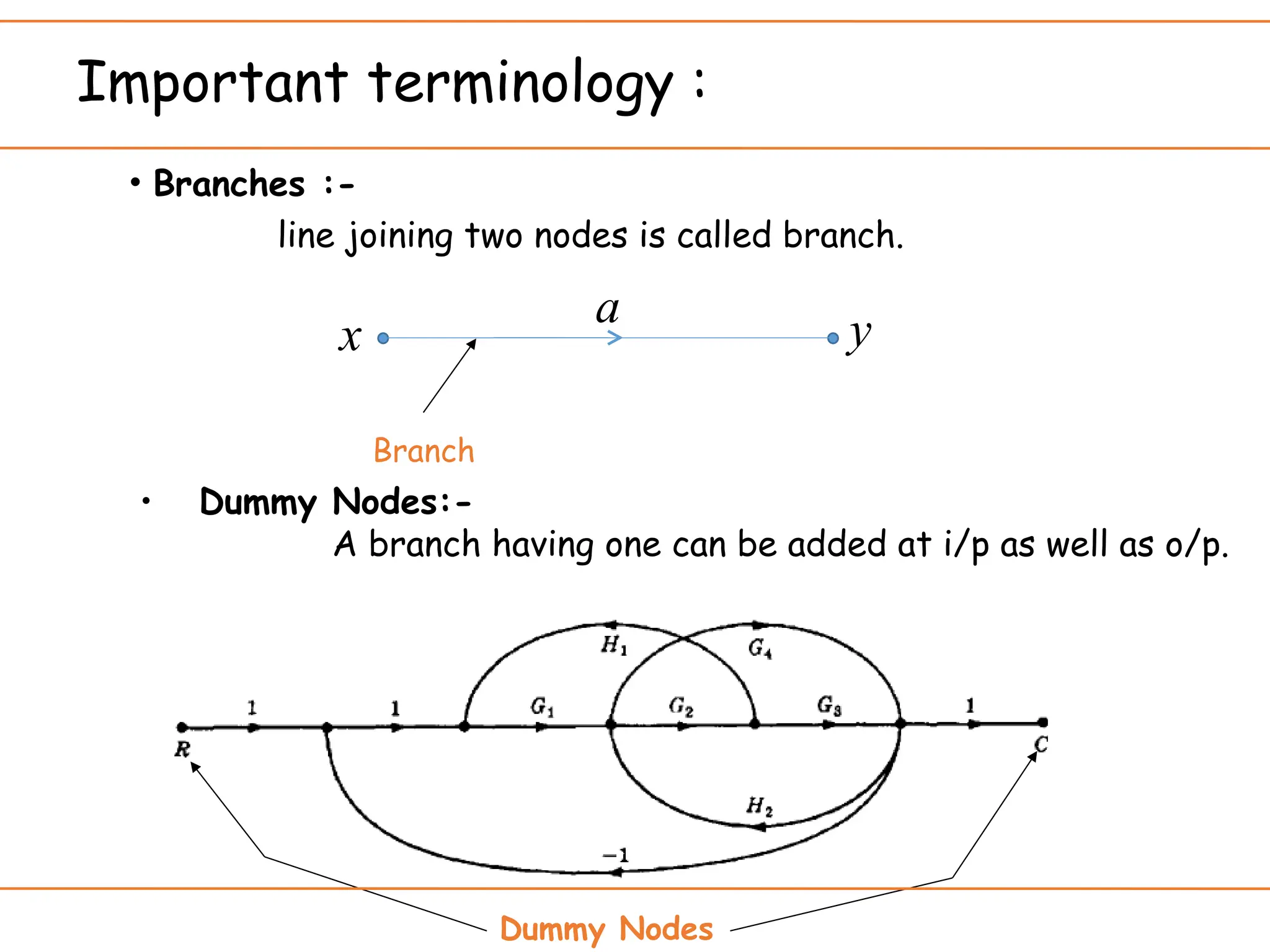
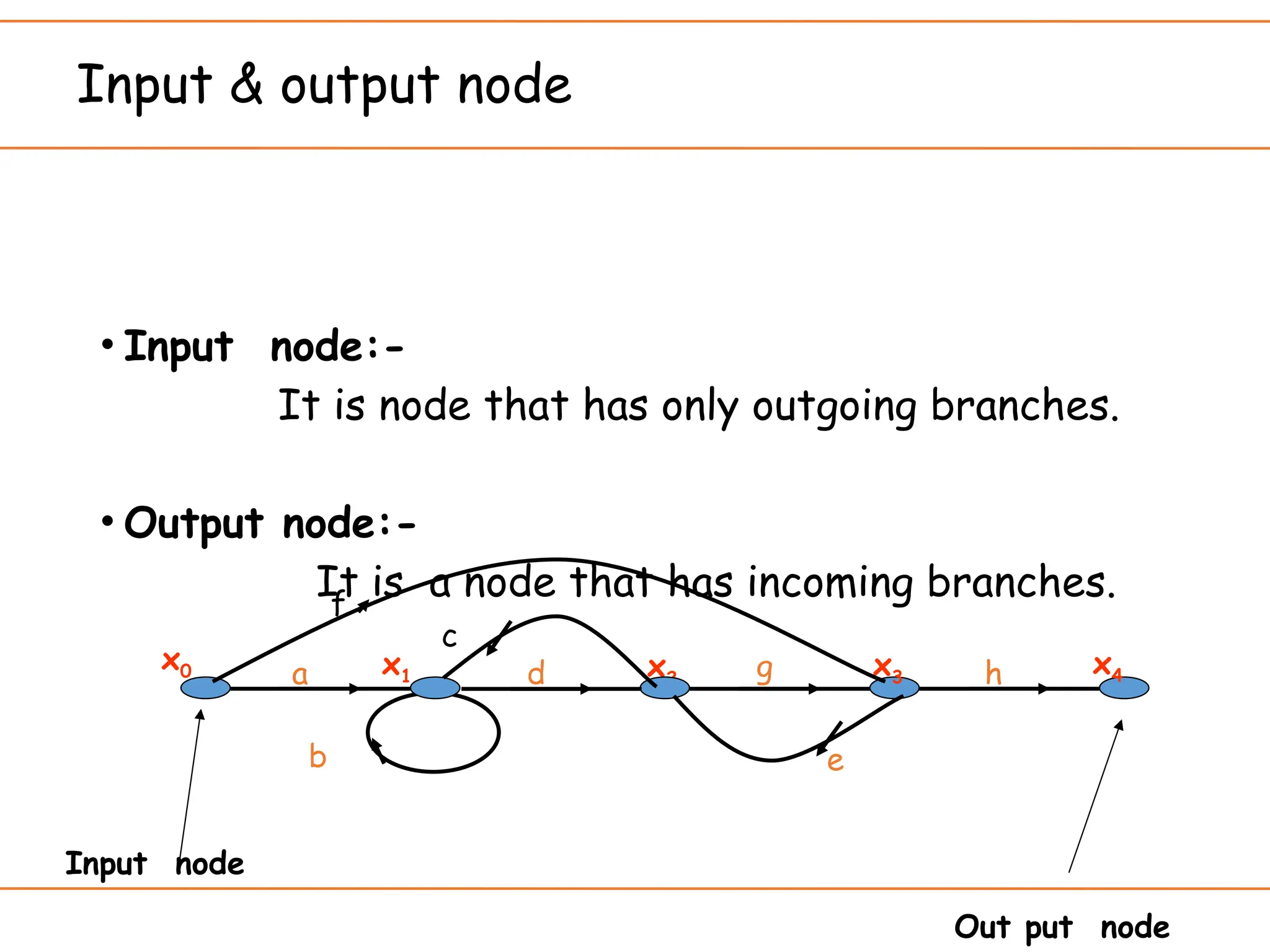
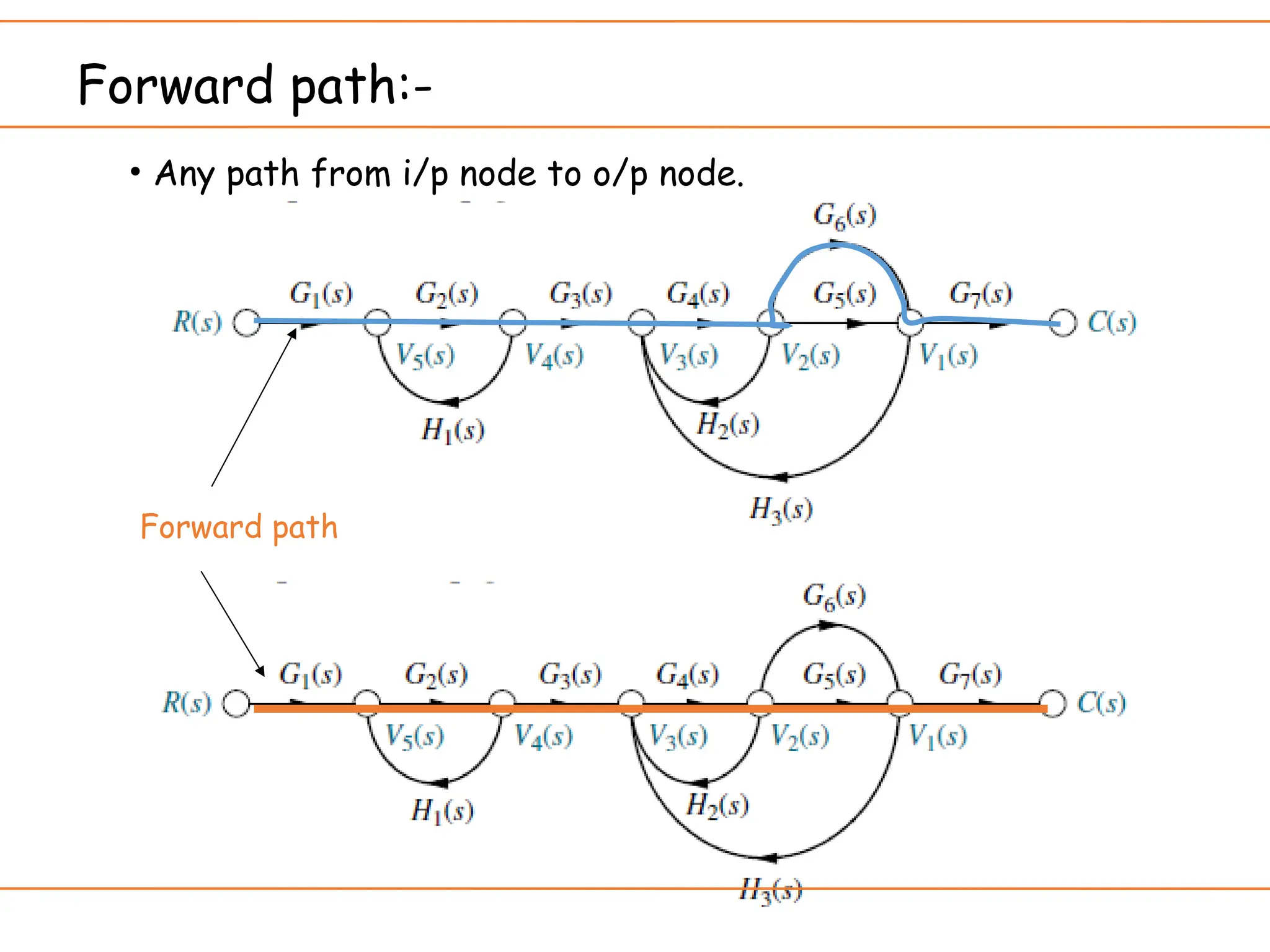
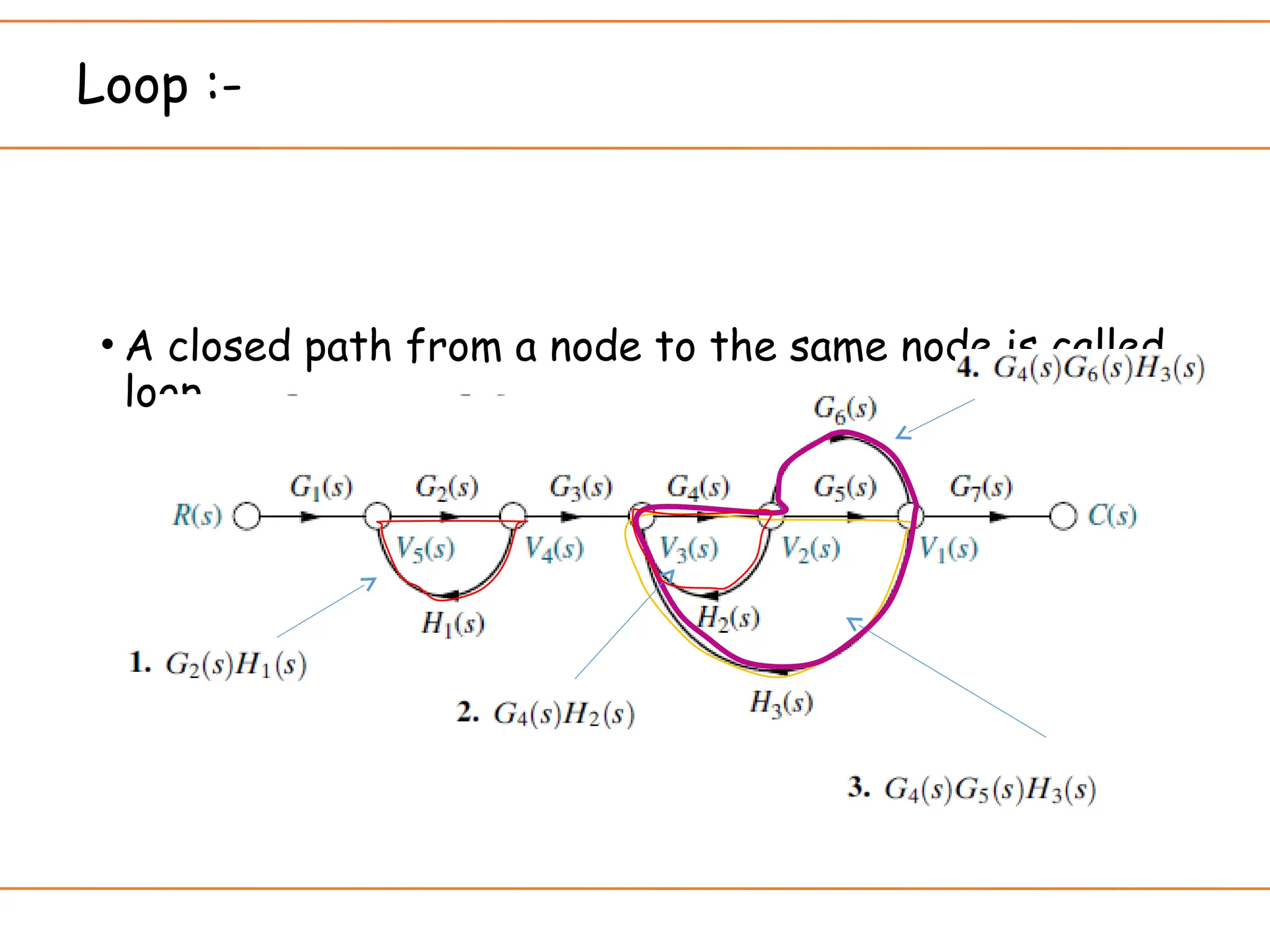
