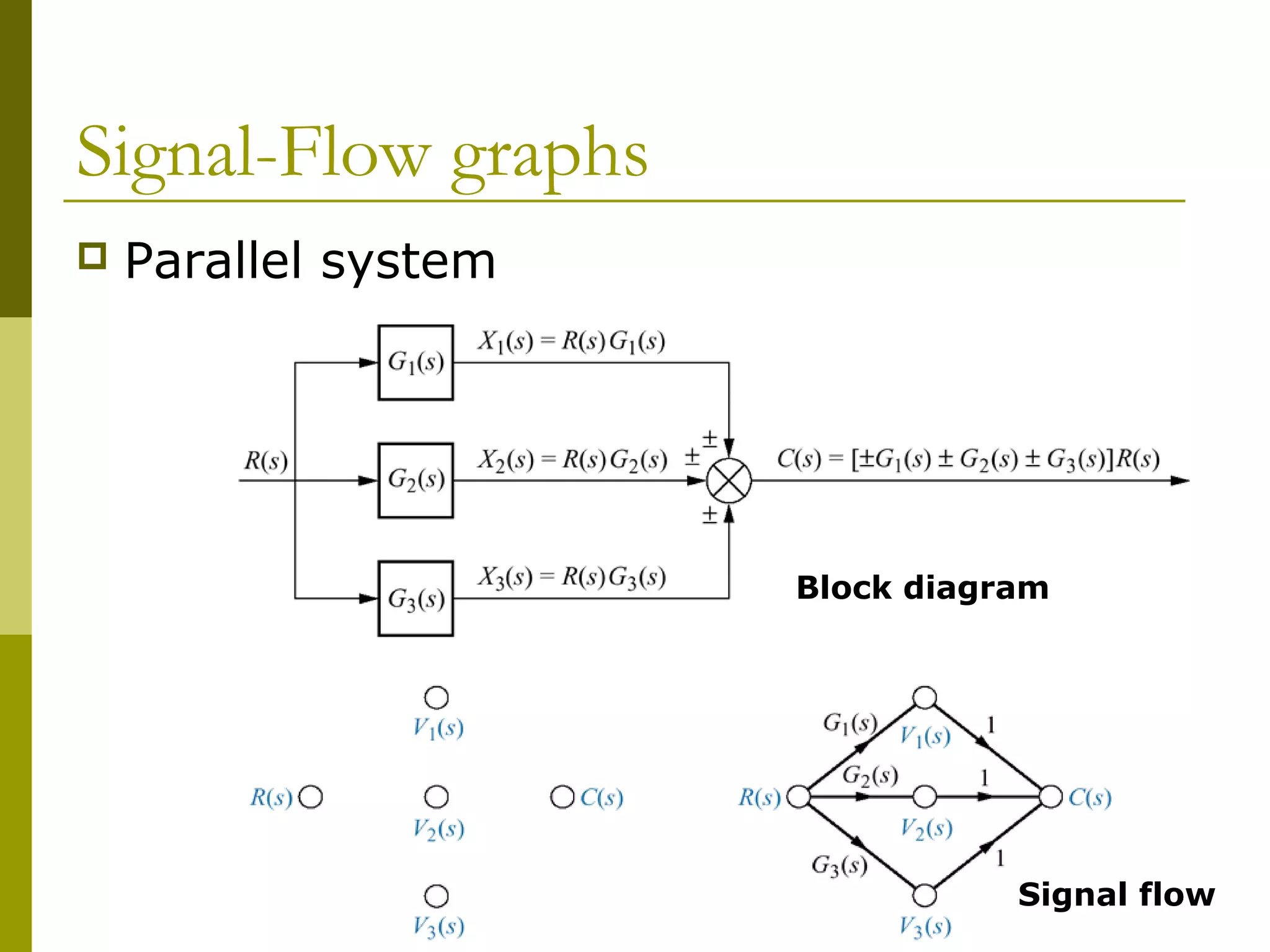
1) Representing systems in cascade, parallel, and feedback forms and deriving their equivalent transfer functions
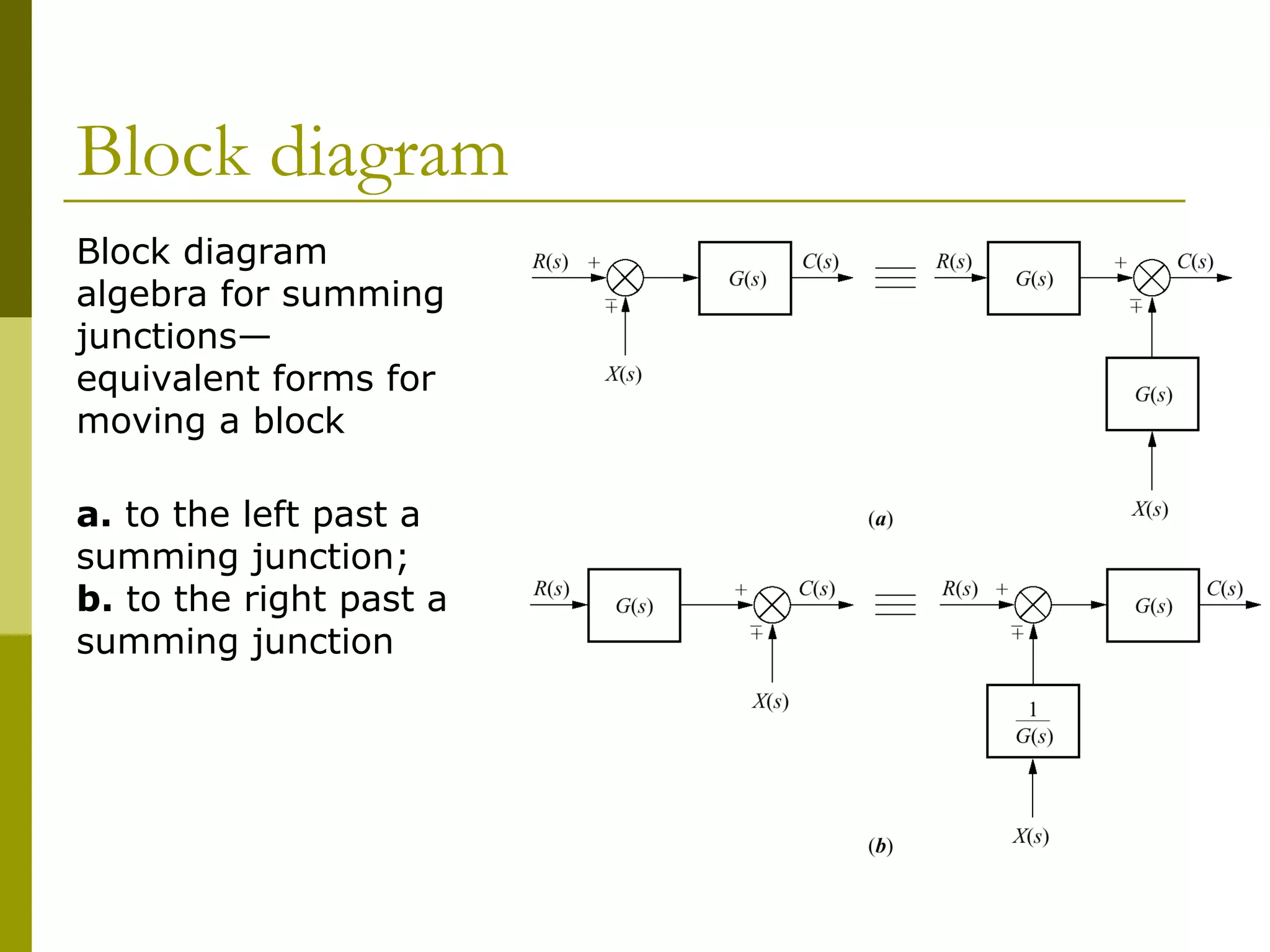
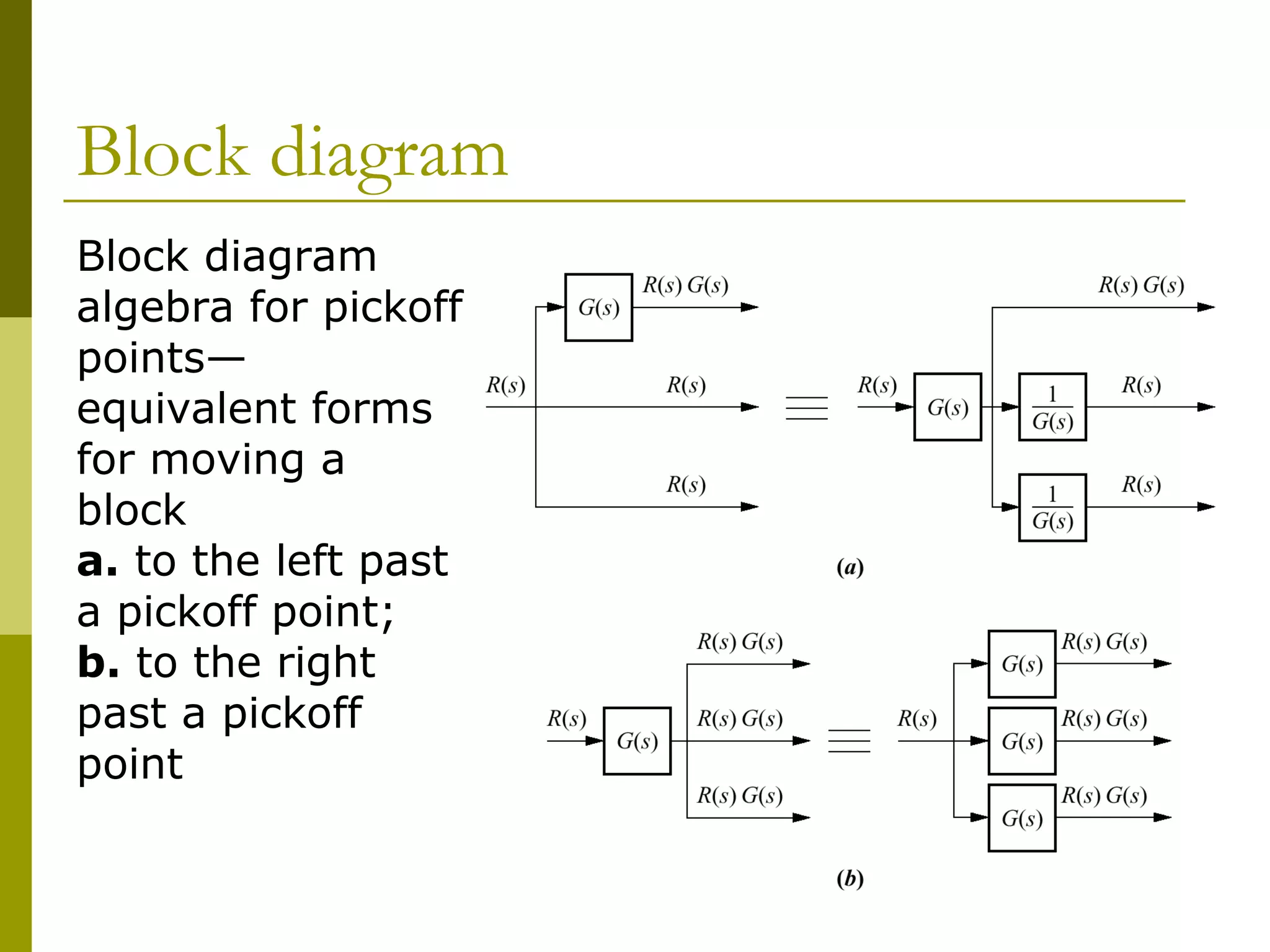
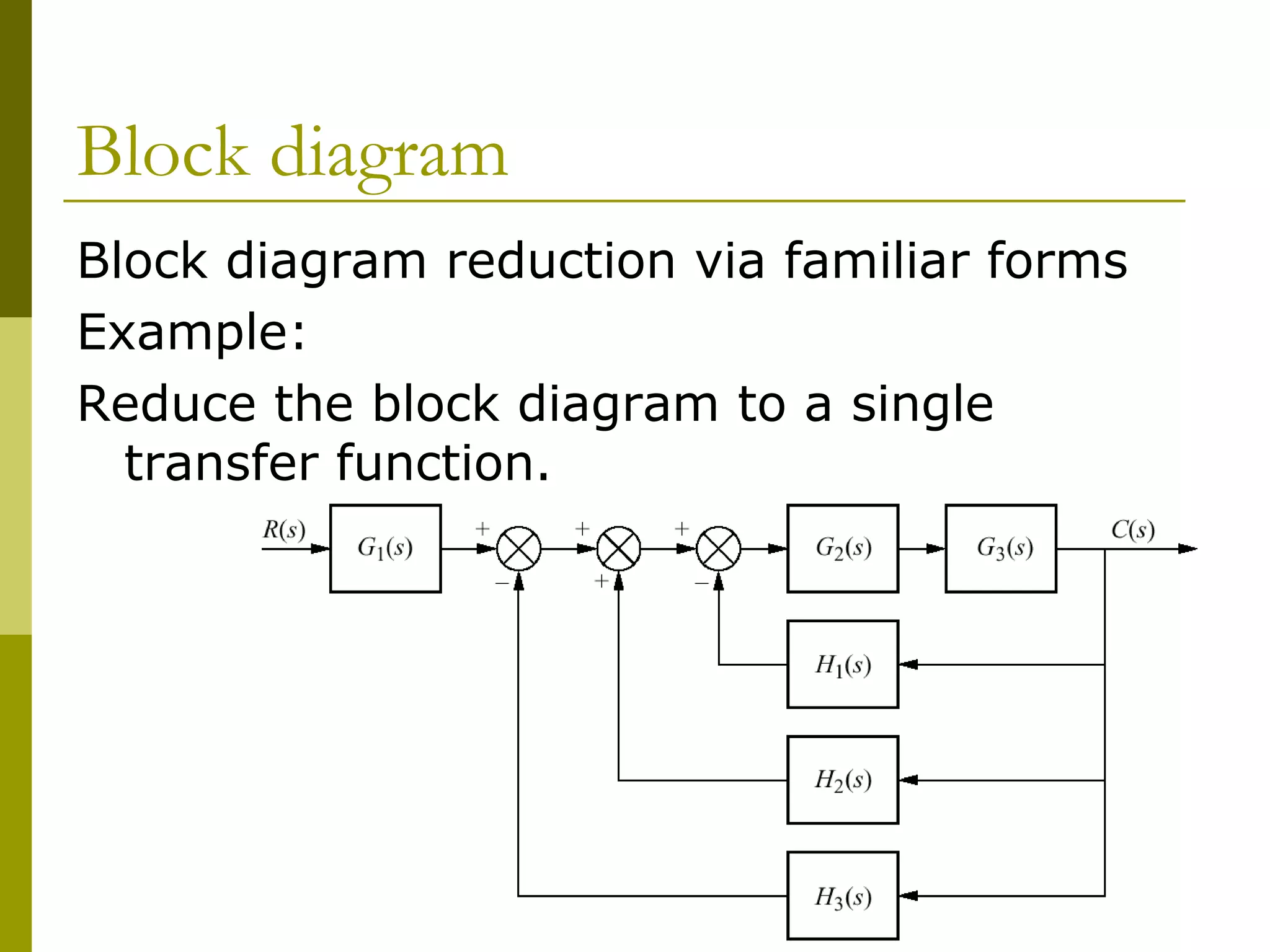
