Downloaded 33 times
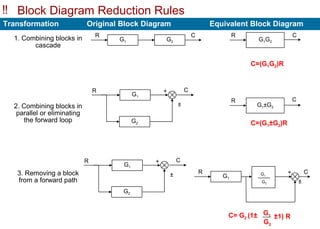
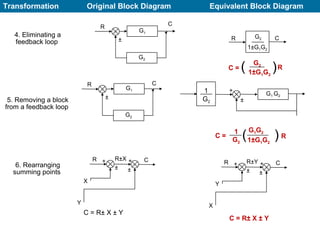
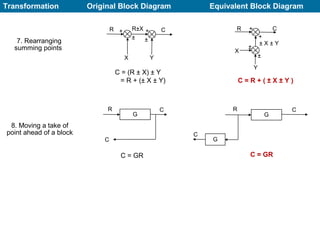
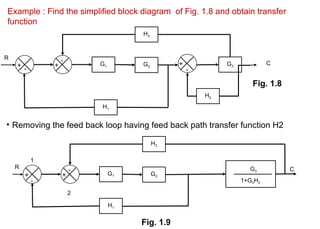
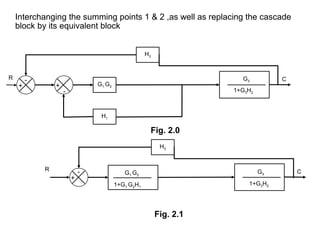
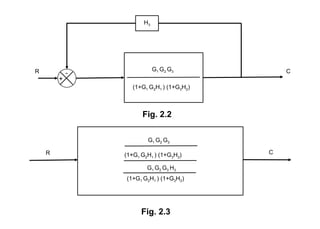
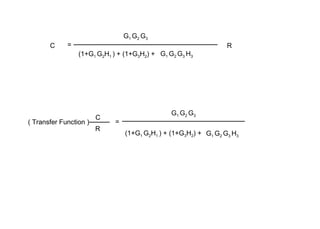

The document explains control systems, defining control as the regulation of a system to achieve objectives. It covers components like inputs, outputs, block diagrams, transfer functions, and their properties, advantages, and disadvantages, while emphasizing their role in linear systems. Additionally, it discusses multi-loop control and block diagram reduction rules for simplification.