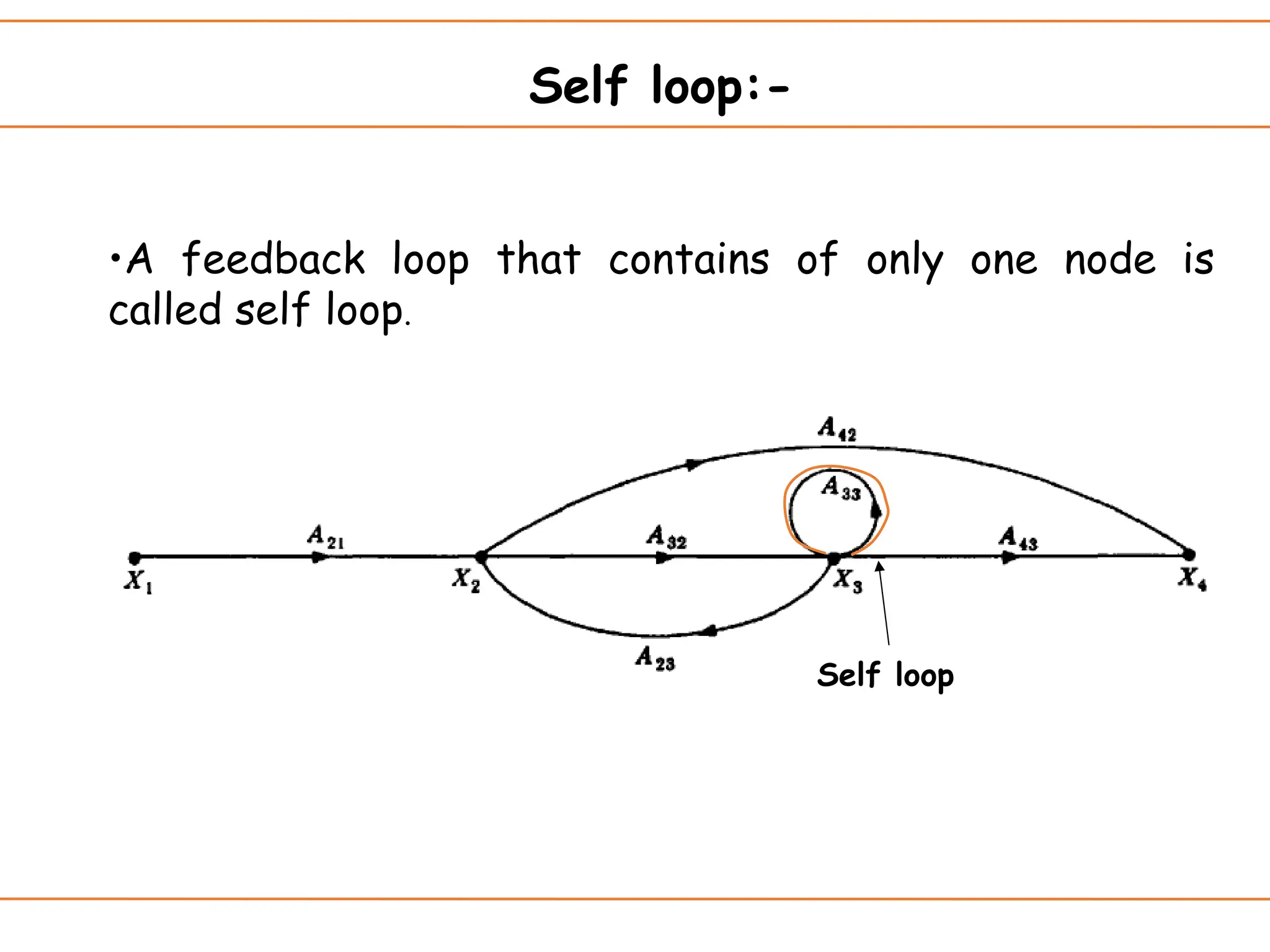
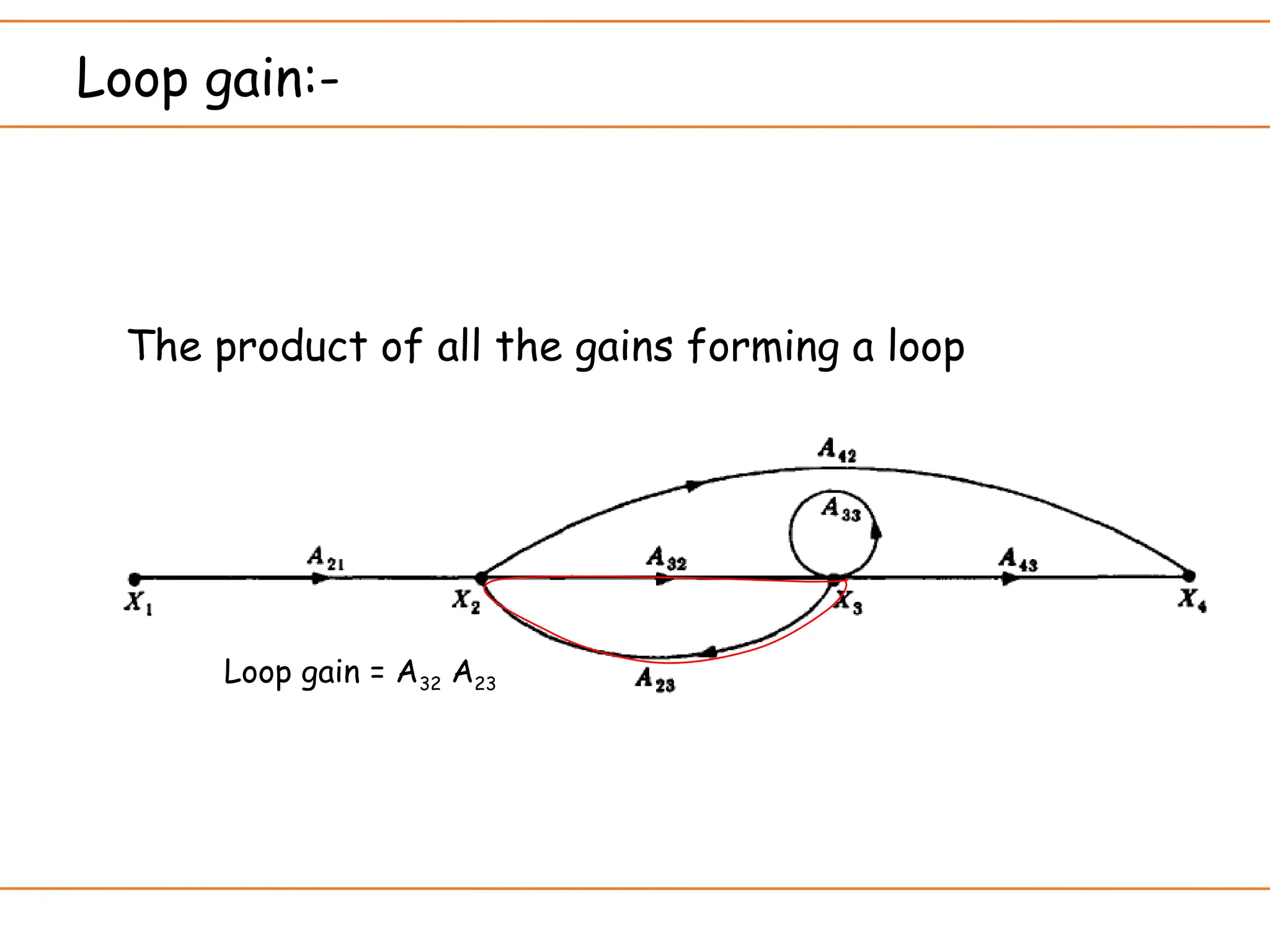
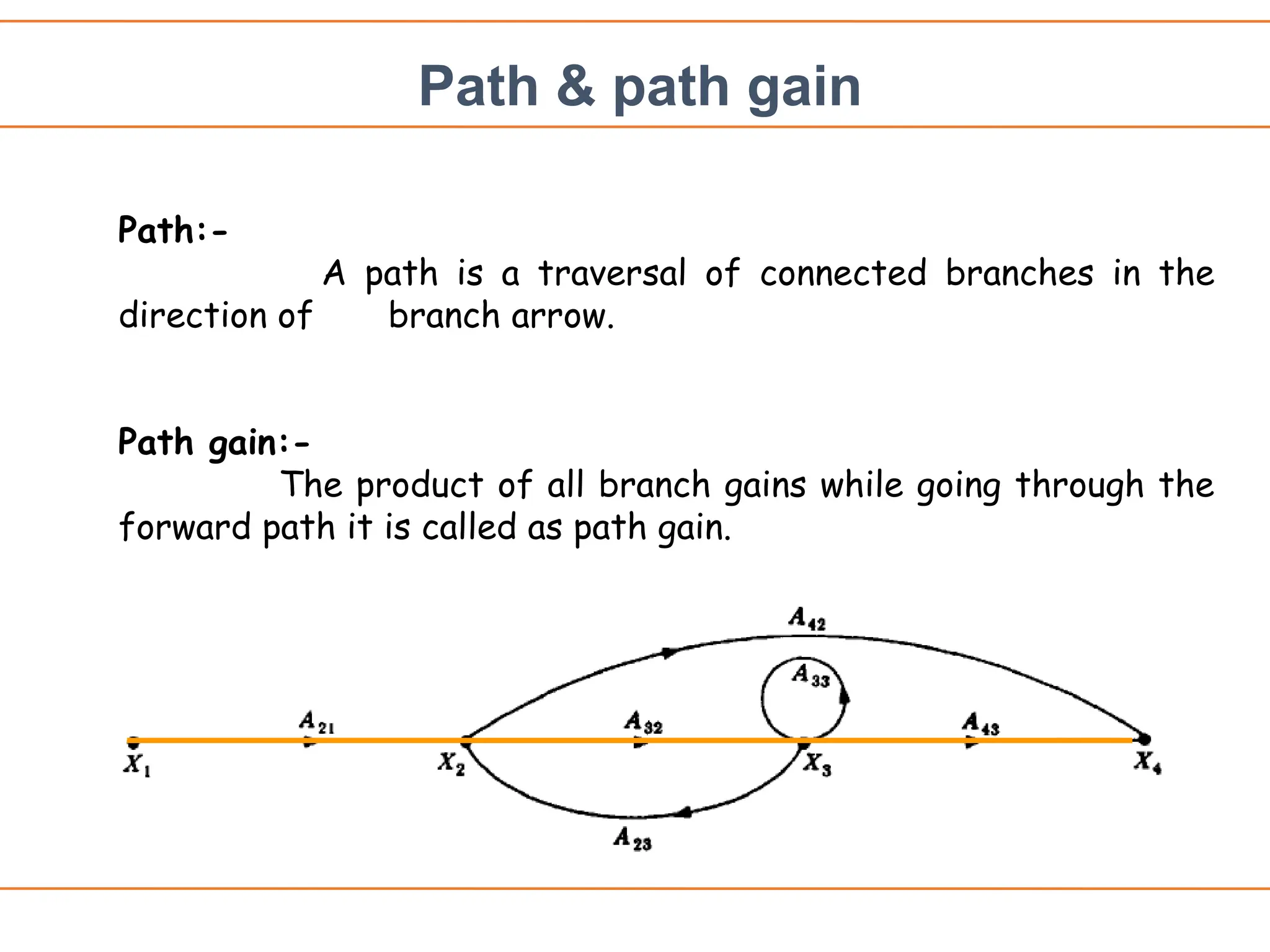
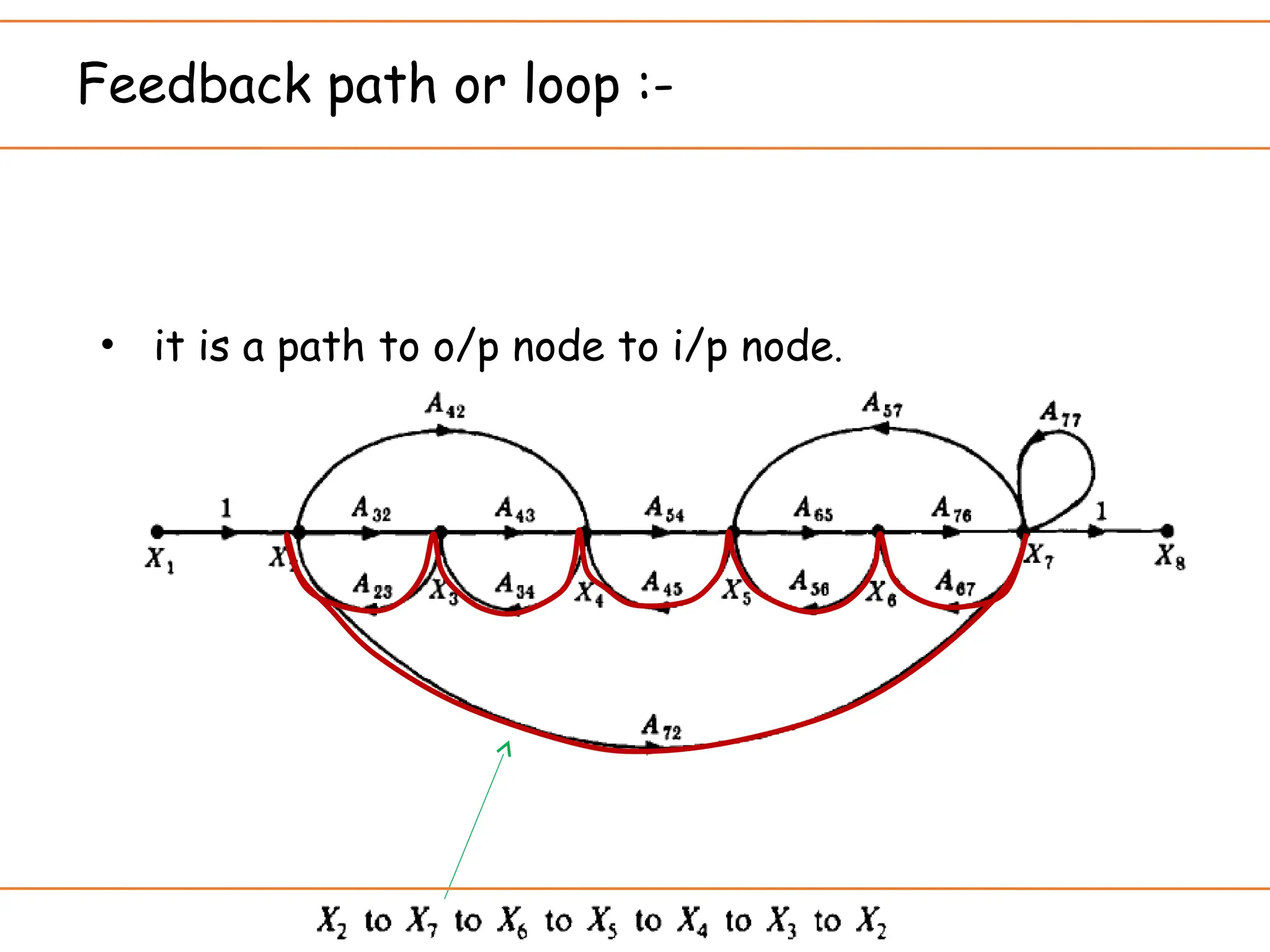