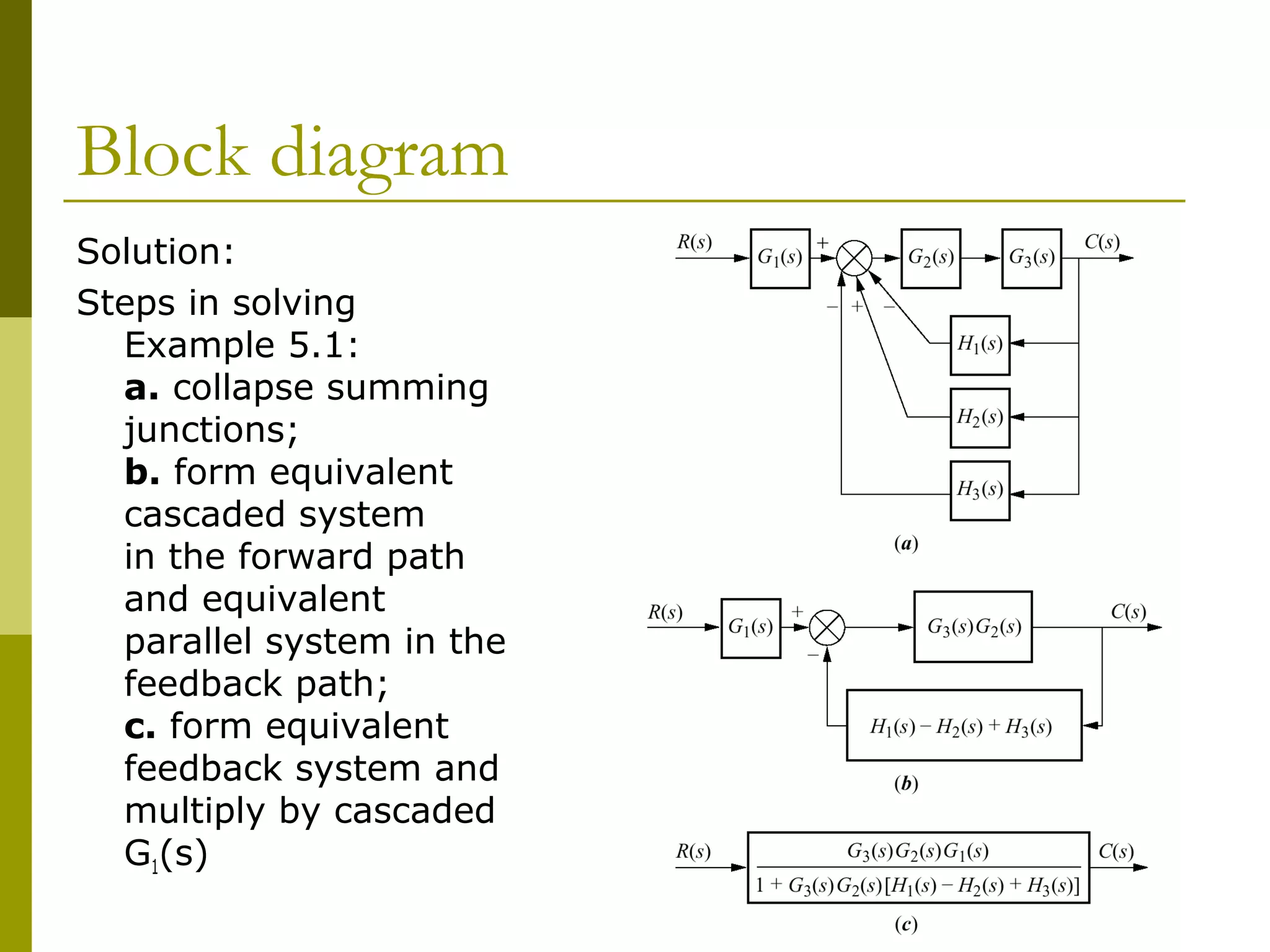
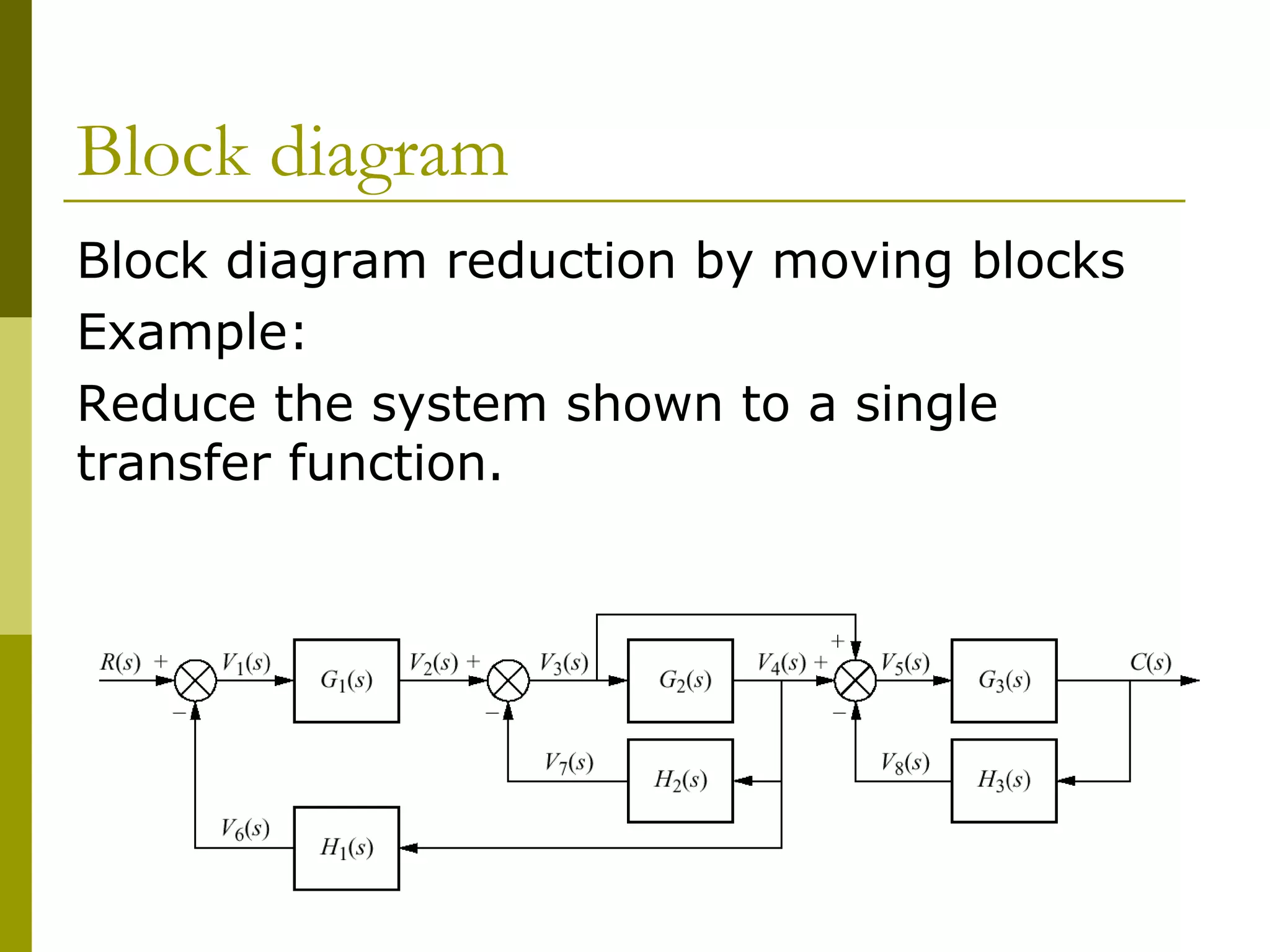
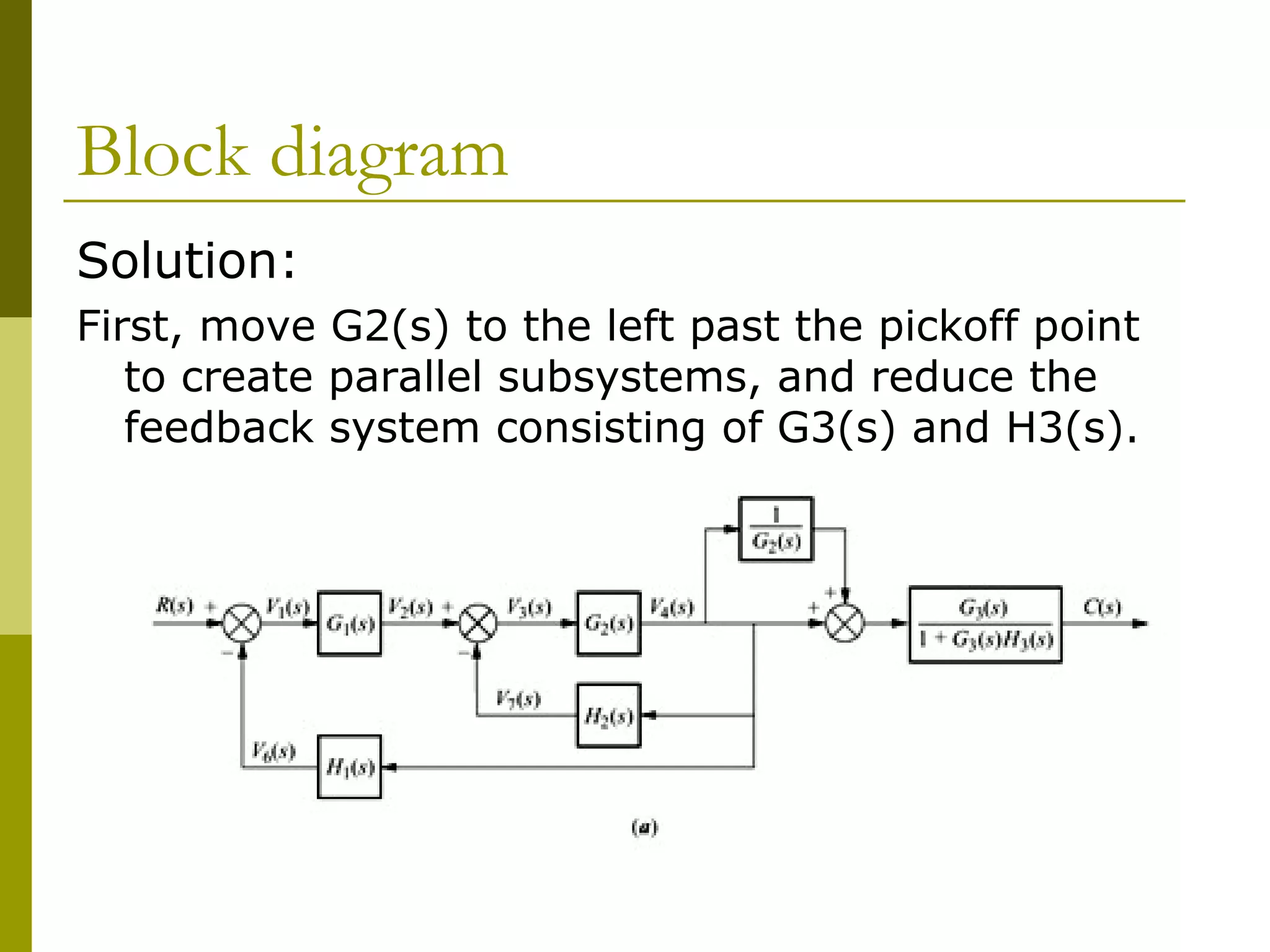
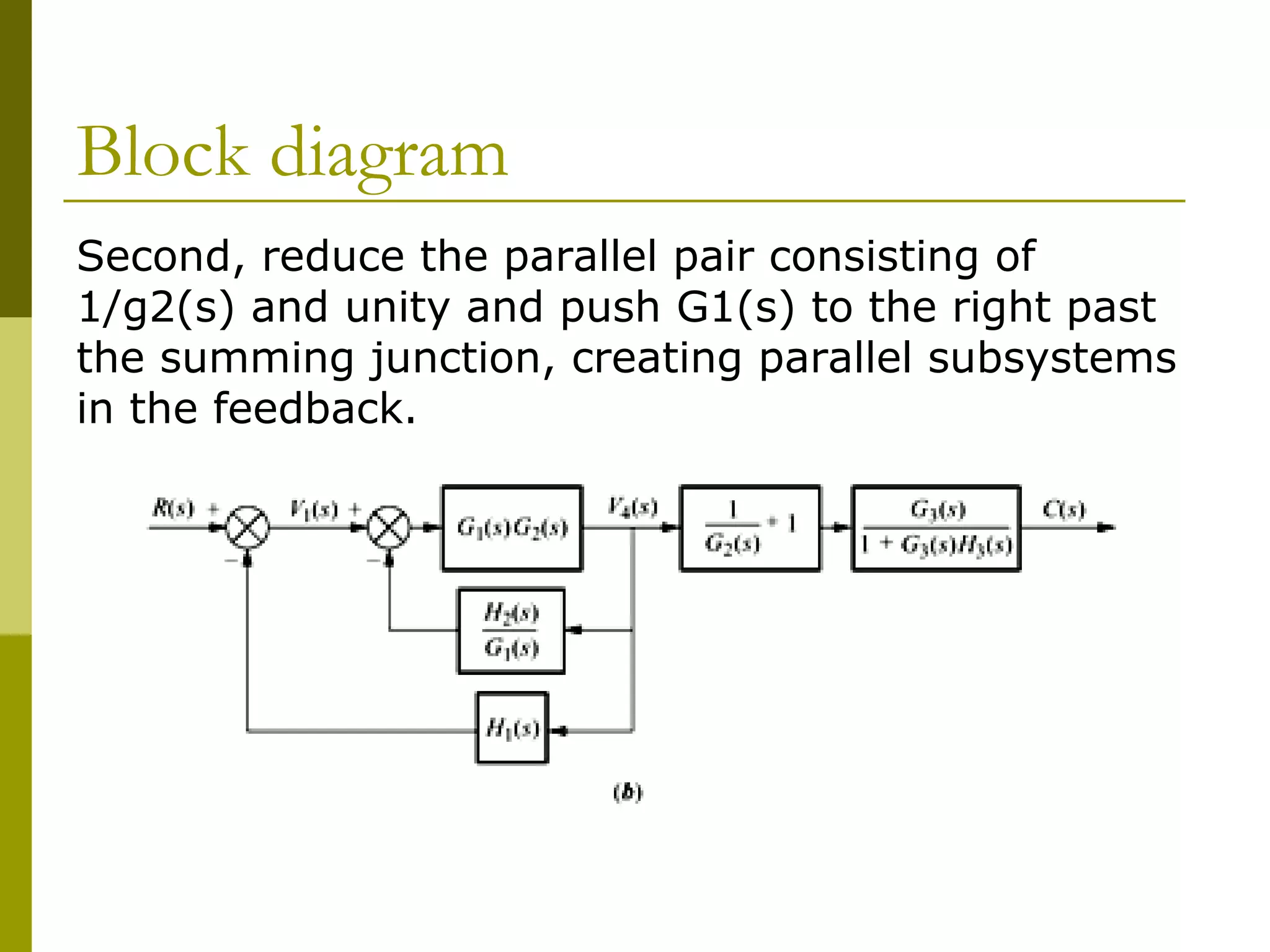
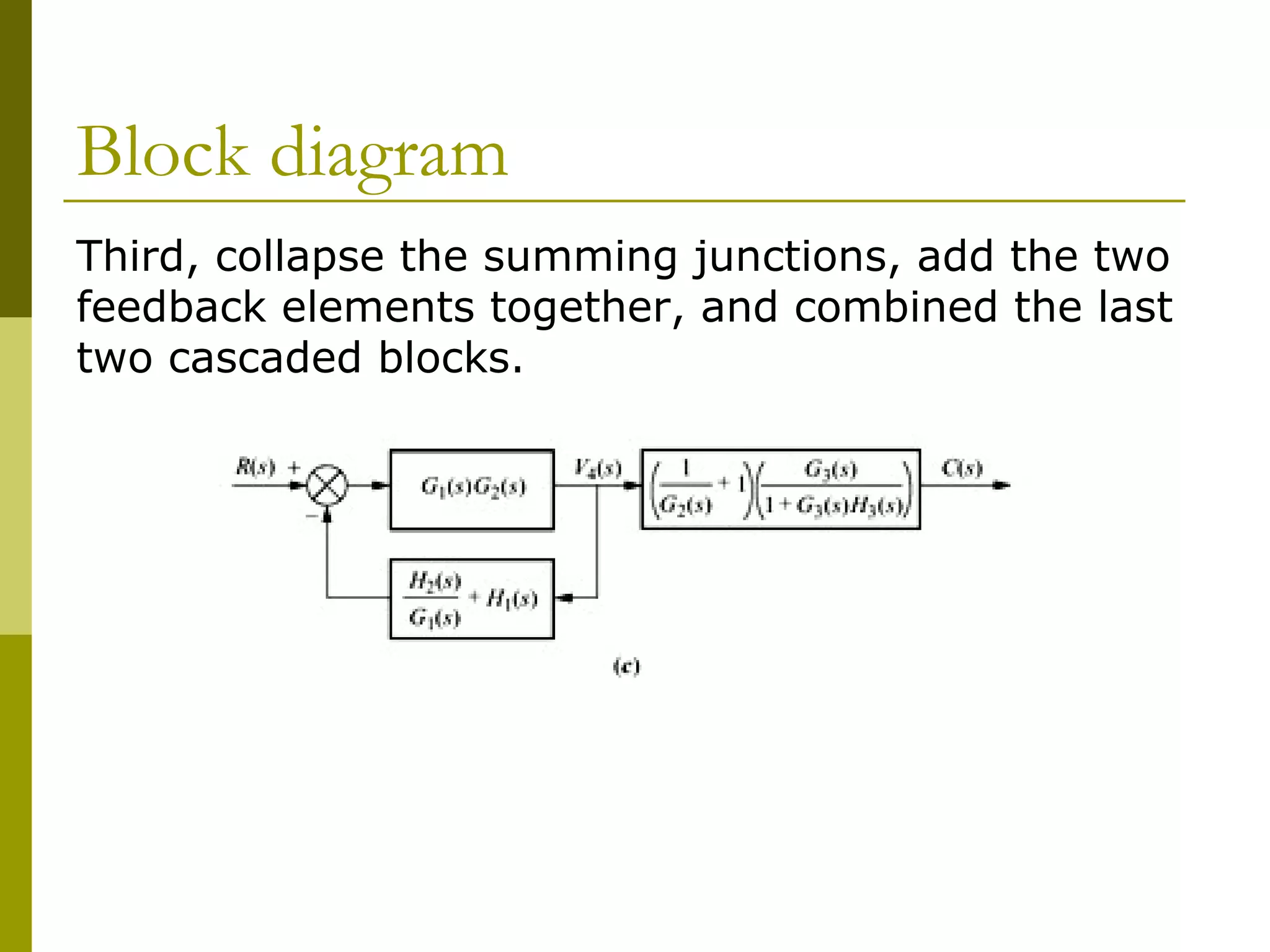
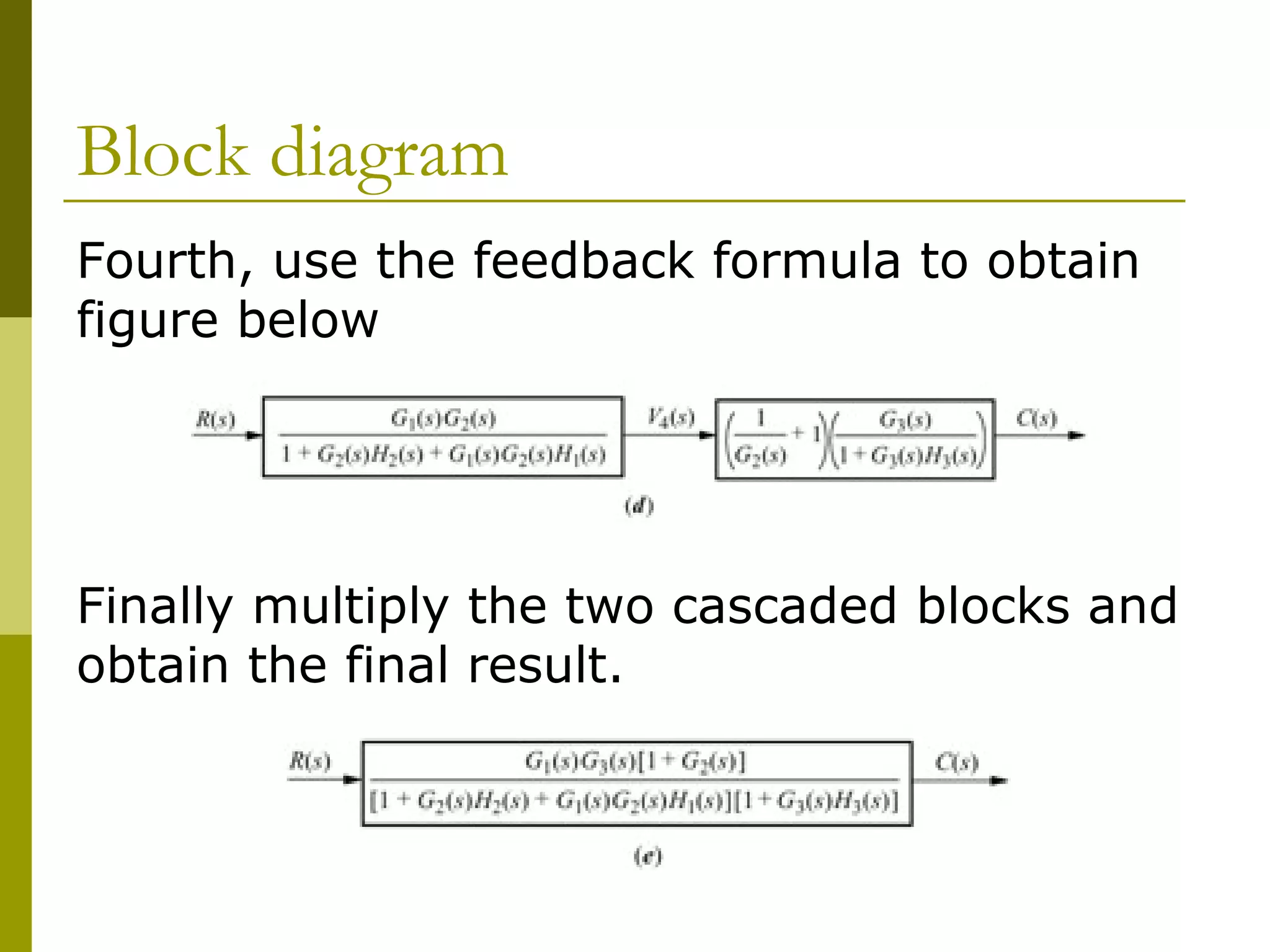
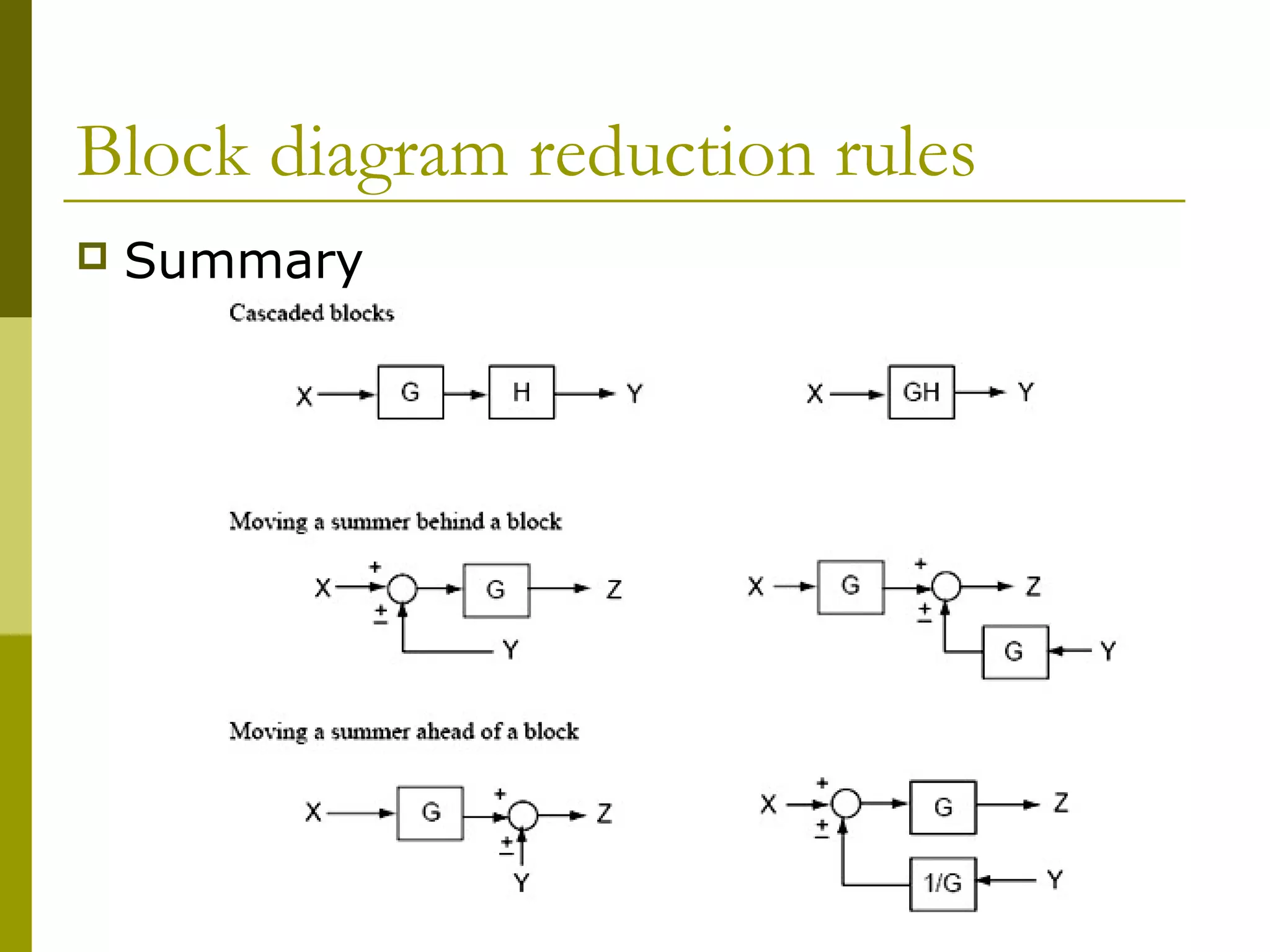