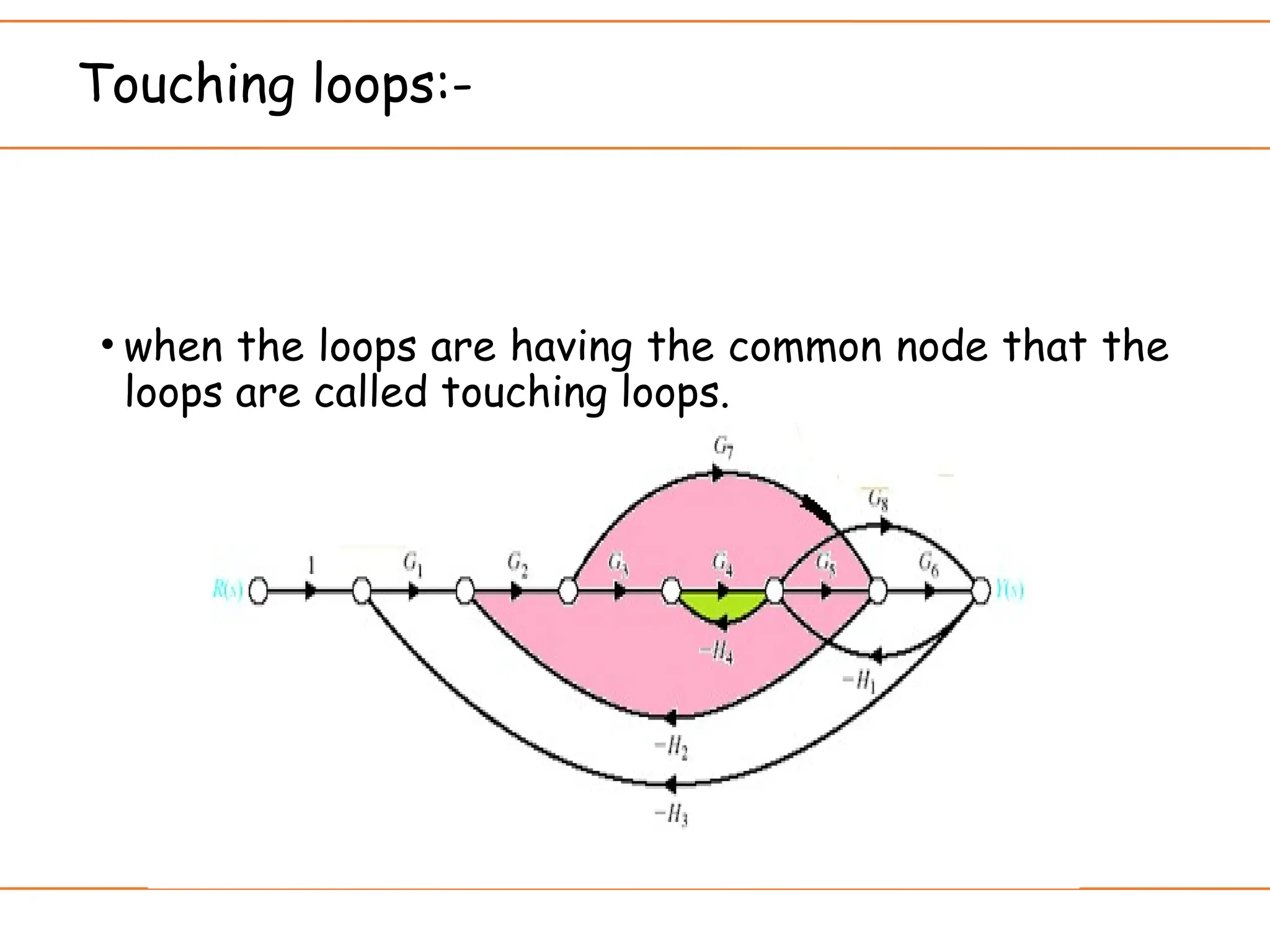
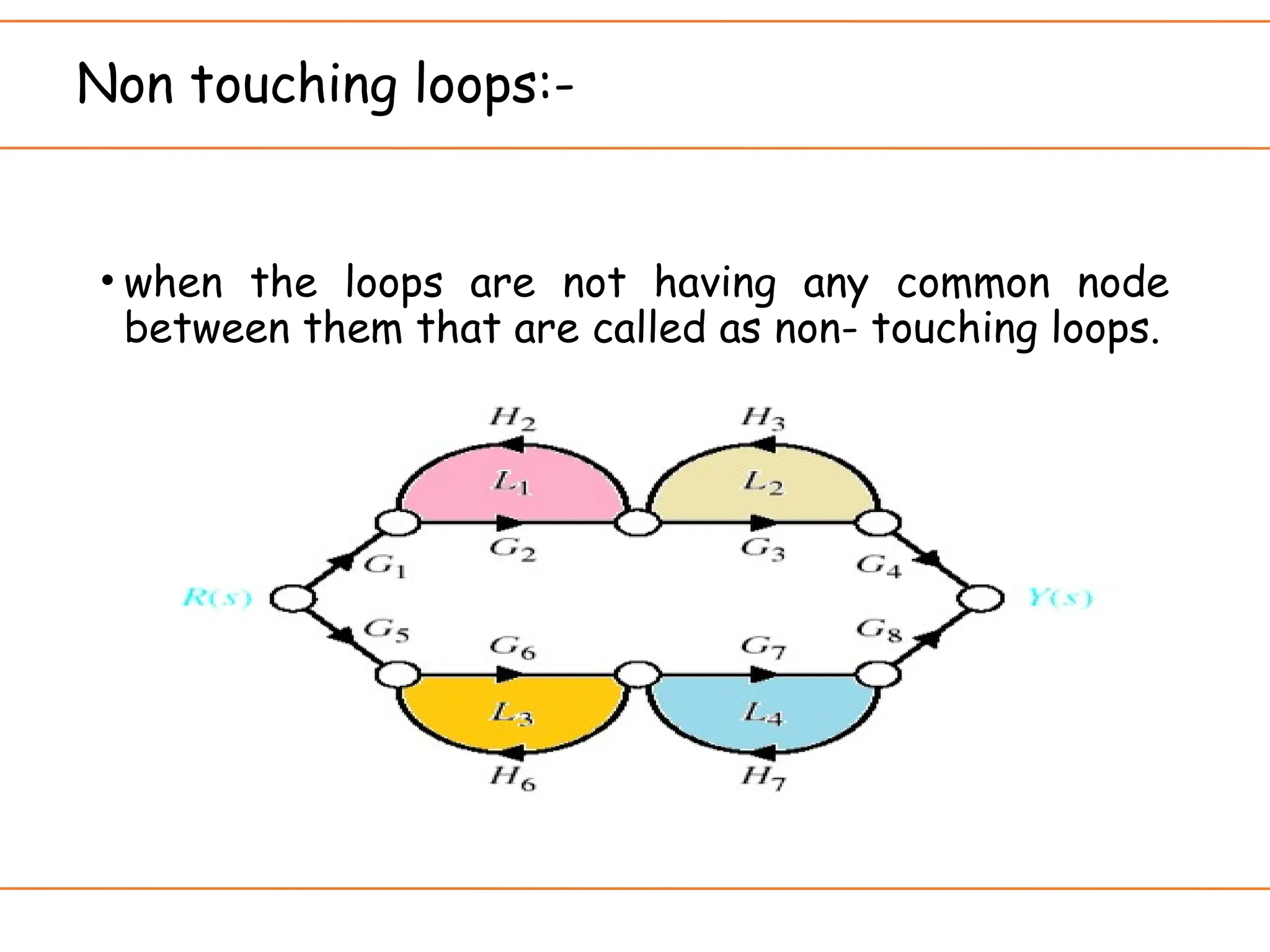
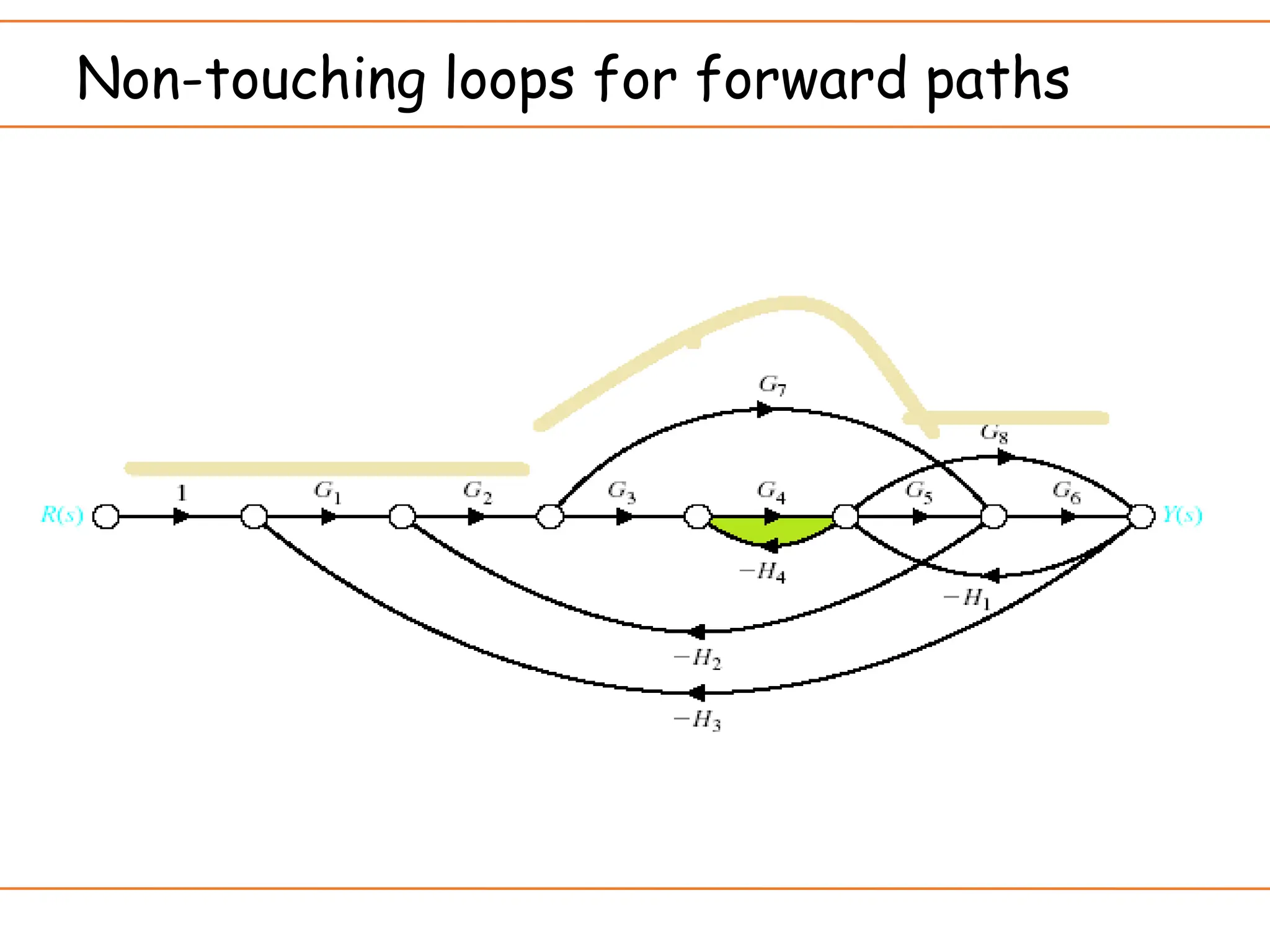
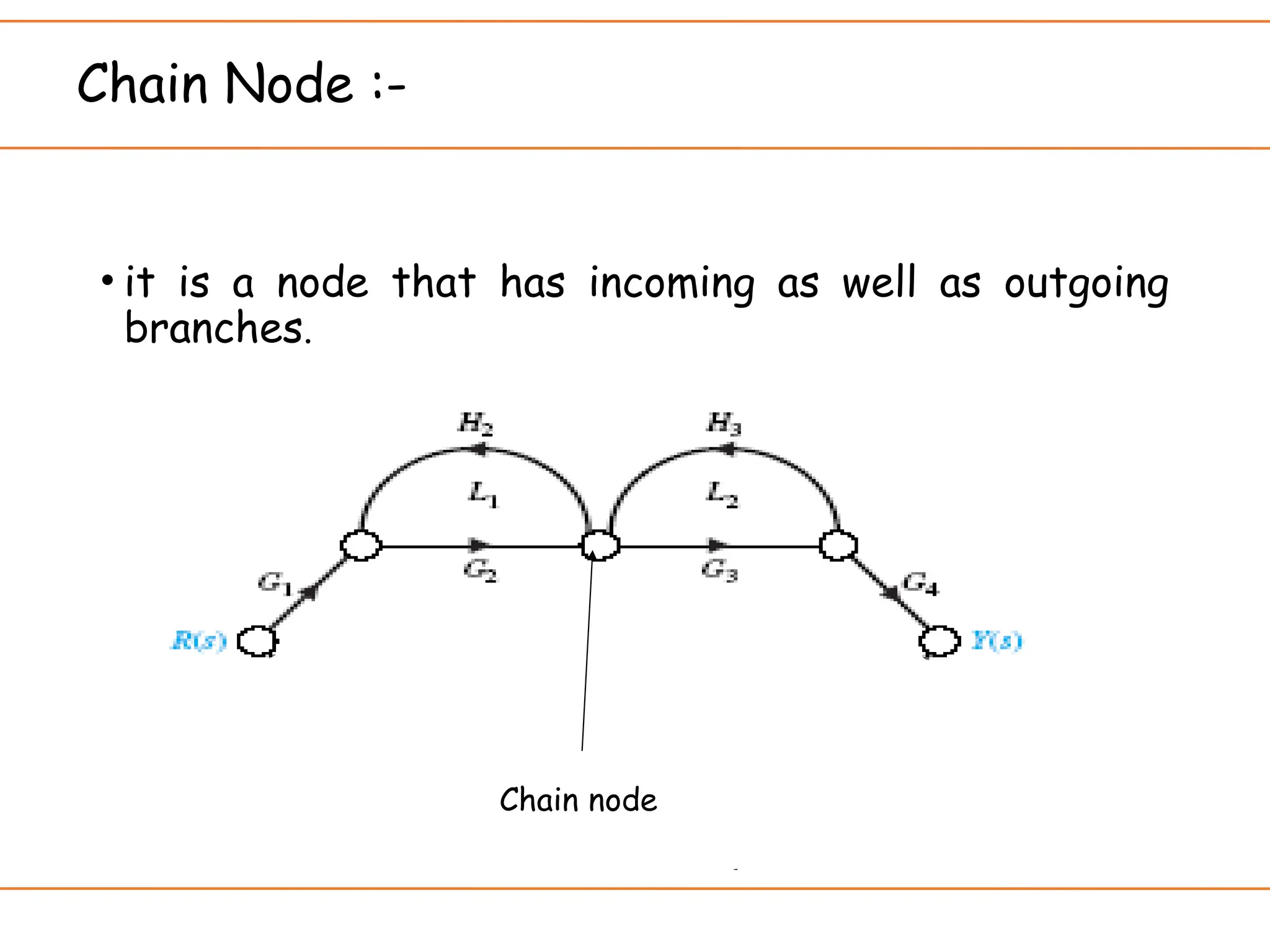