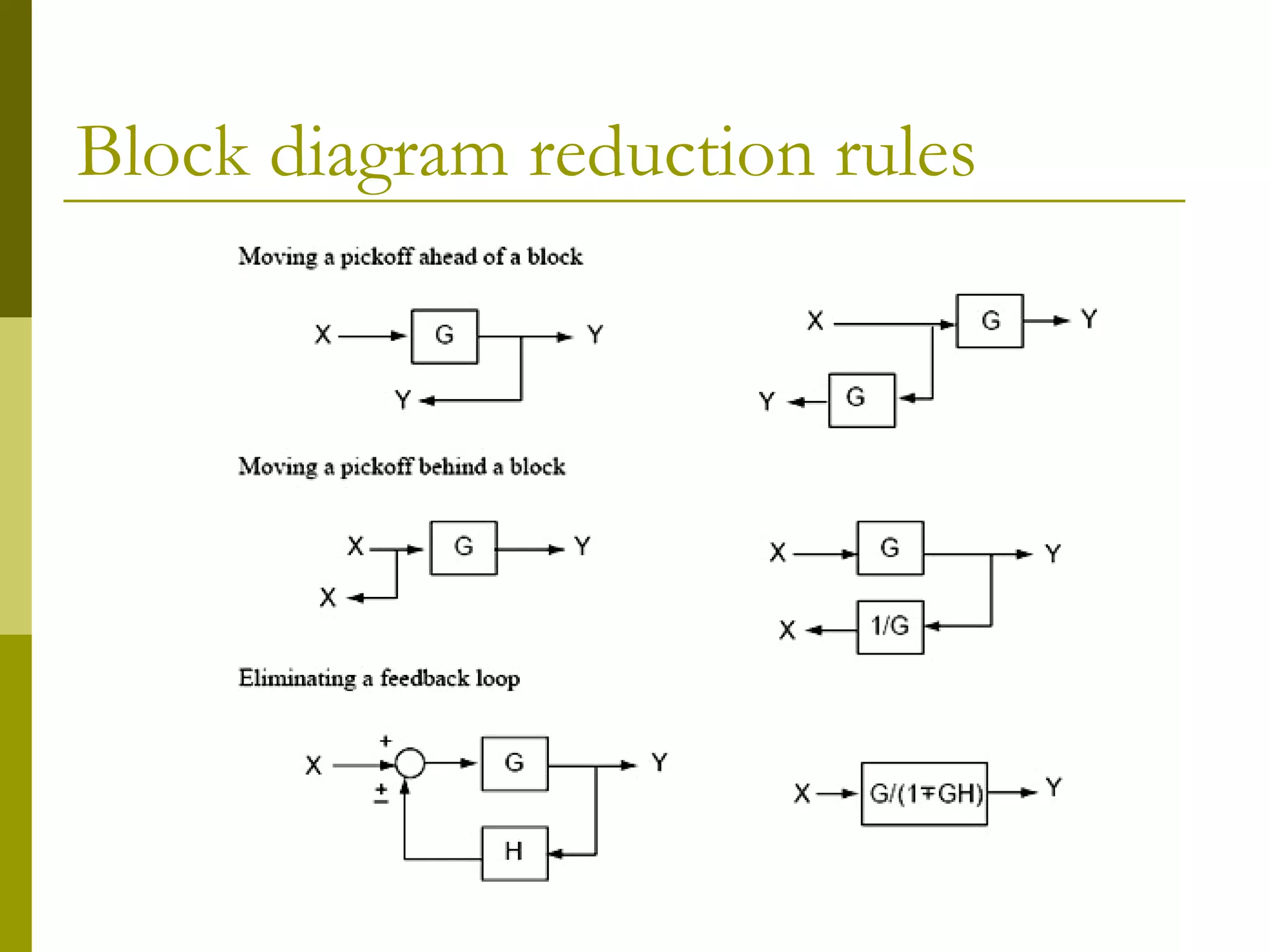
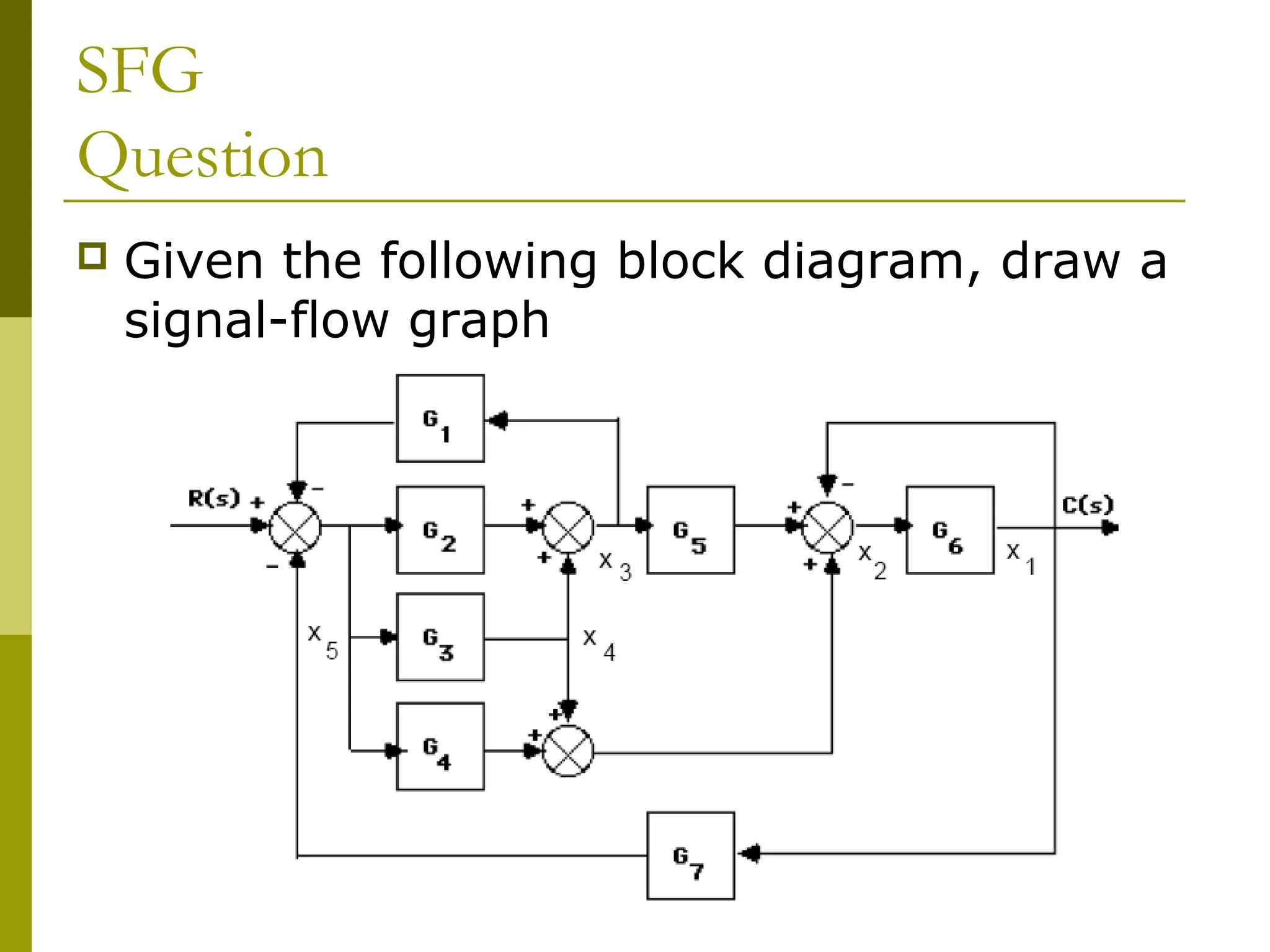
2) Applying algebraic rules to move blocks around diagrams and form familiar topologies
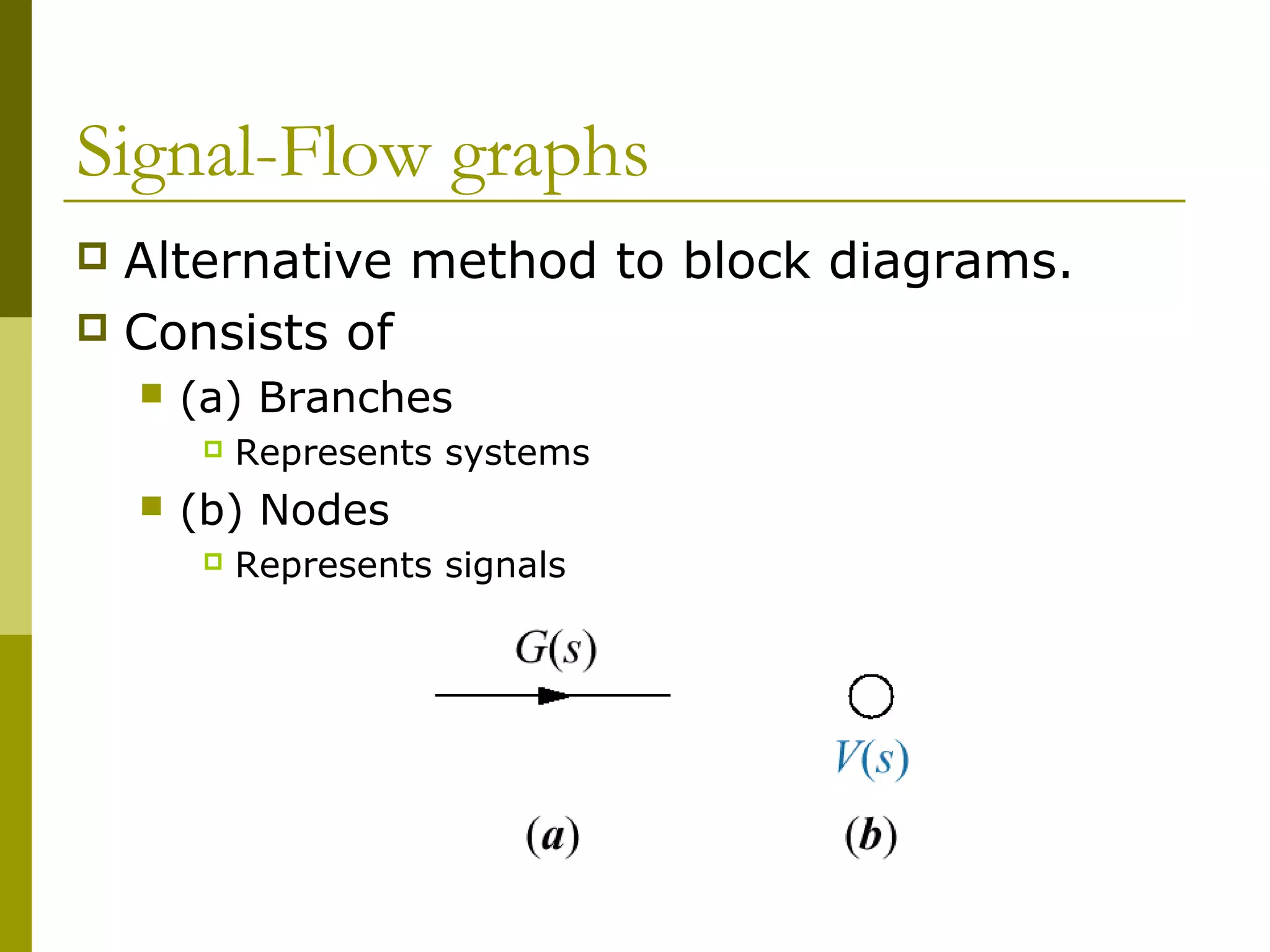
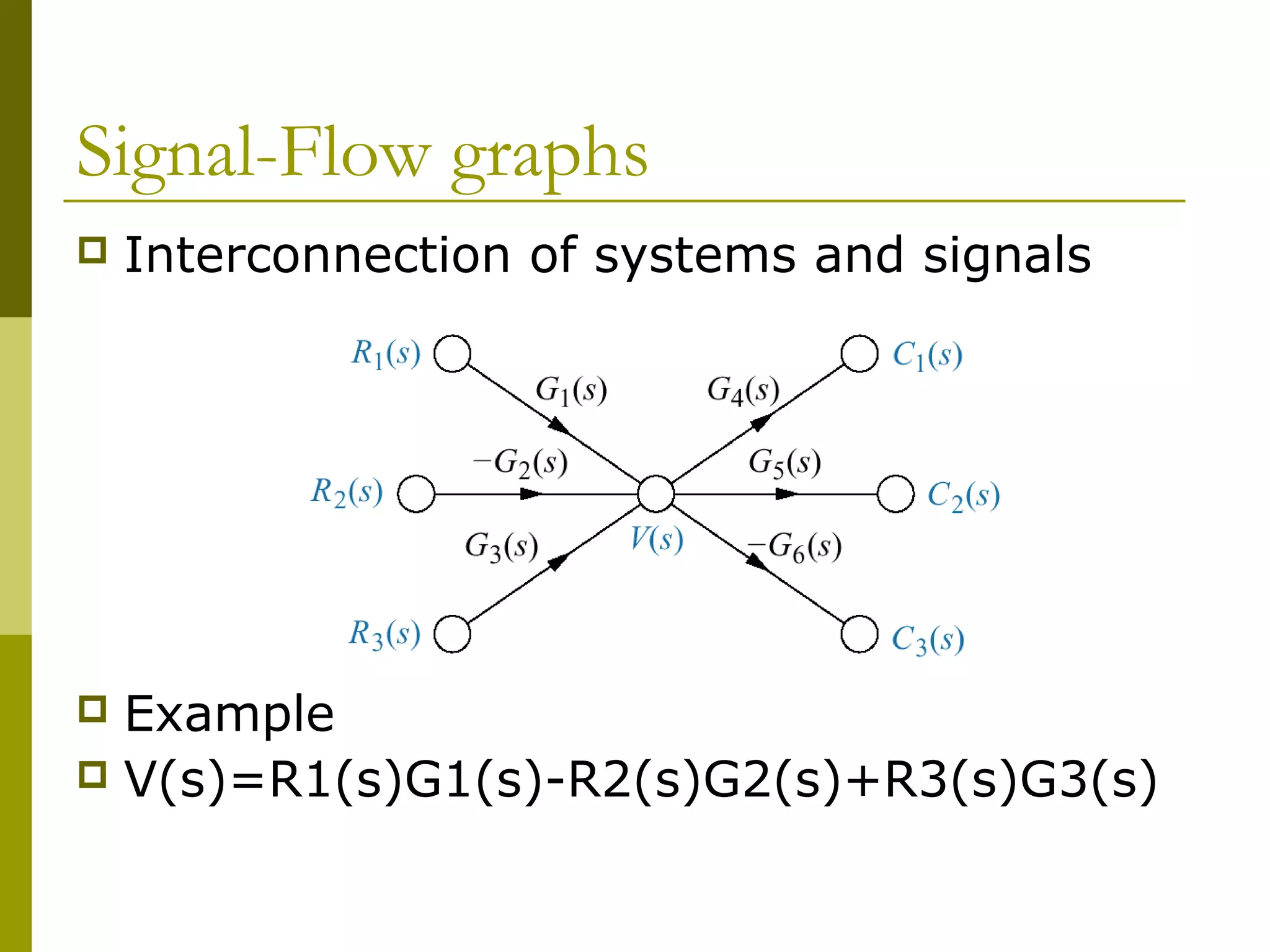