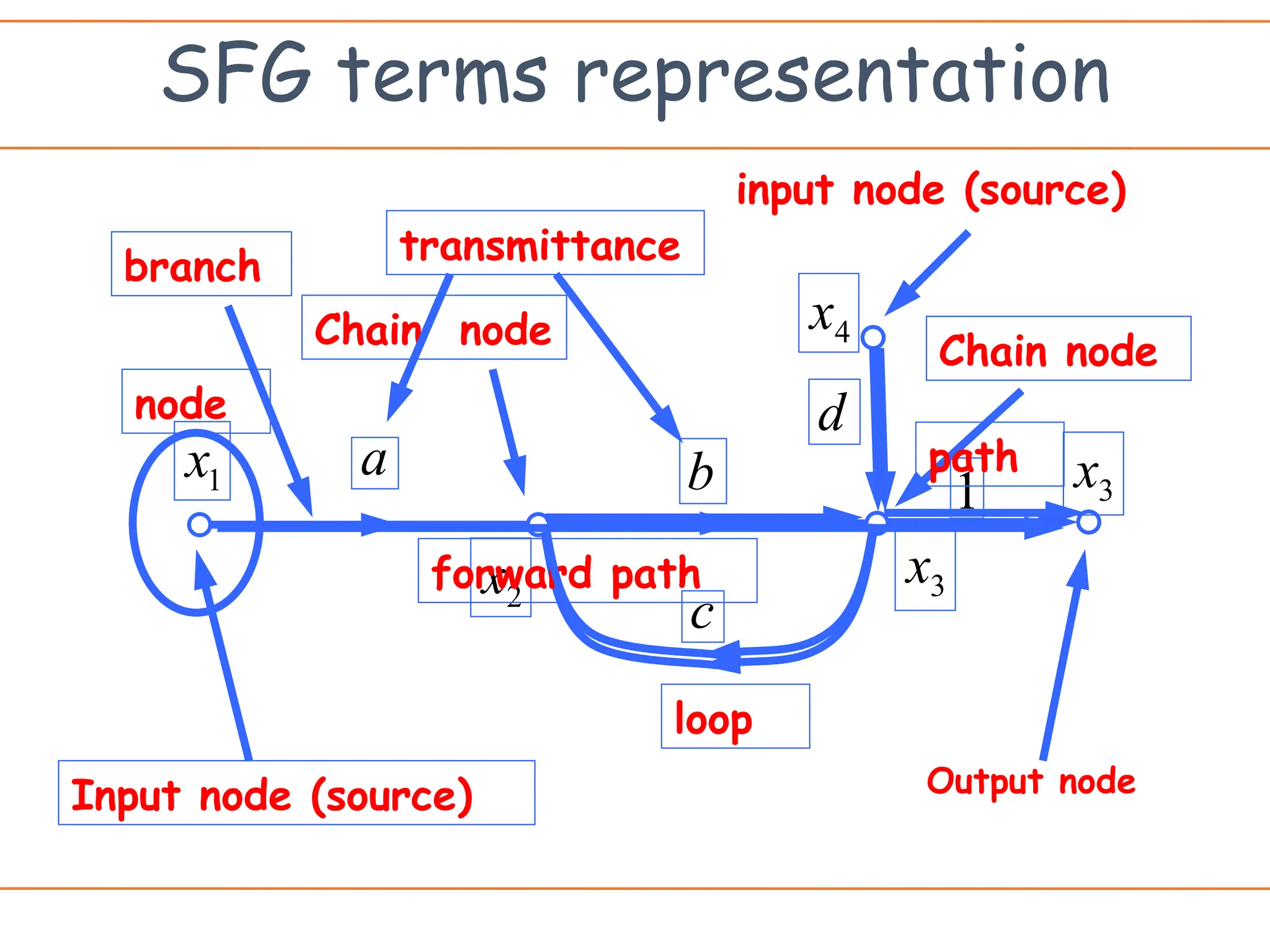
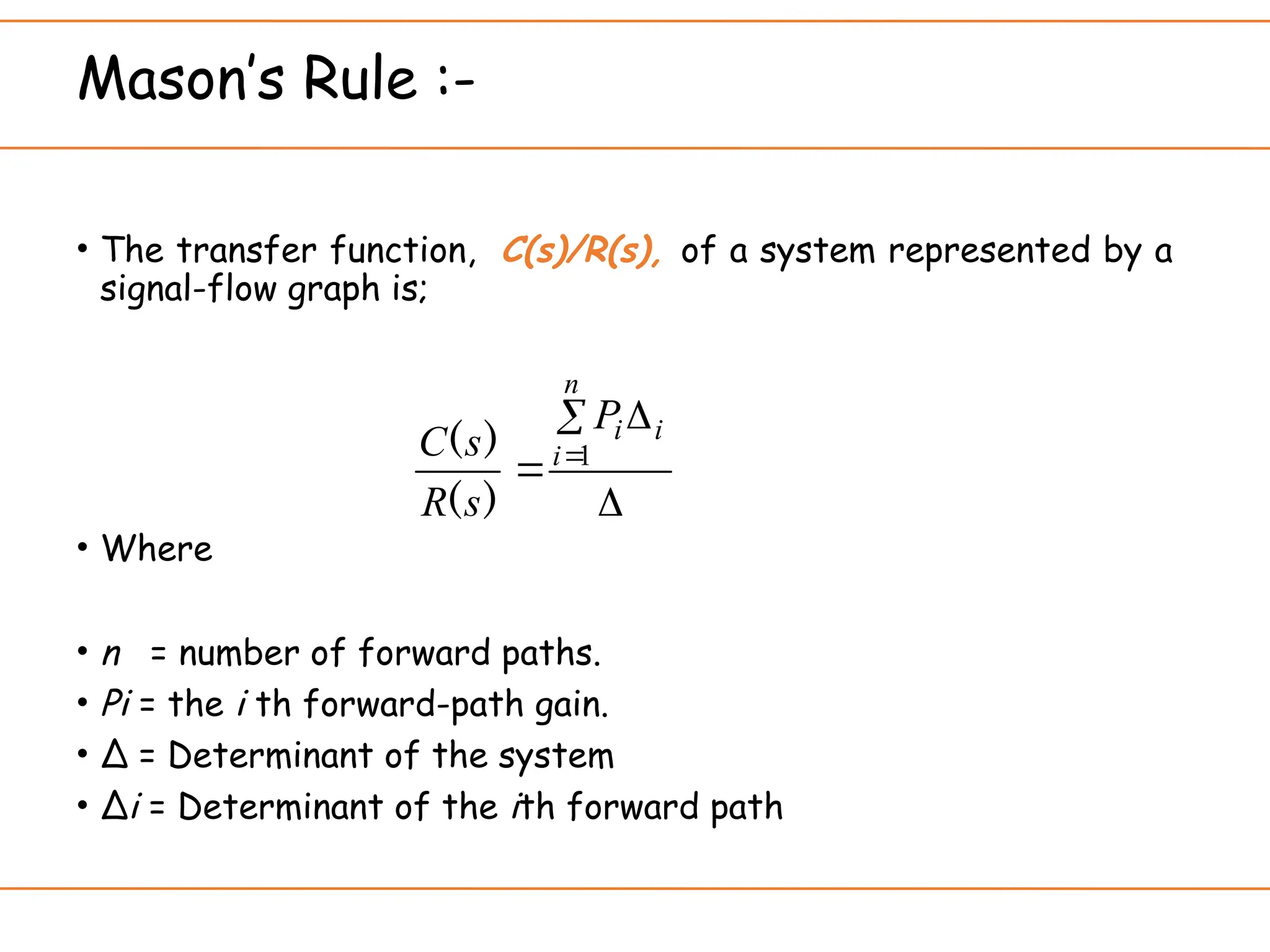
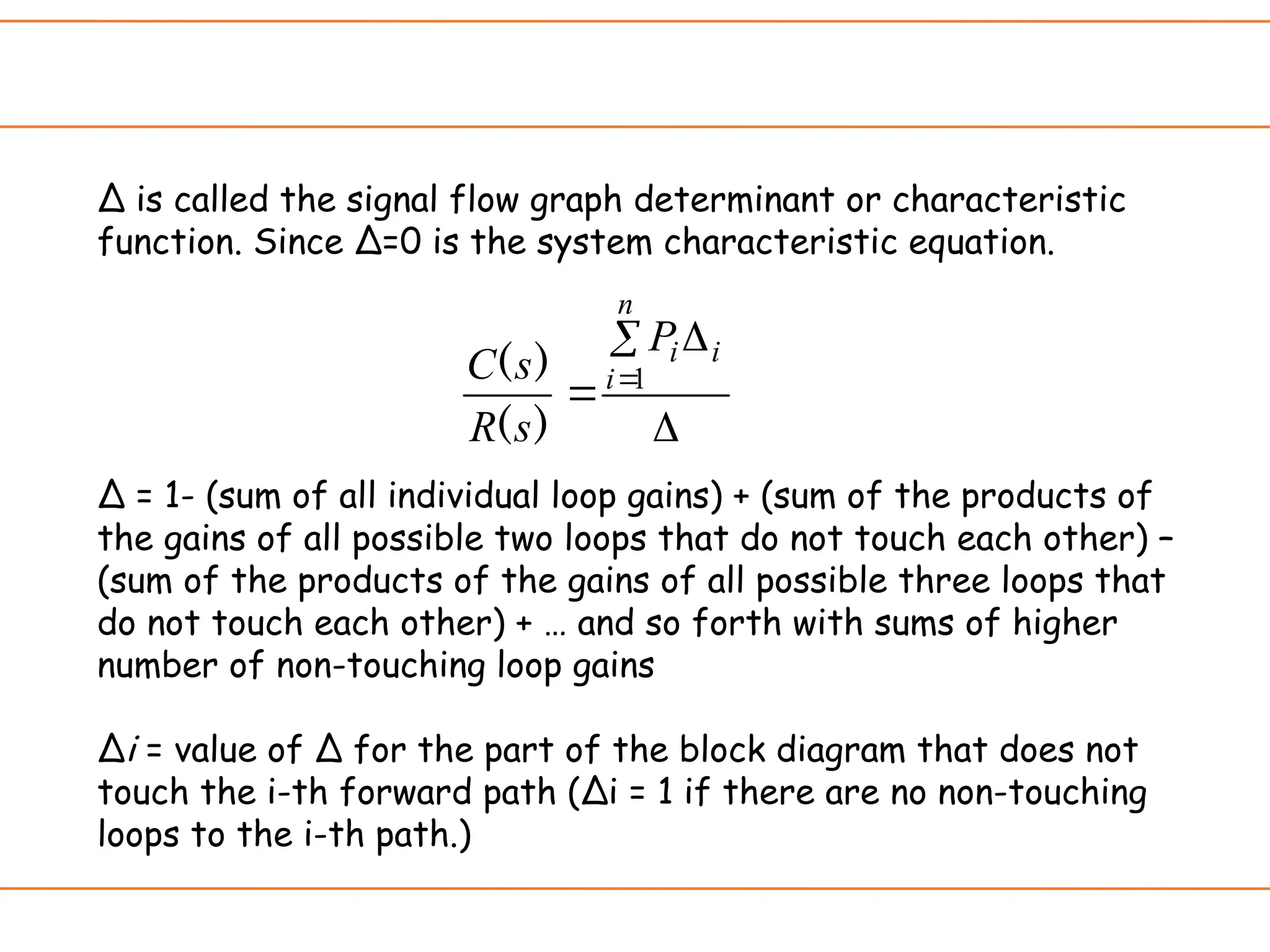
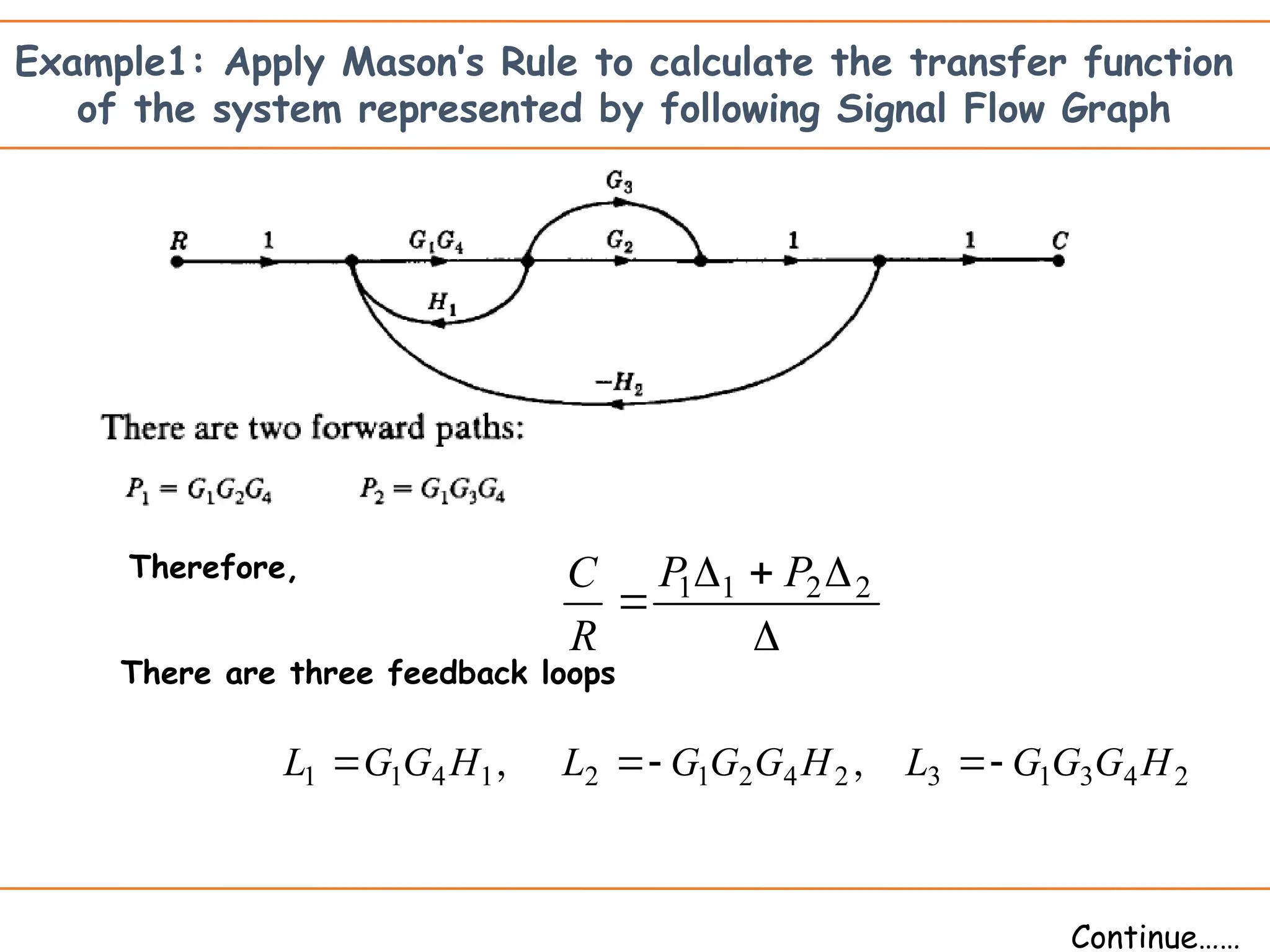
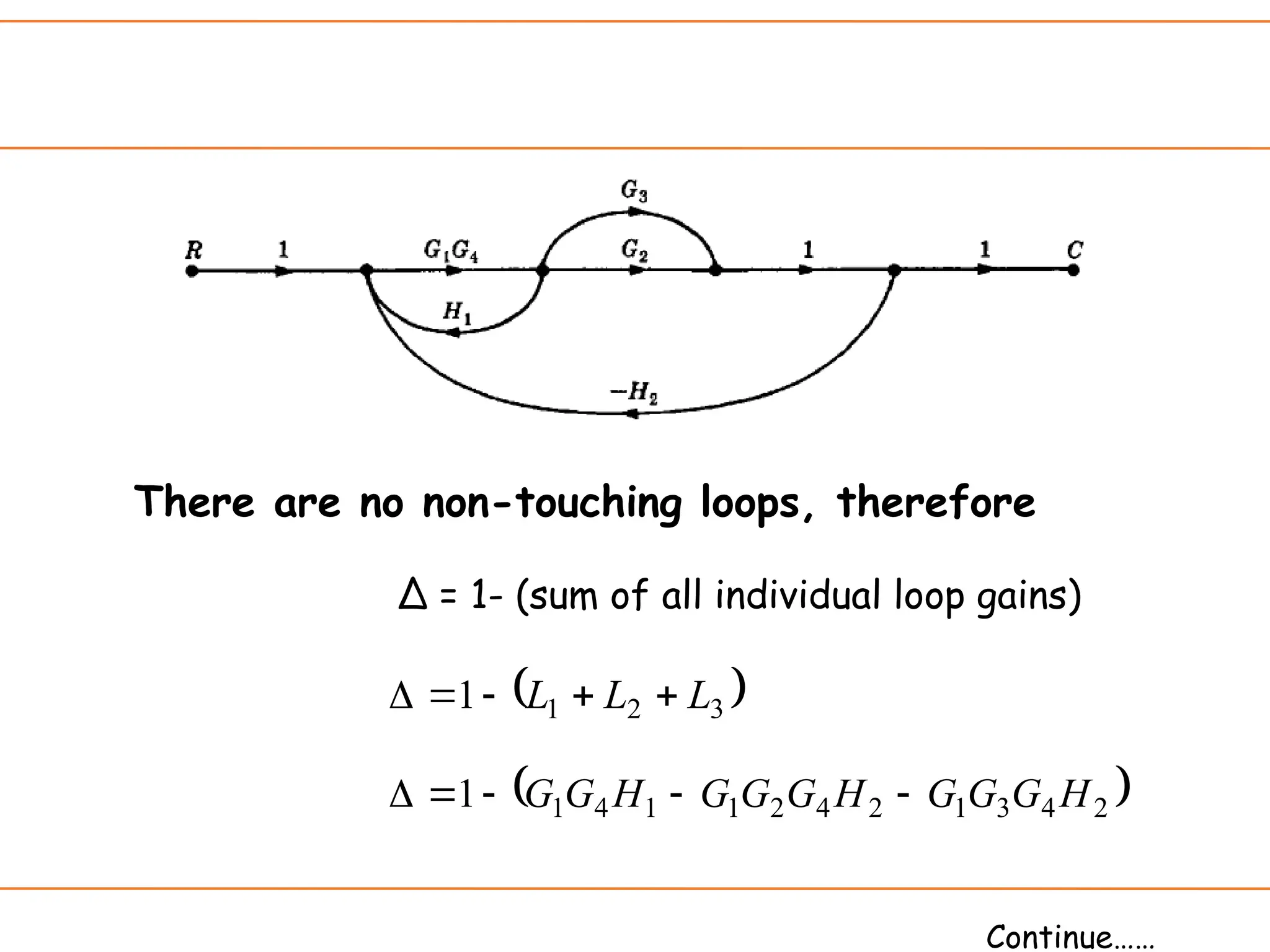
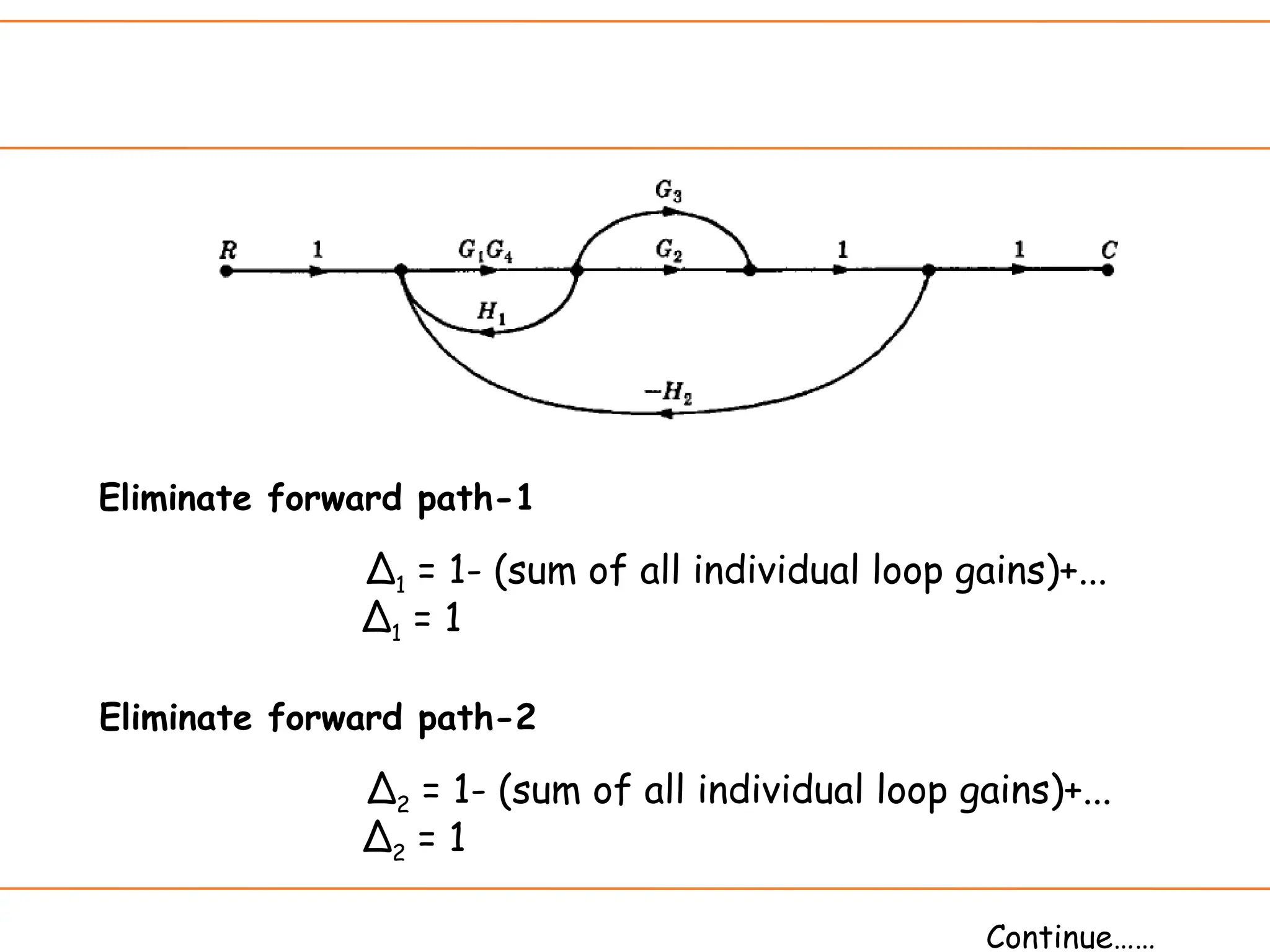
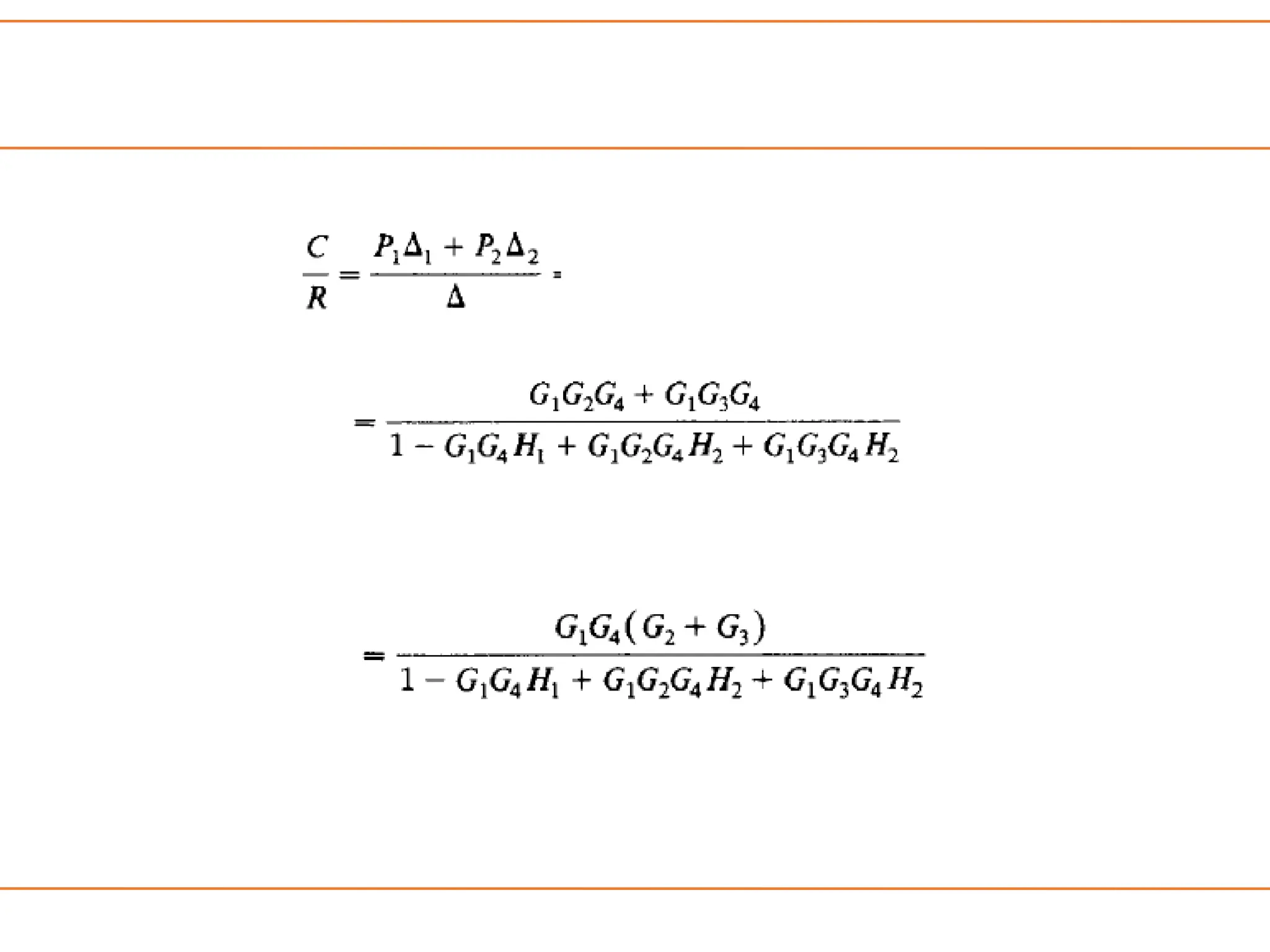