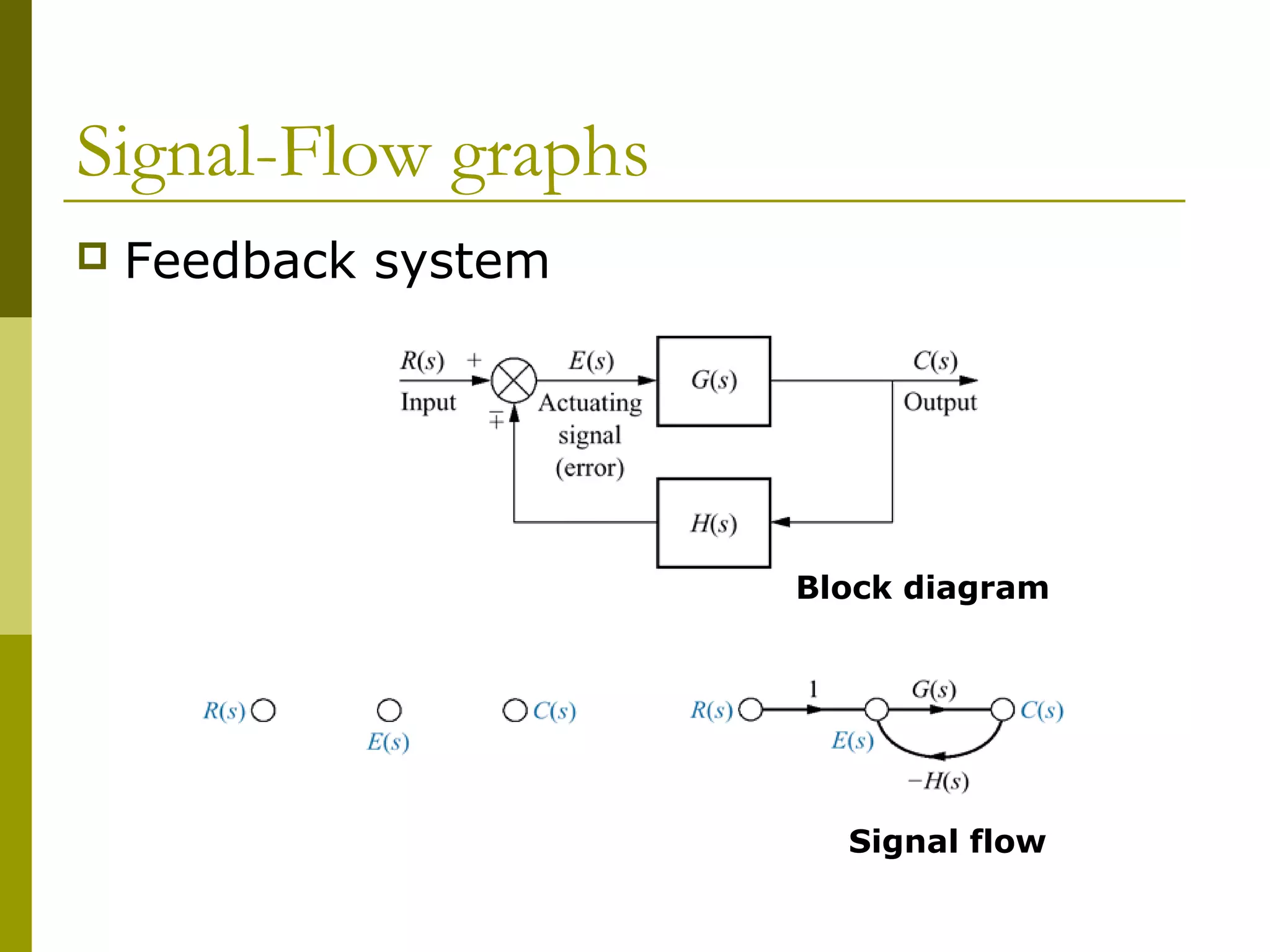
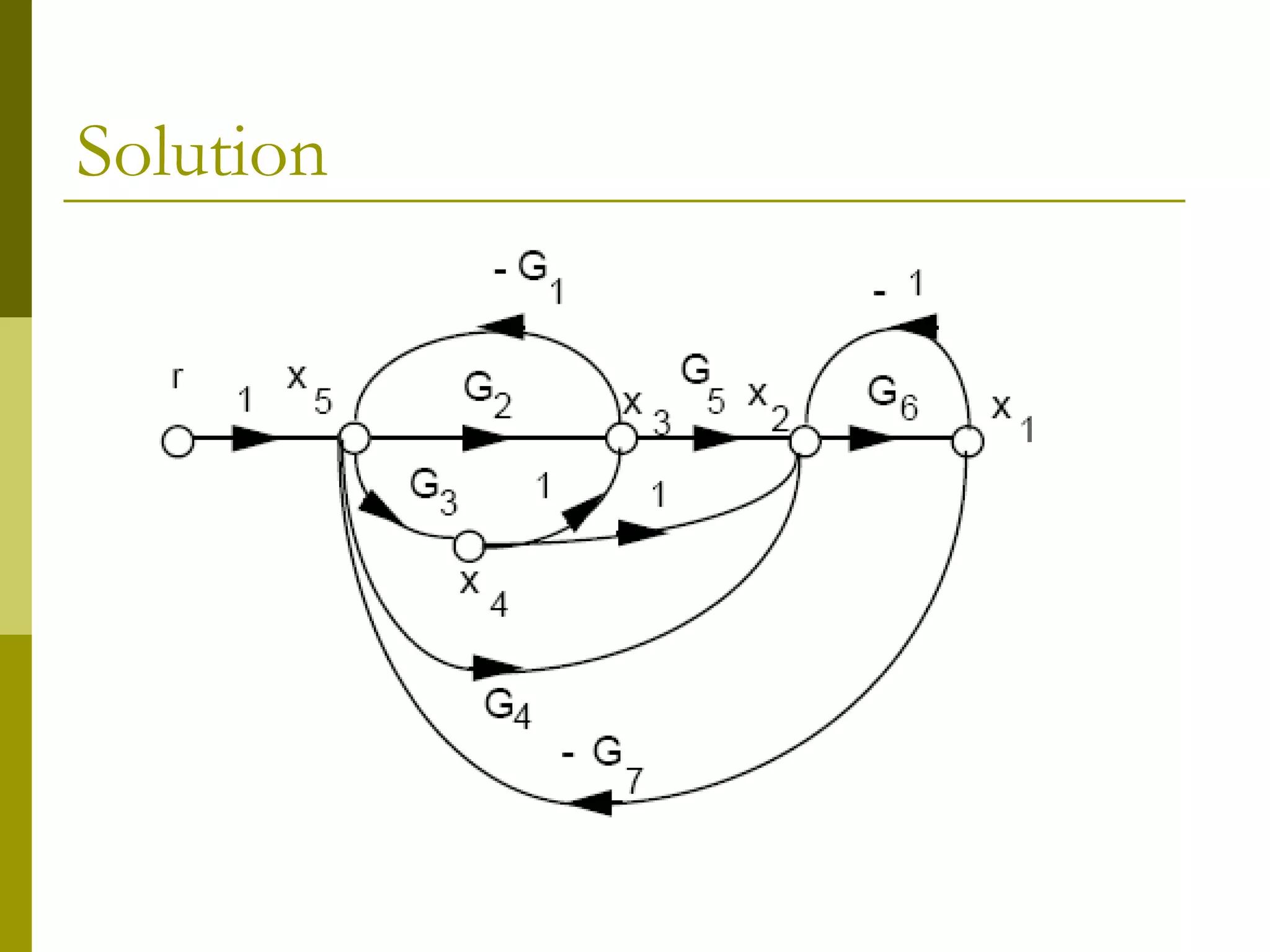
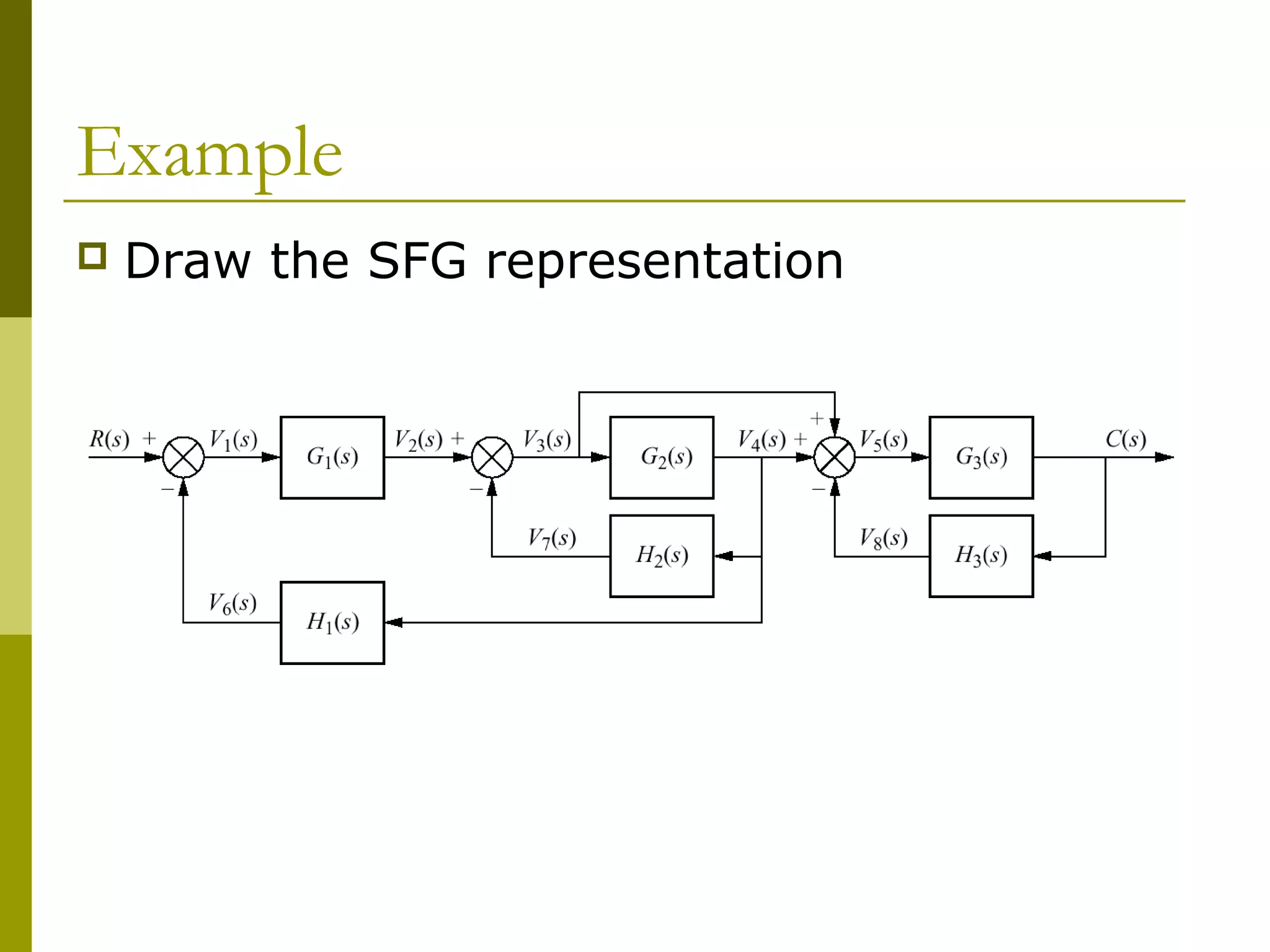
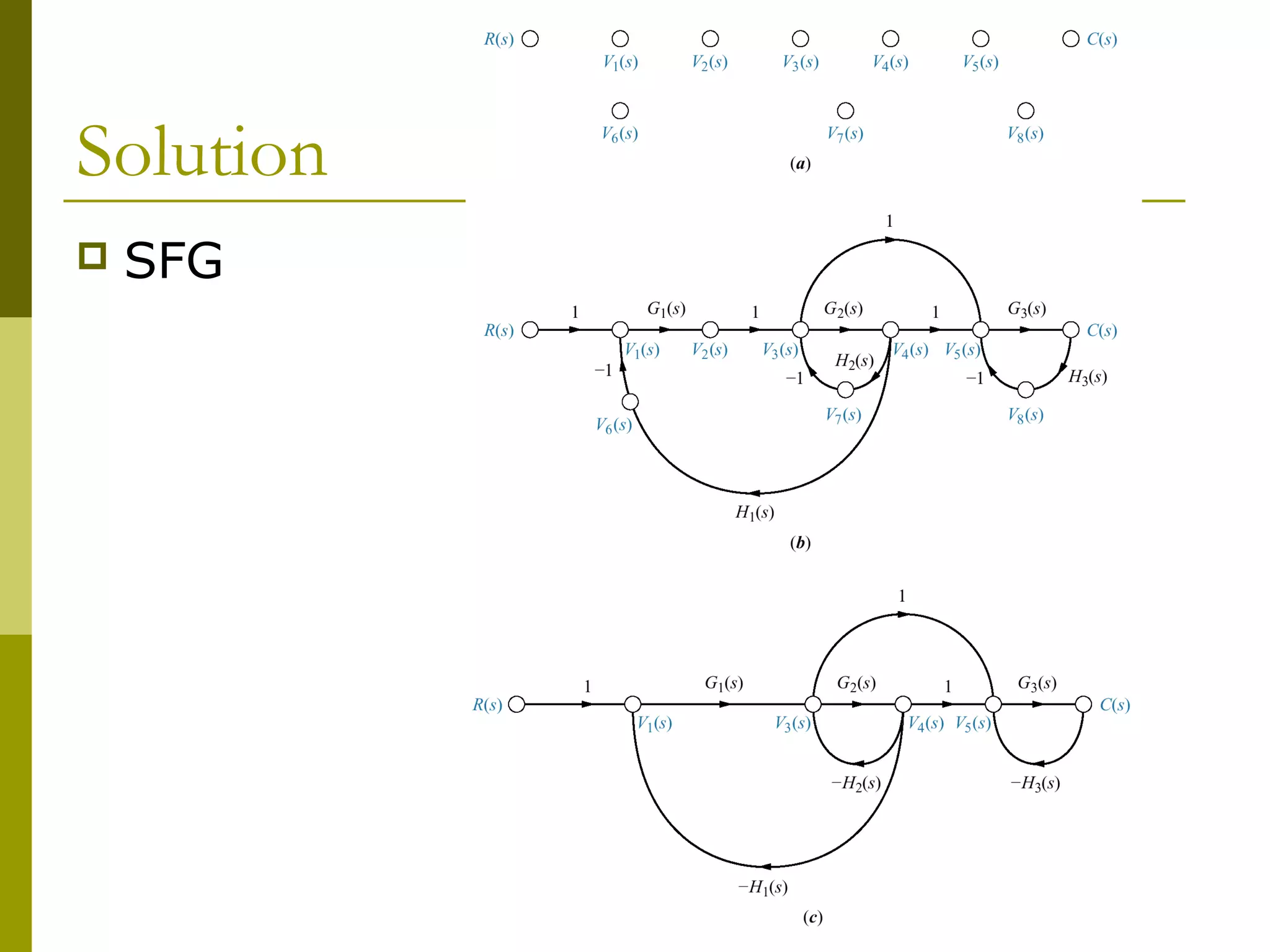
3) Introducing signal flow graphs as an alternative representation
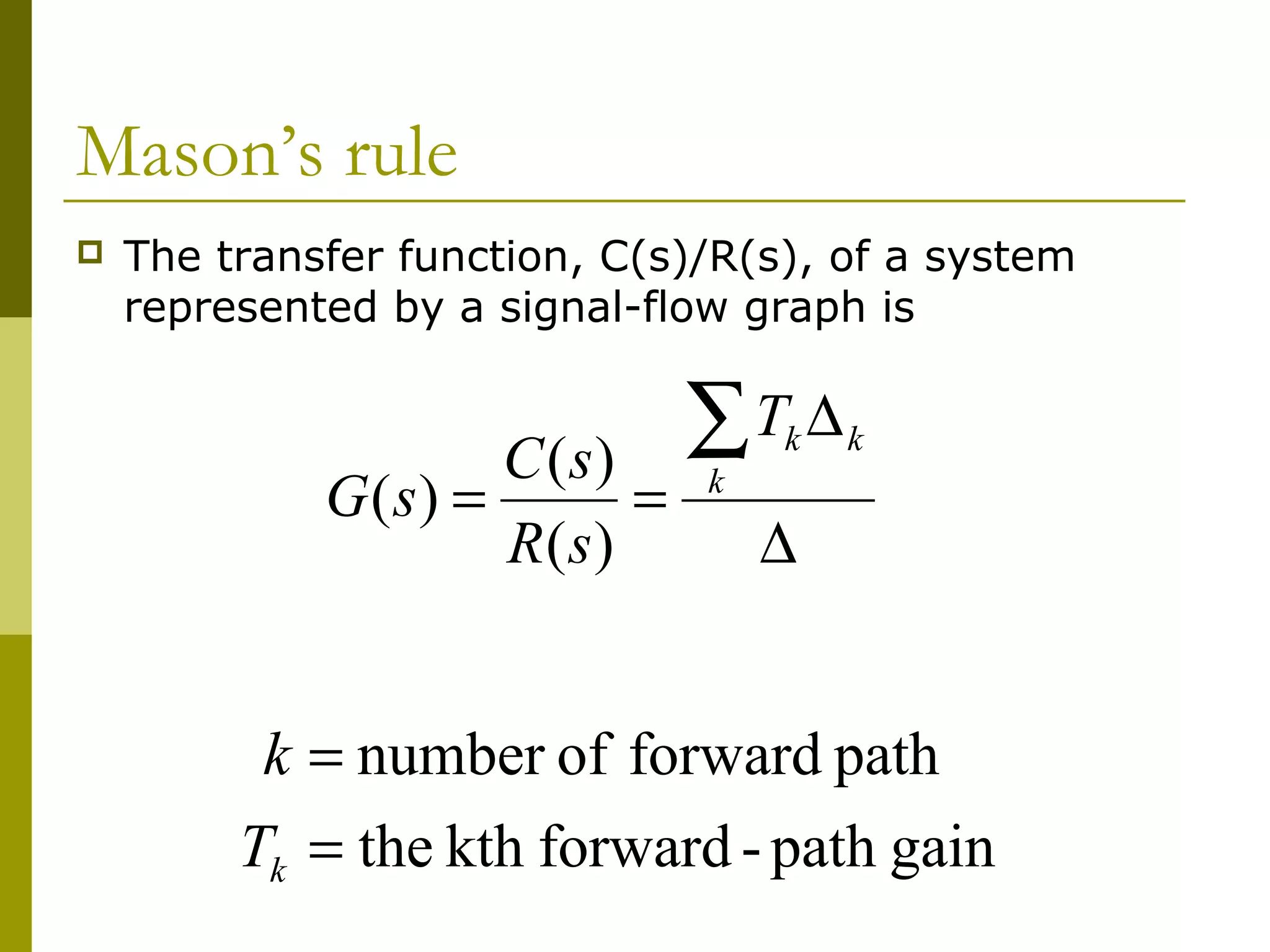