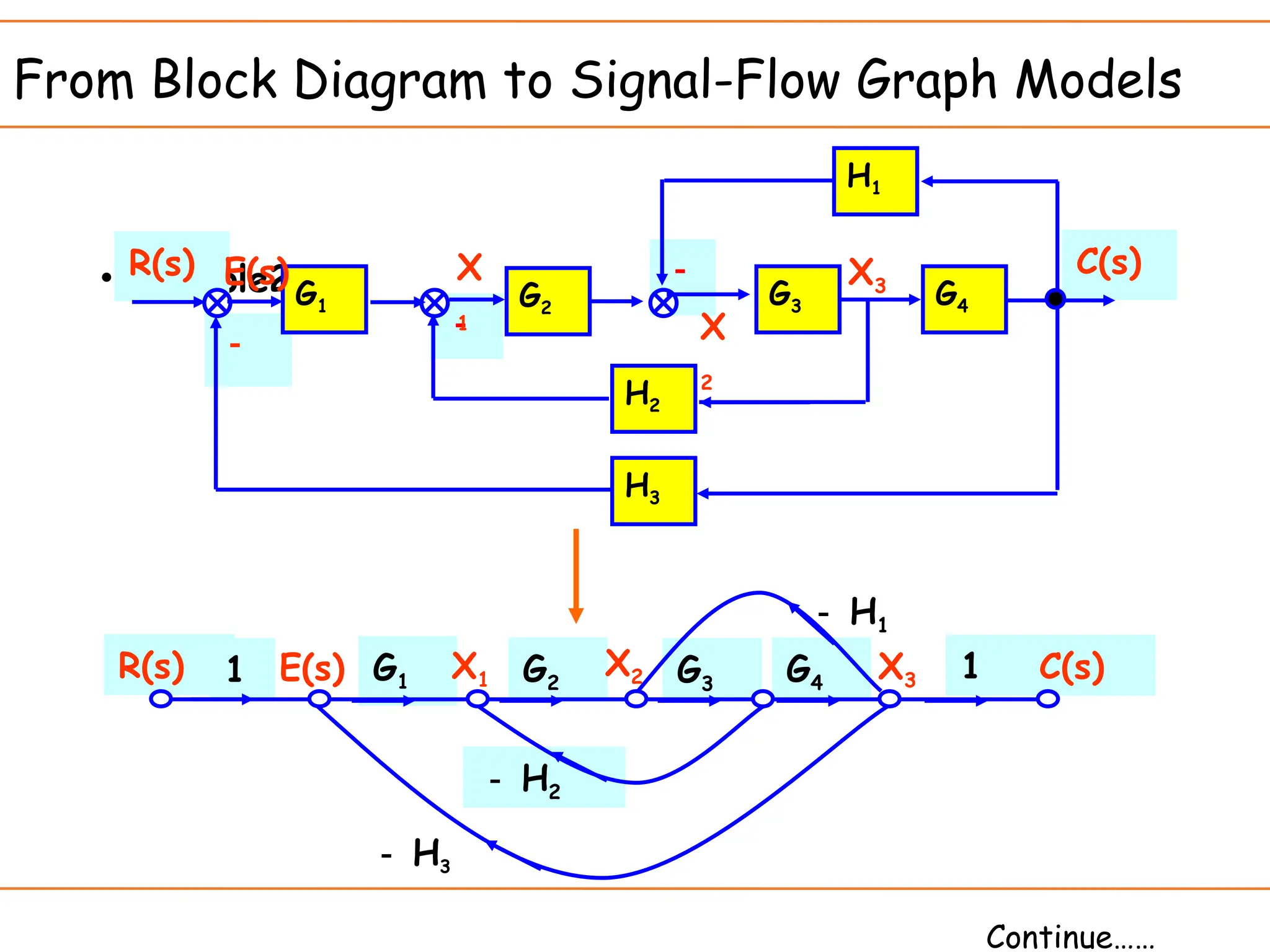
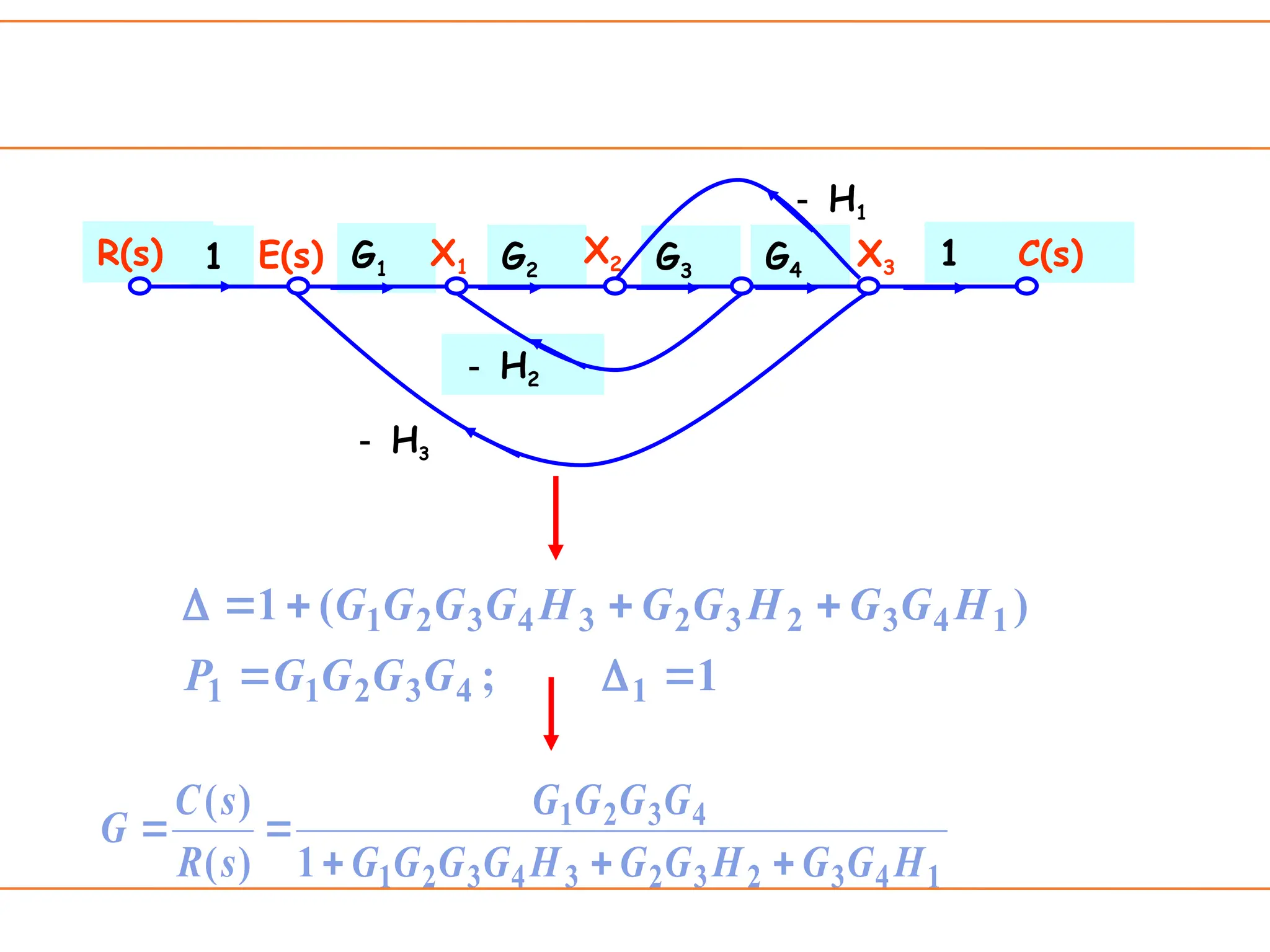
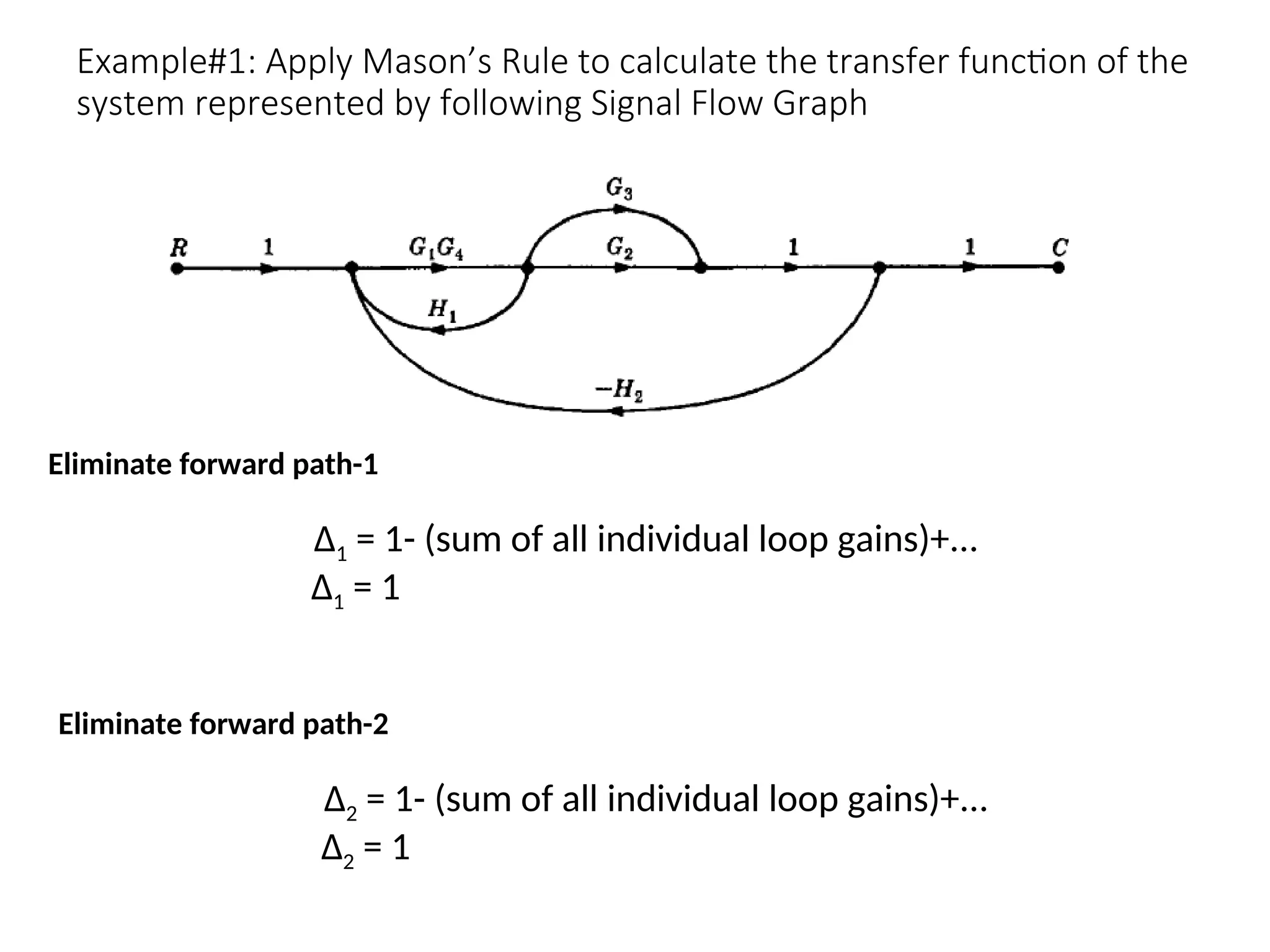
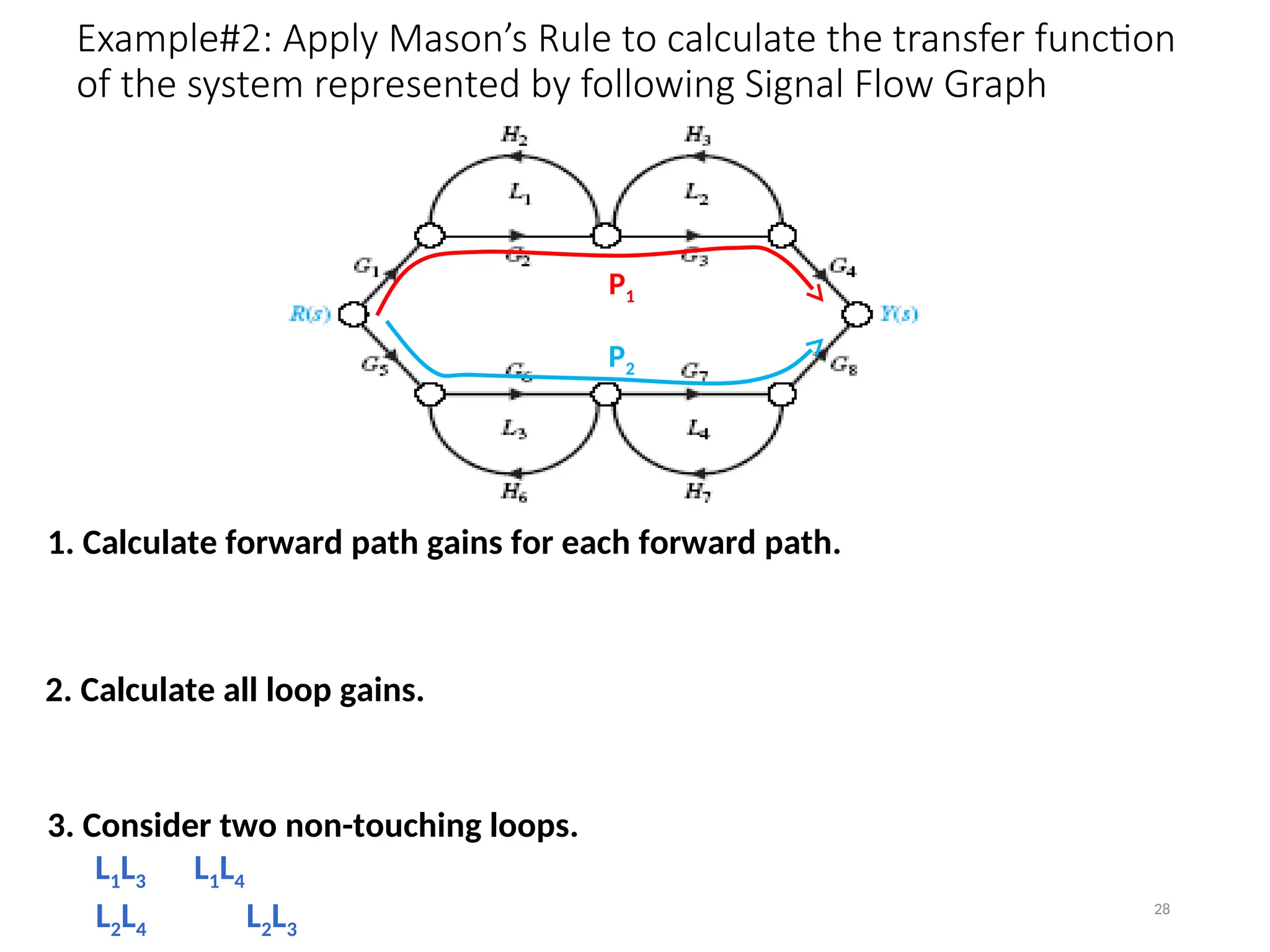