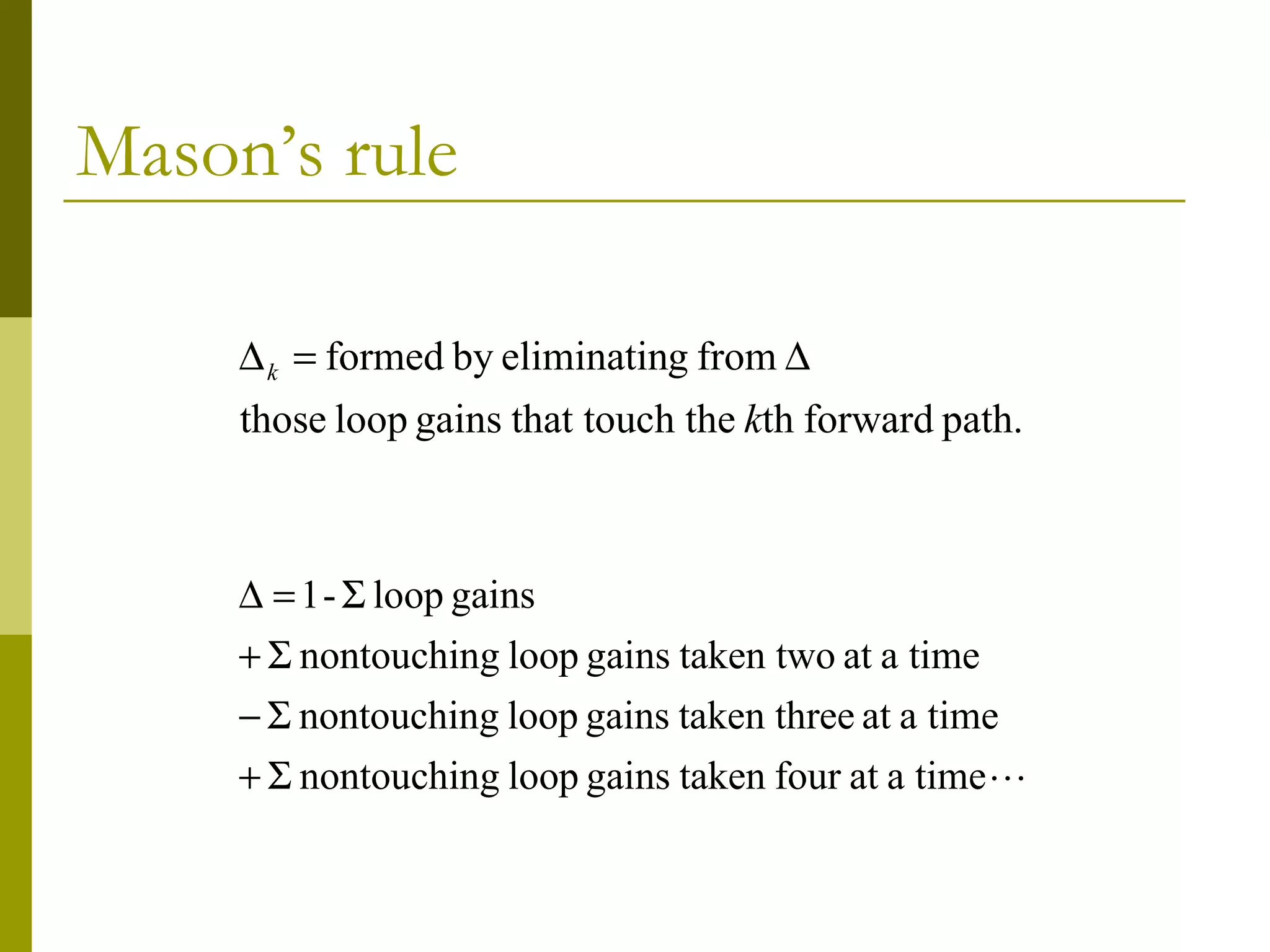
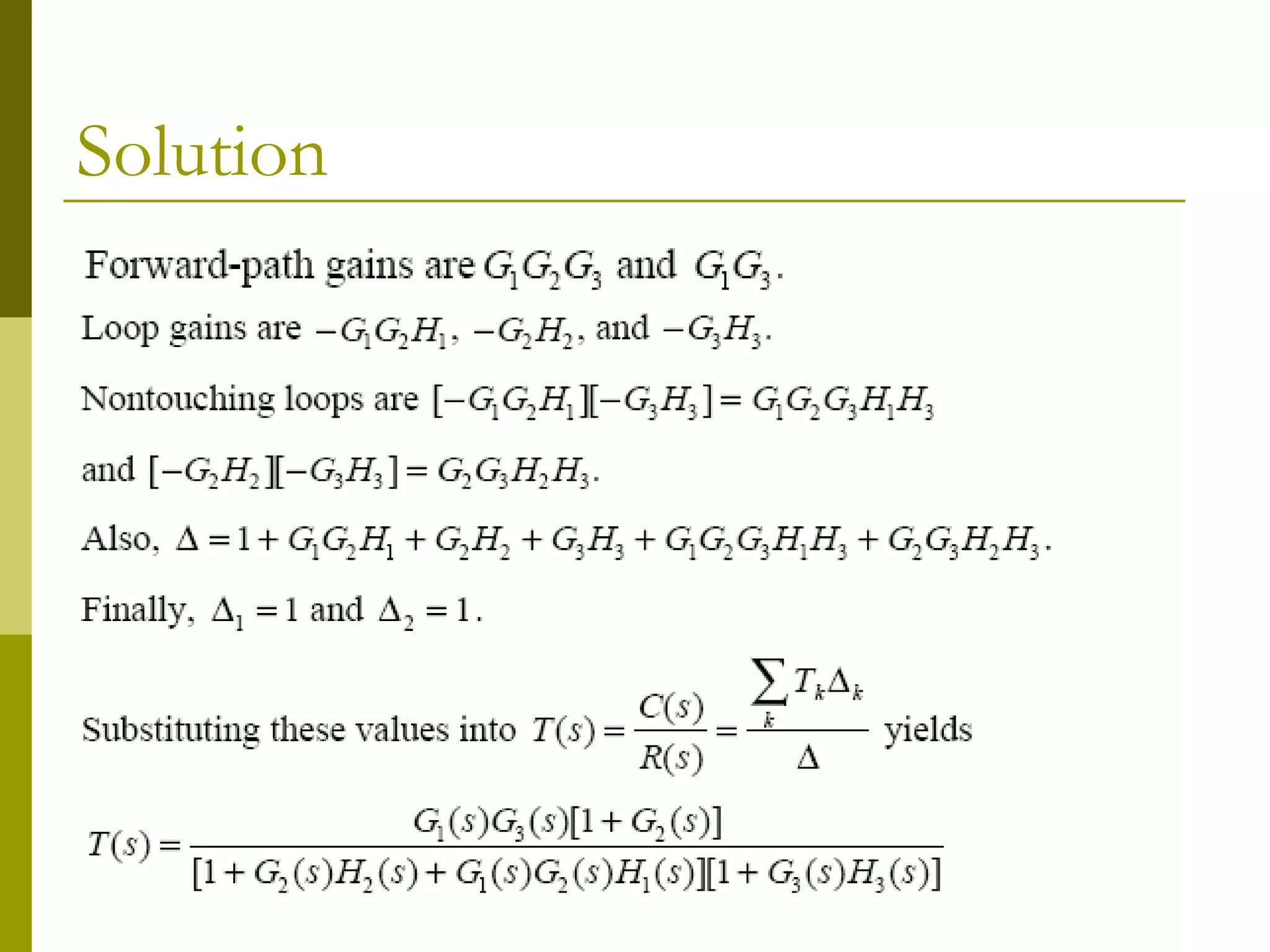
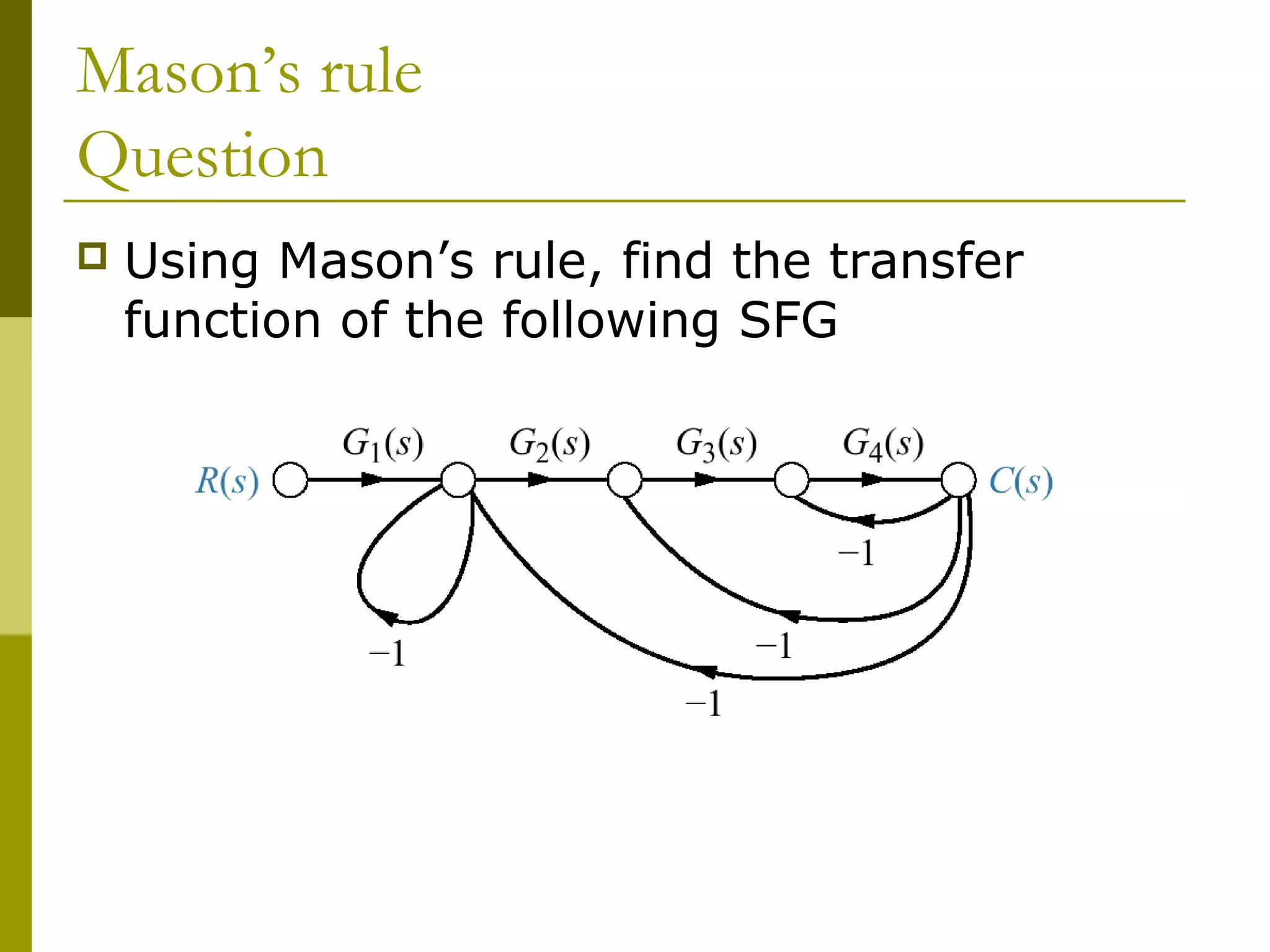
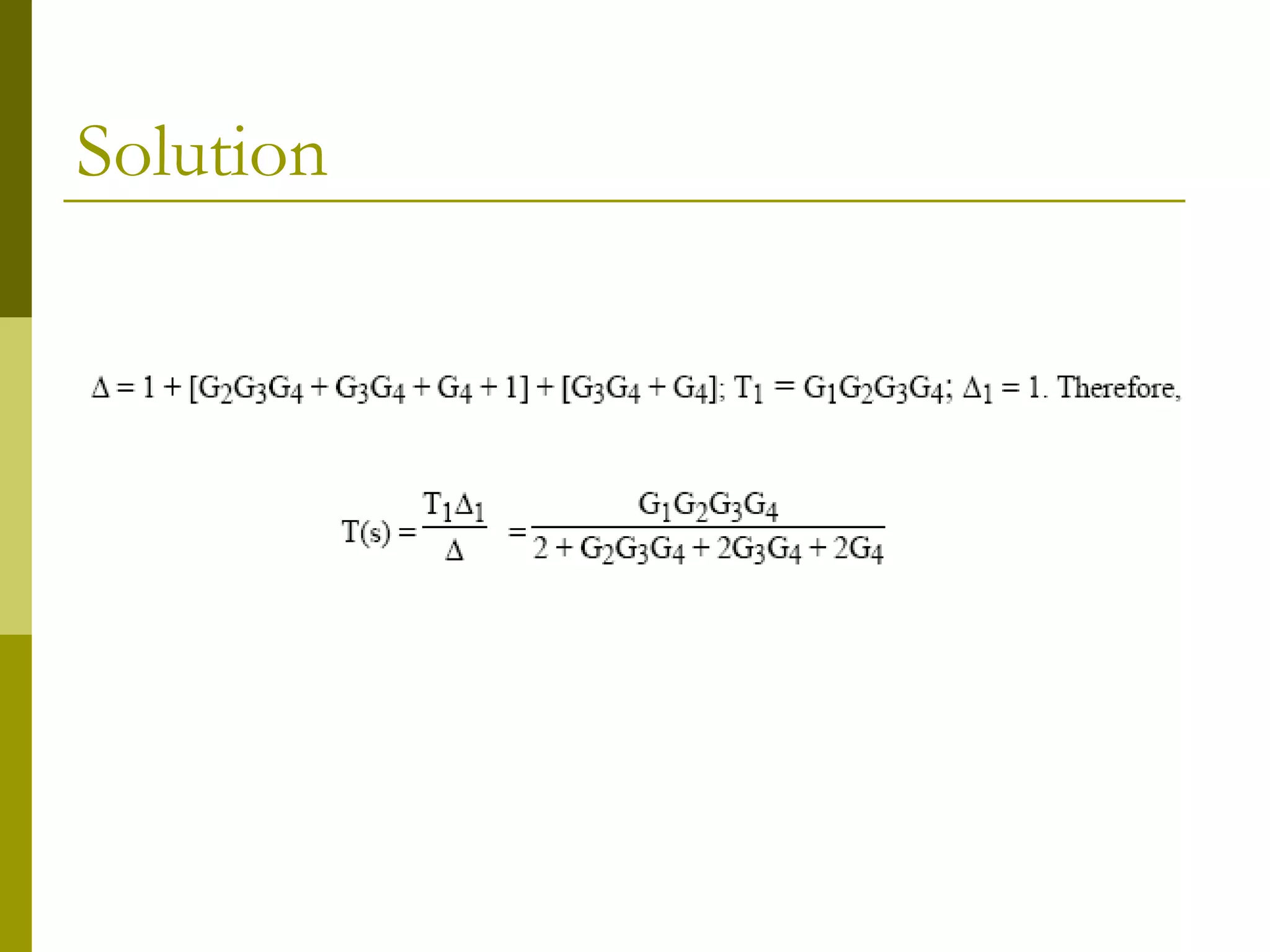
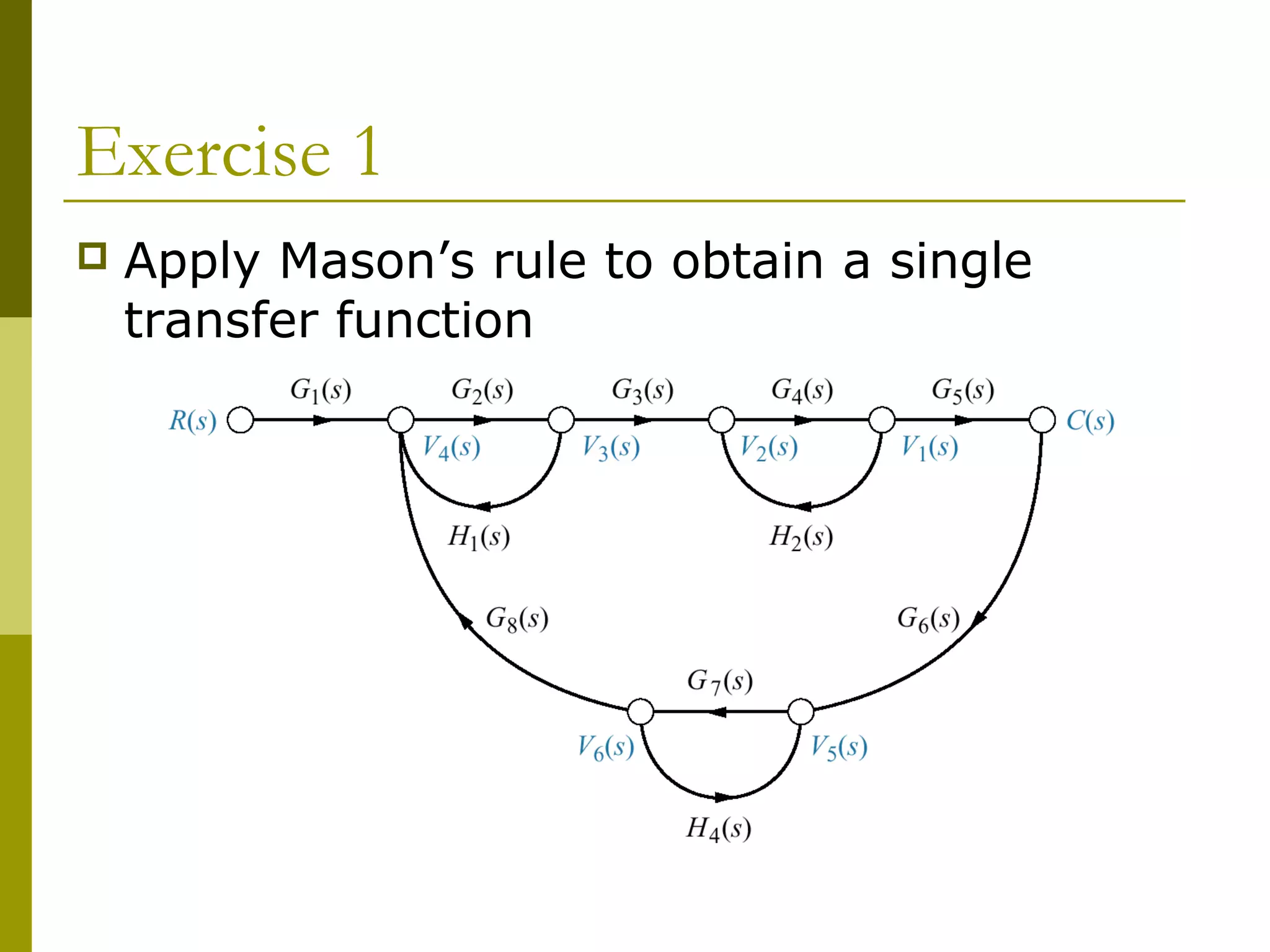
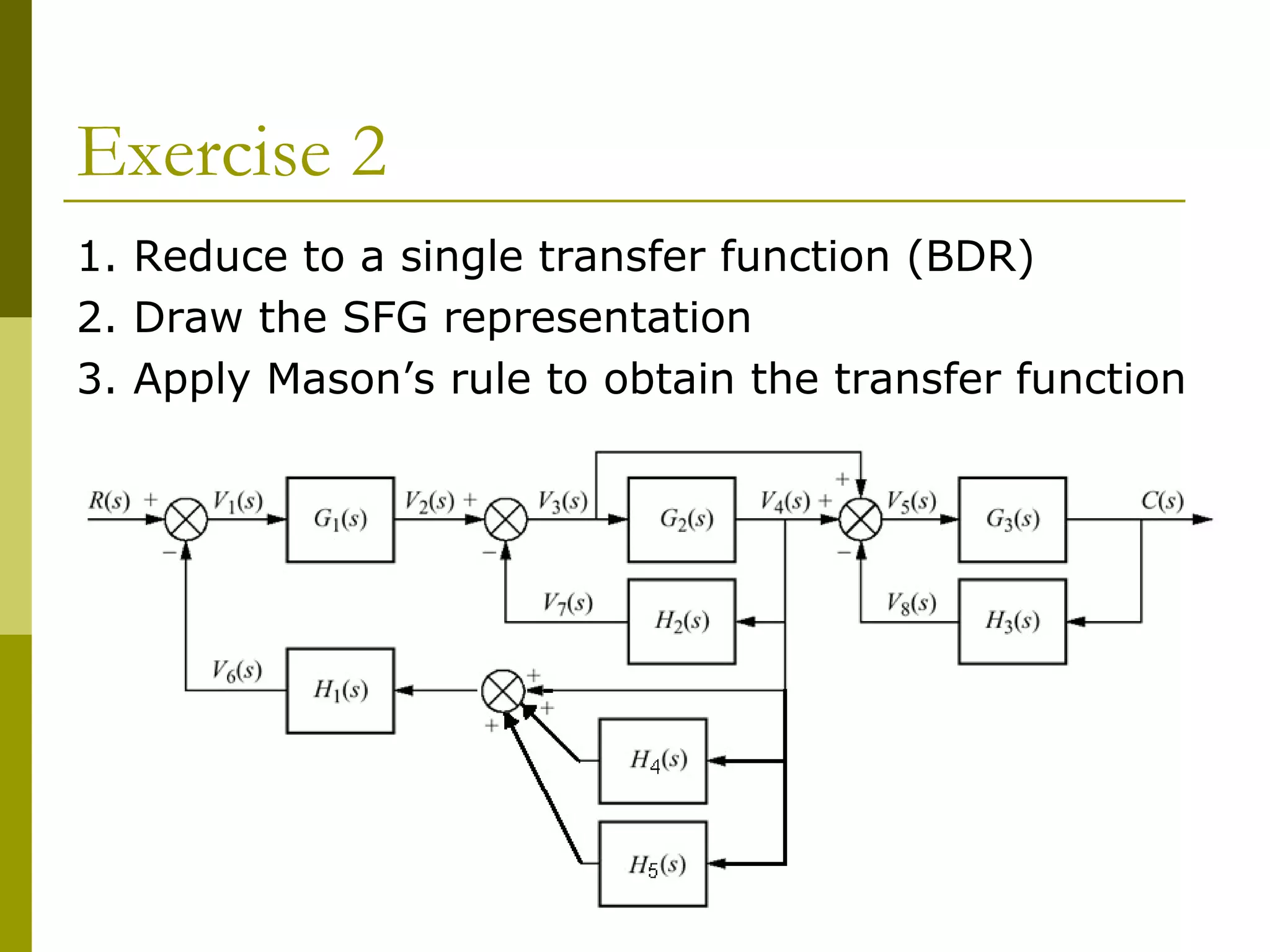
4) Explaining Mason's rule for systematically