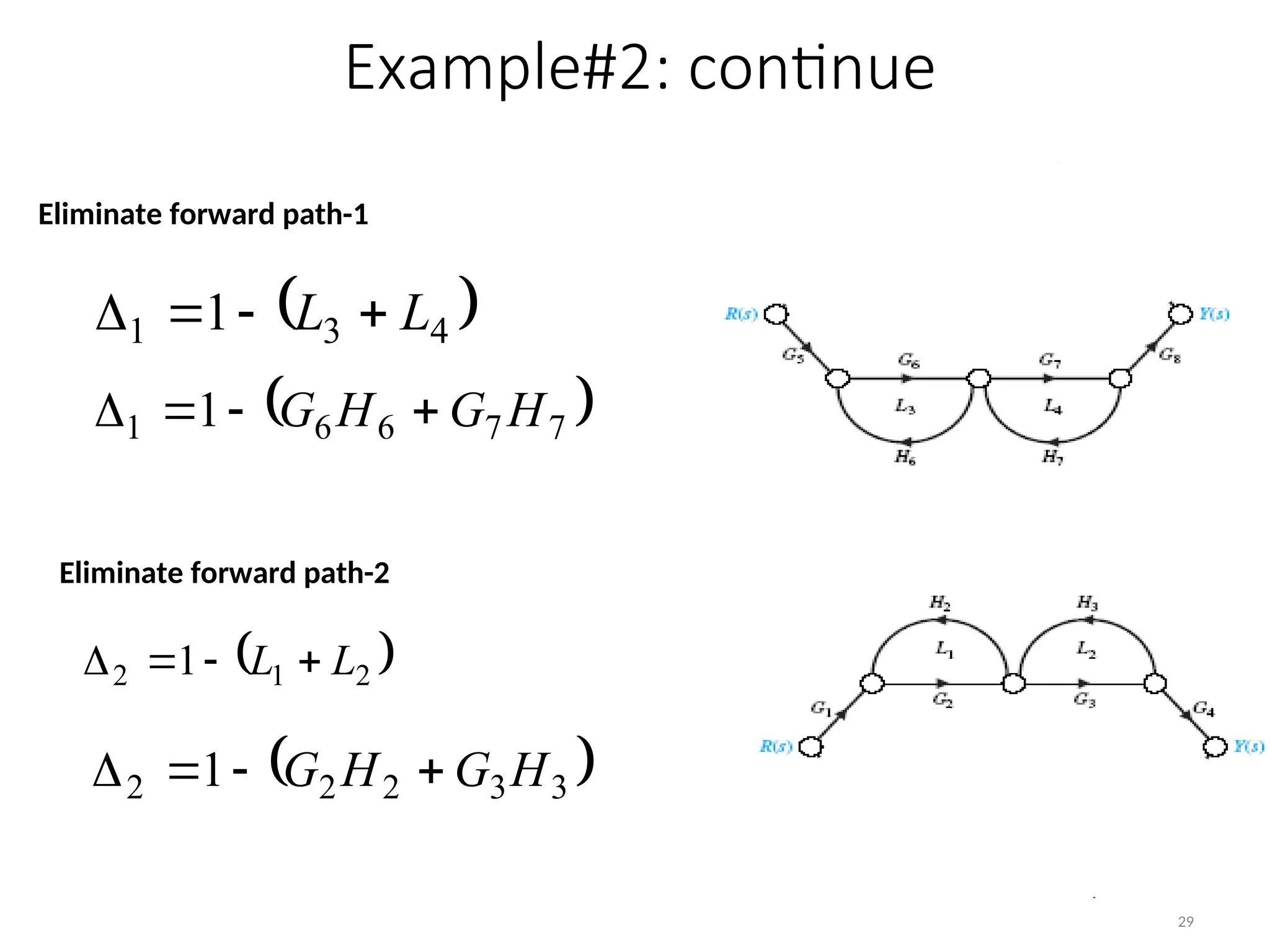
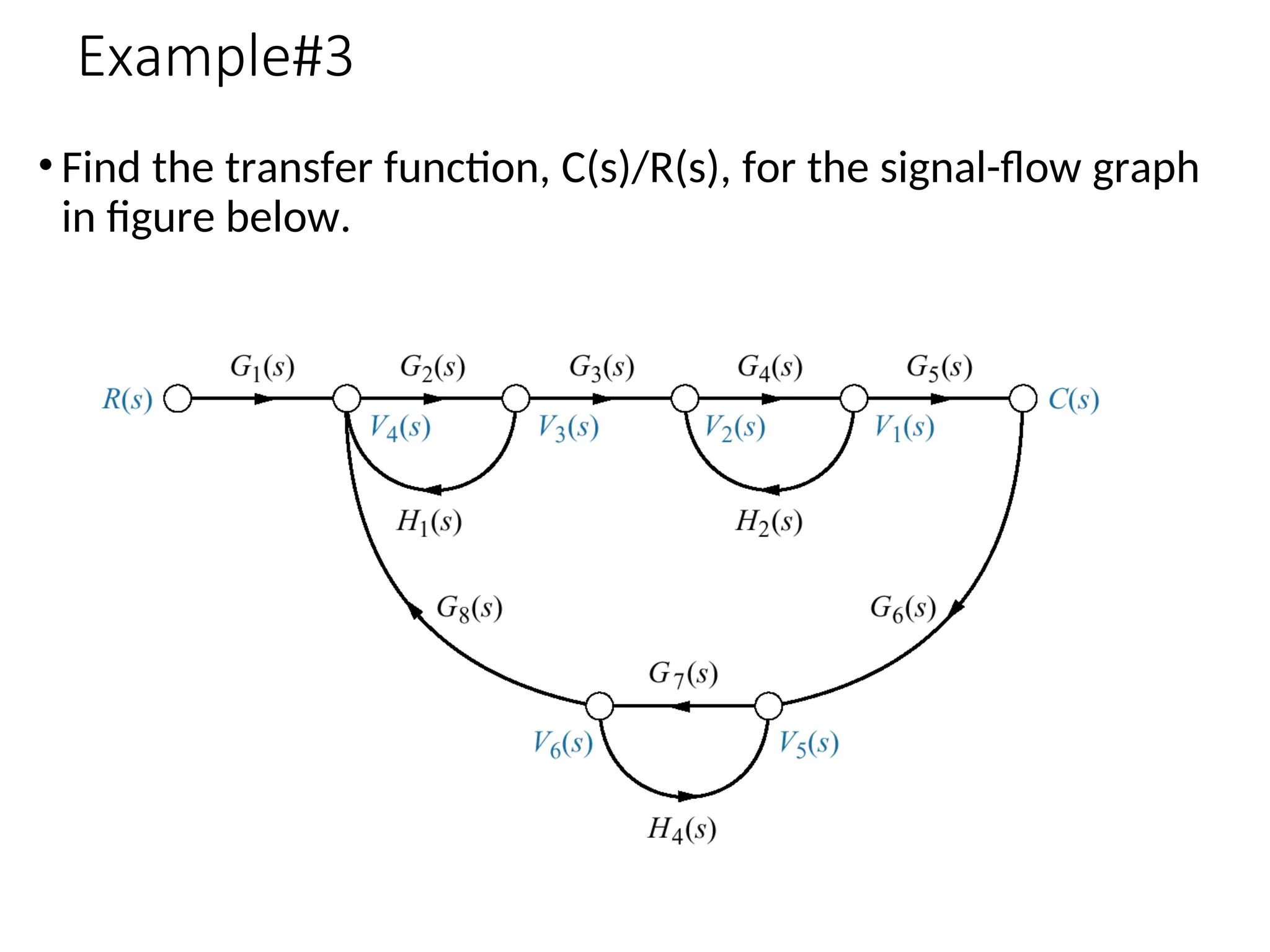
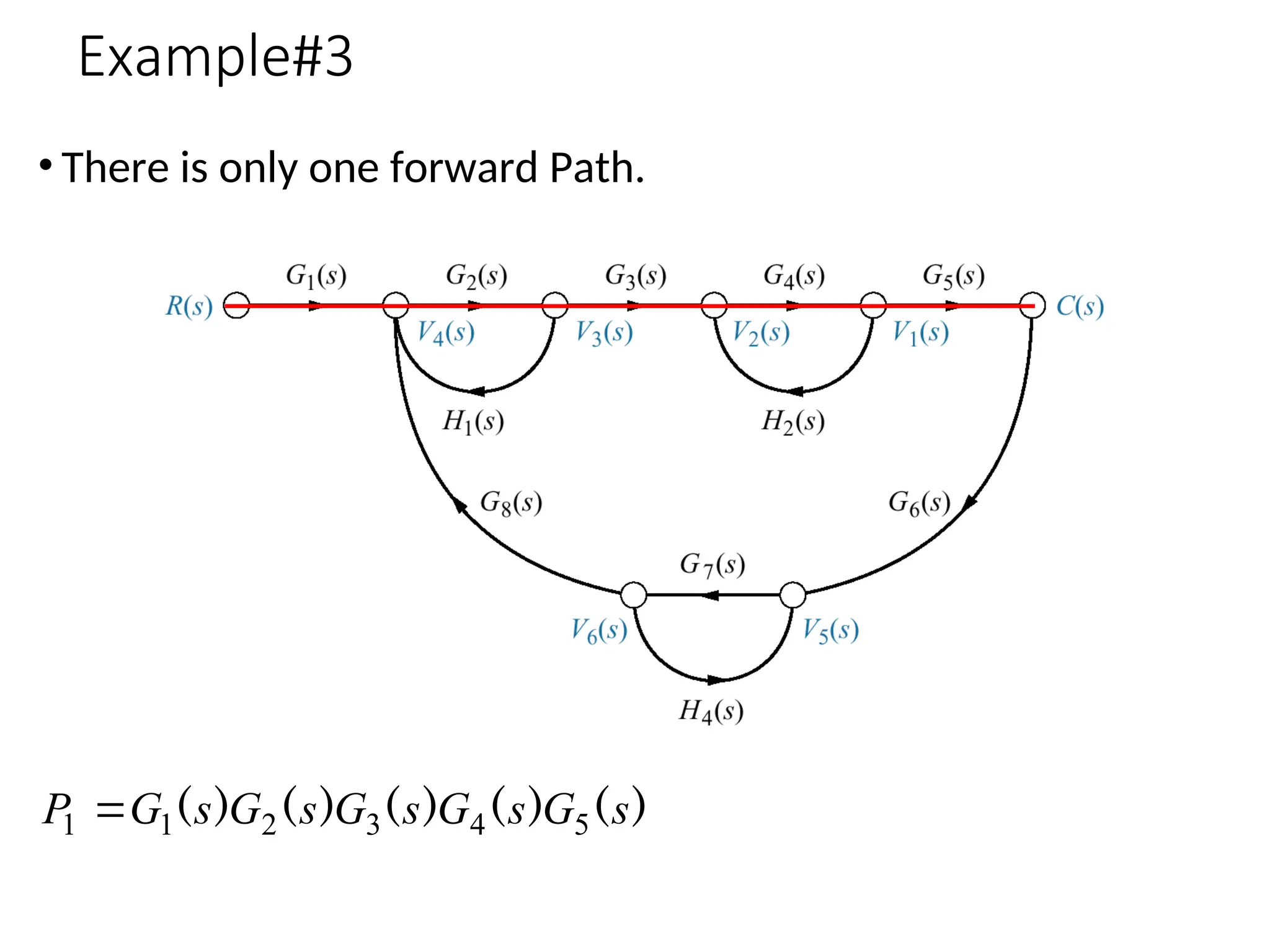
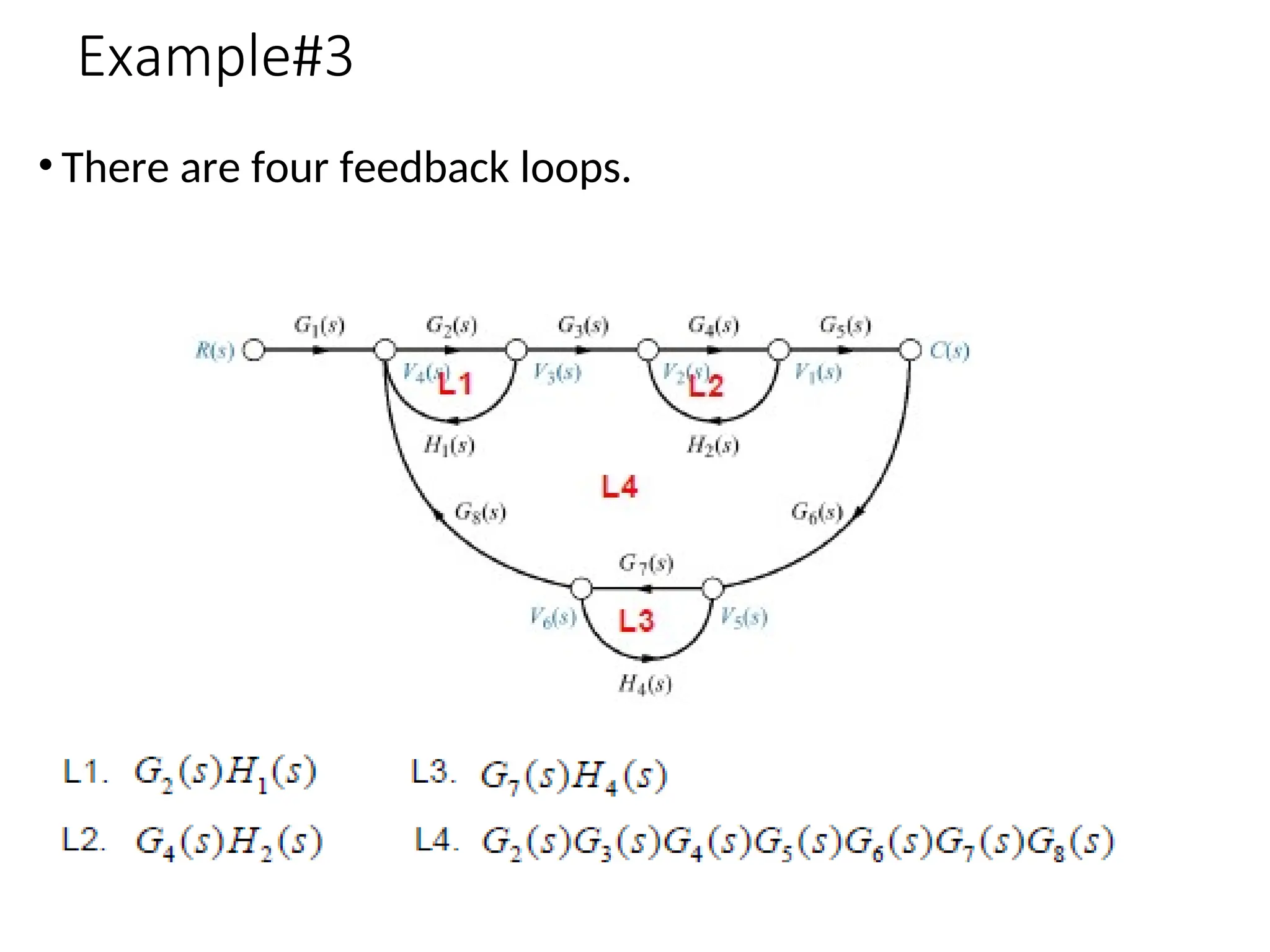