applying loop and path gains to reduce a signal flow graph down to a single transfer function relating inputs to outputs.
Worked examples are provided
![Mason’s rule
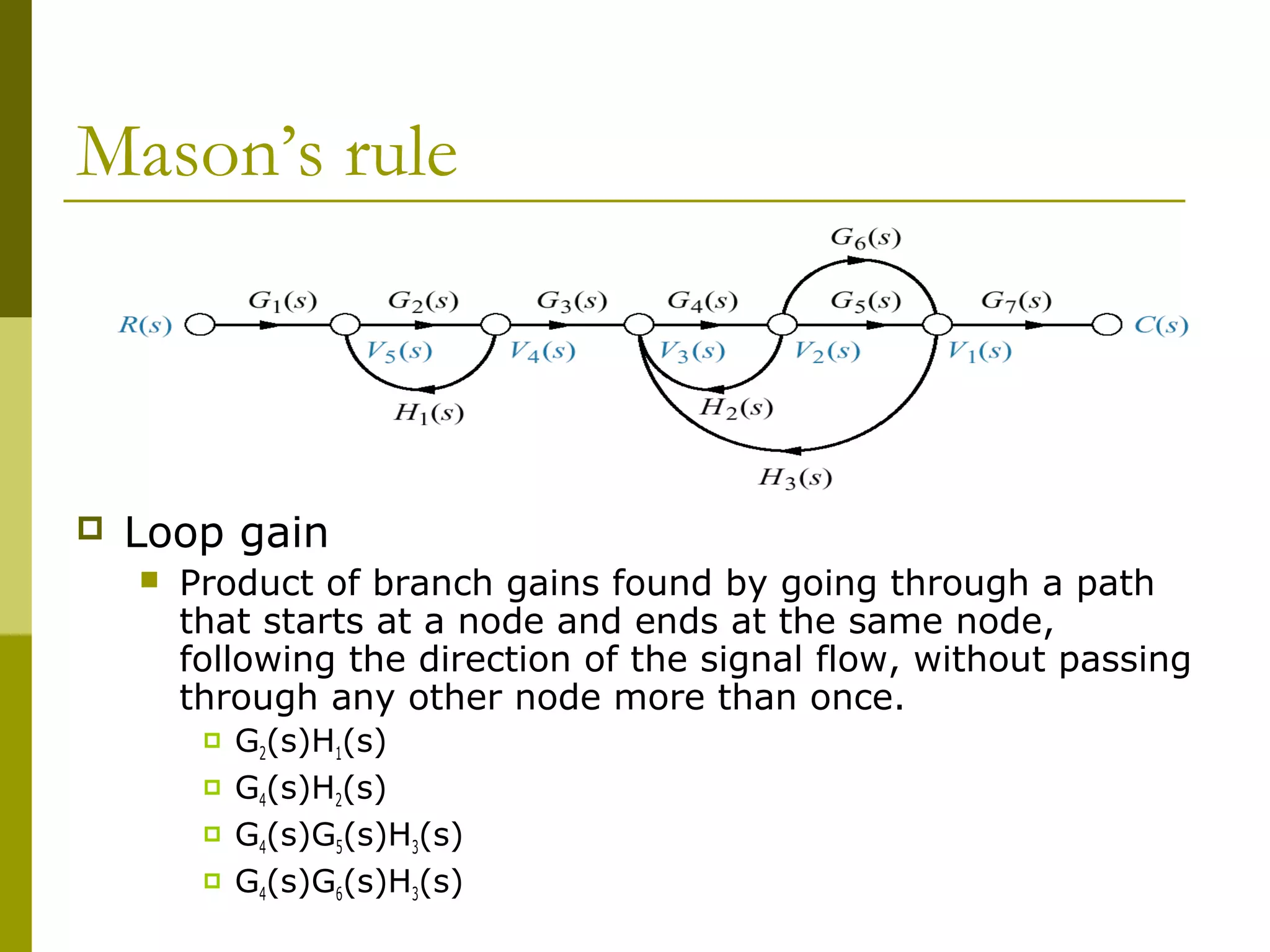
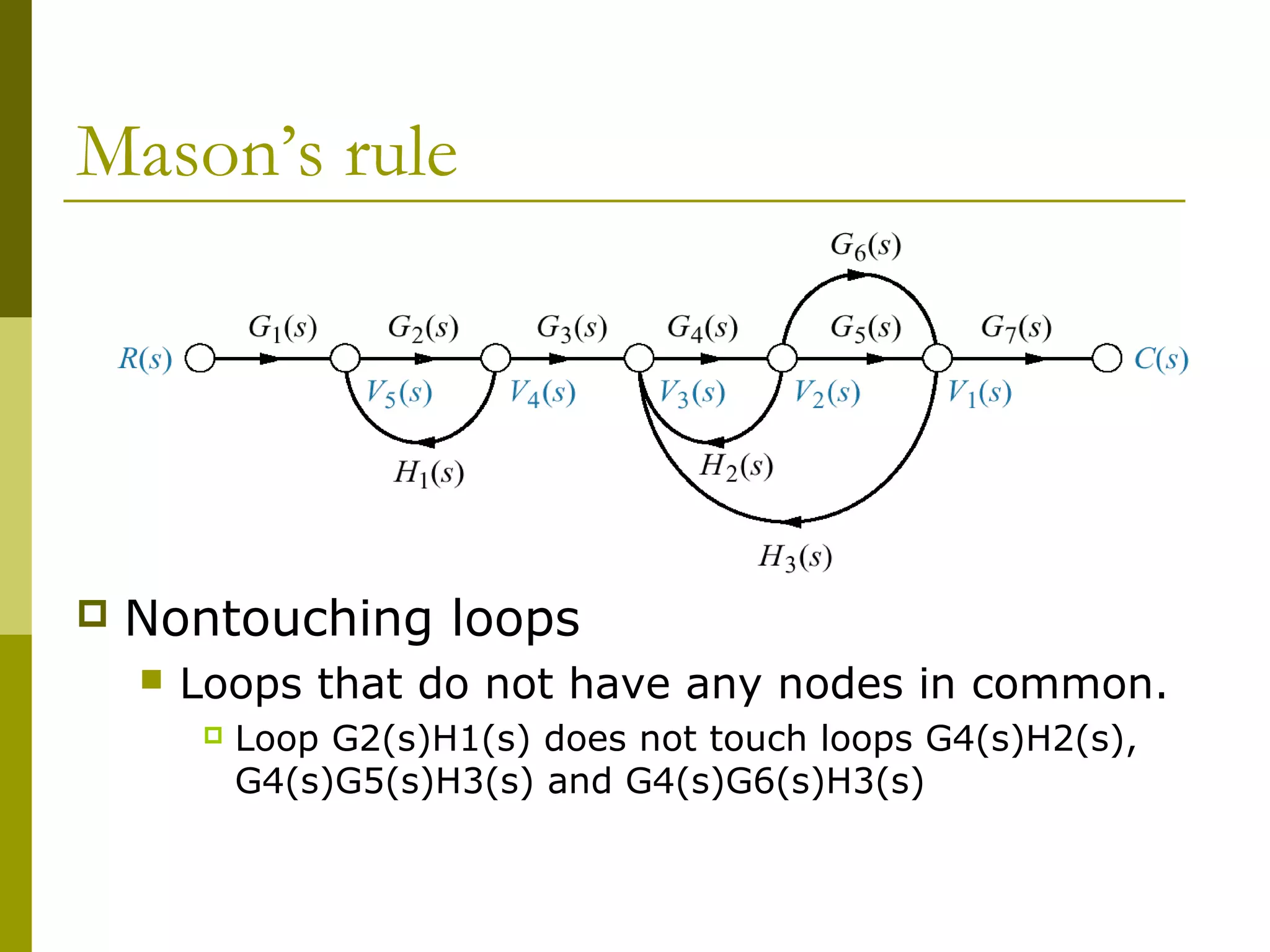
Nontouching-loop gain
Product of gains form nontouching loops taken
two, three, four, or more at a time.
[G2(s)H1(s)][G4(s)H2(s)]
[G2(s)H1(s)][G4(s)G5(s)H3(s)]
[G2(s)H1(s)][G4(s)G6(s)H3(s)]](https://image.slidesharecdn.com/controlchap3-blockdiagram-230921065912-bdded3a8/75/controlchap3-blockdiagram-pdf-36-2048.jpg)











![[Andrew R. Hileman] Insulation Coordination for Power System.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/andrewr-220712215355-dd7dfea9-thumbnail.jpg?width=640&height=640&fit=bounds)
































