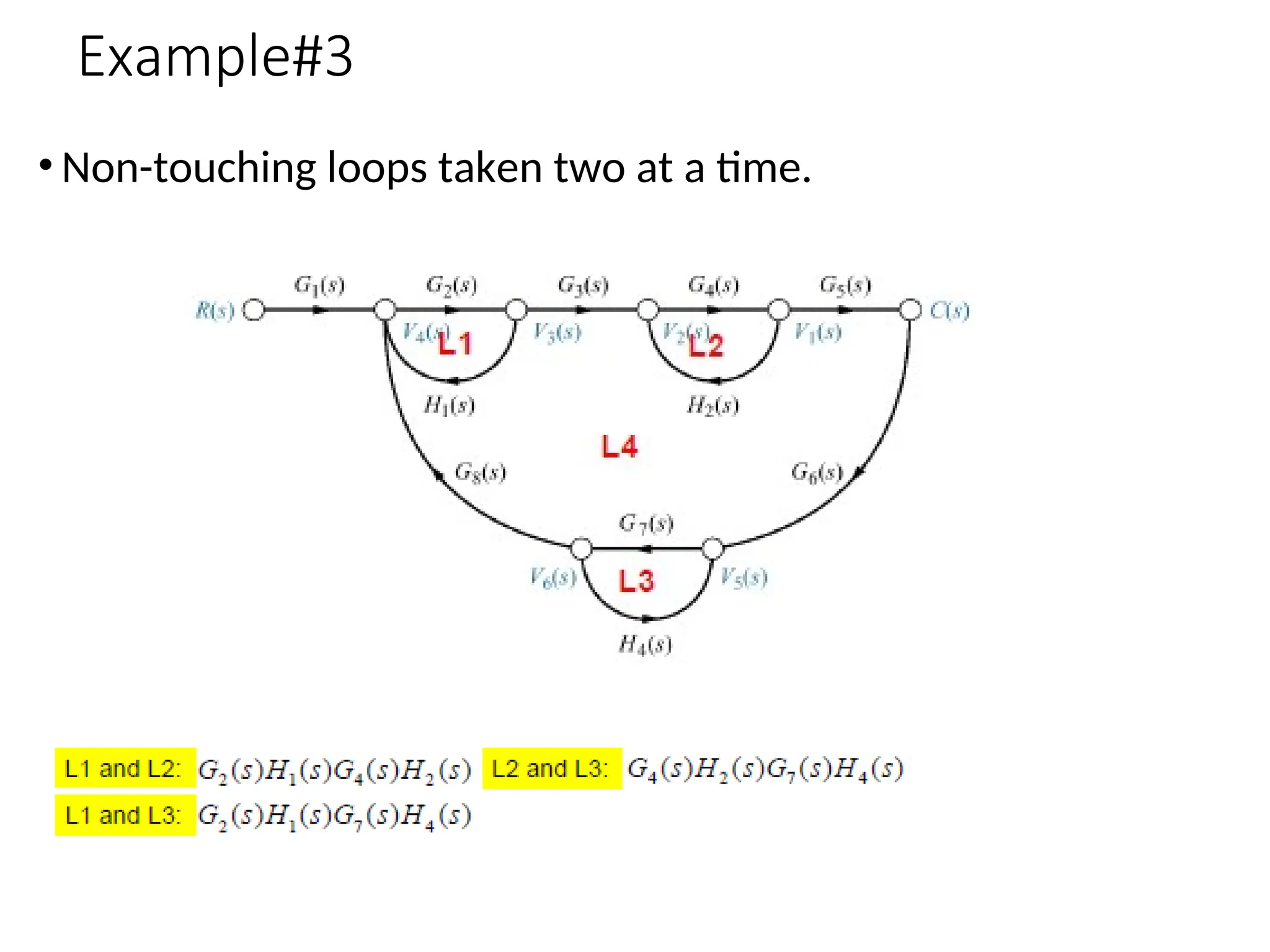
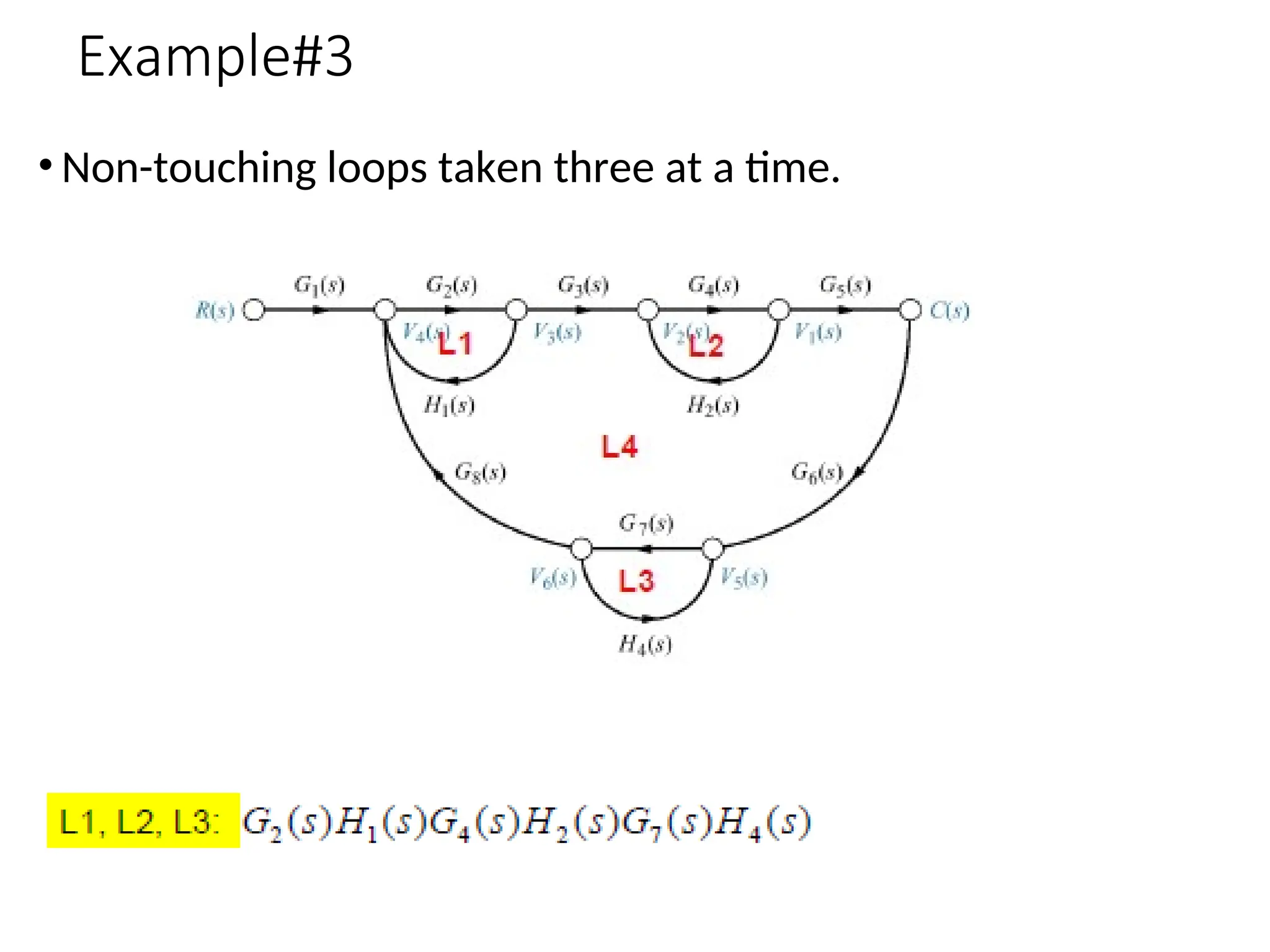
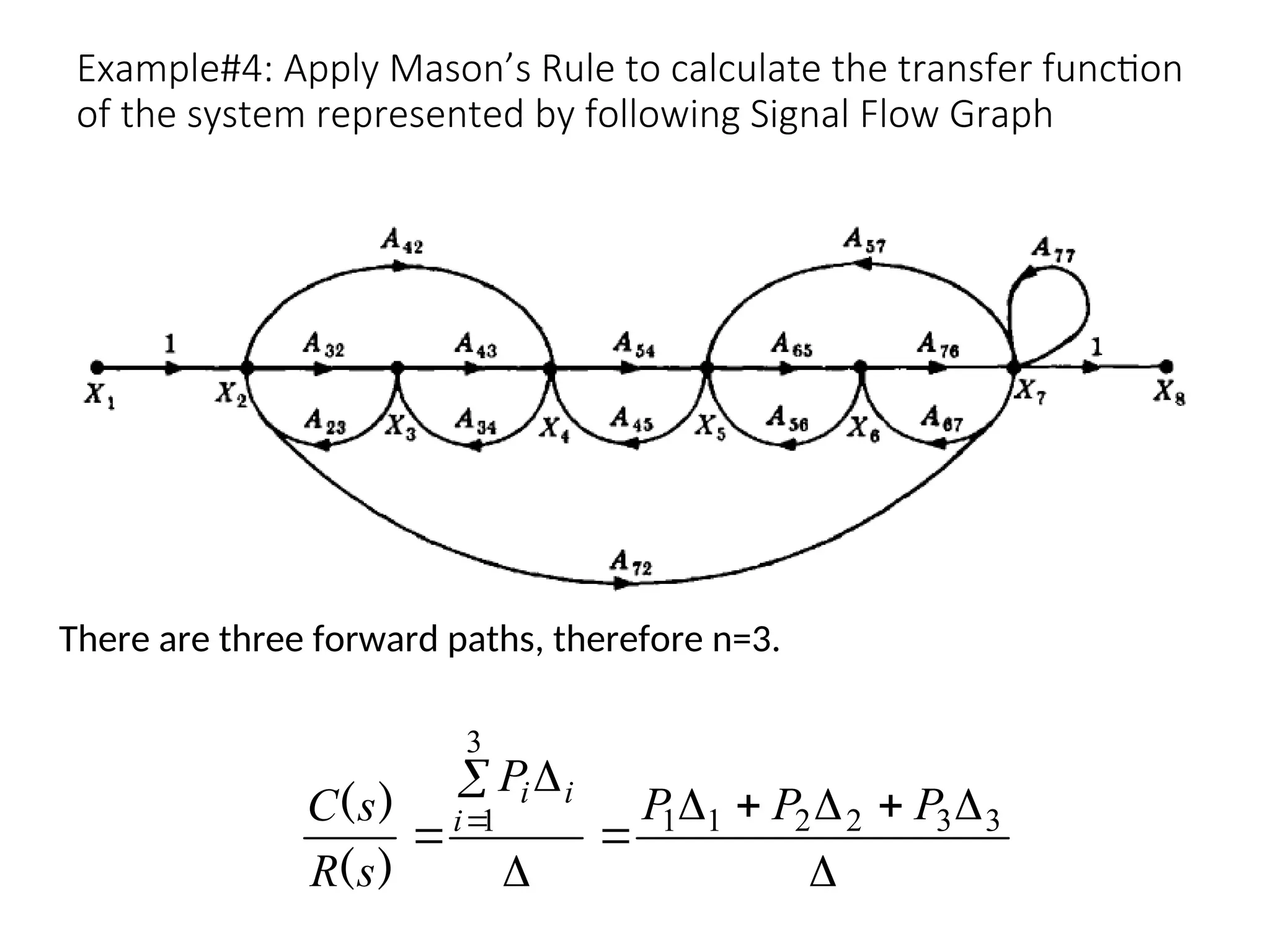
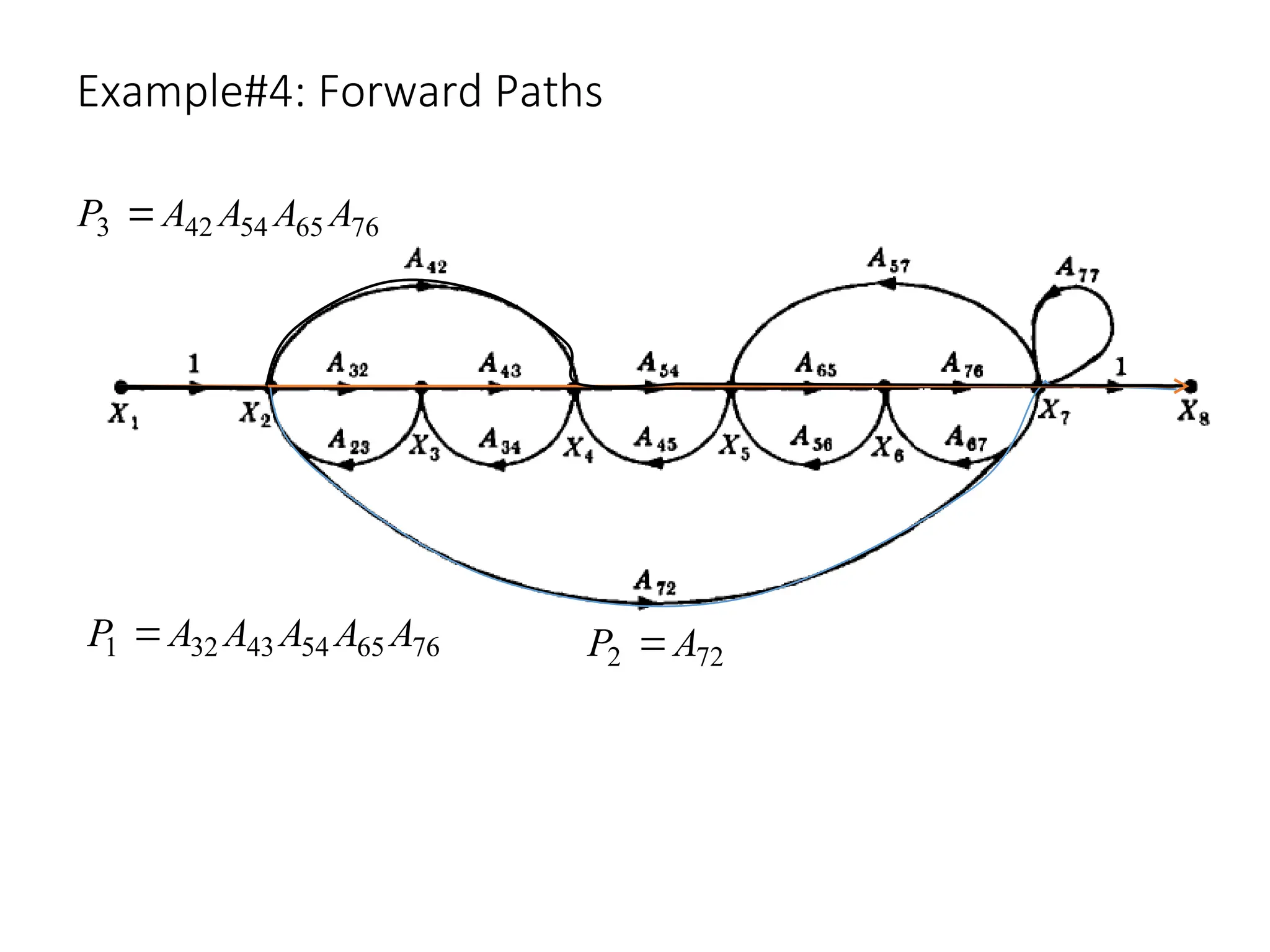
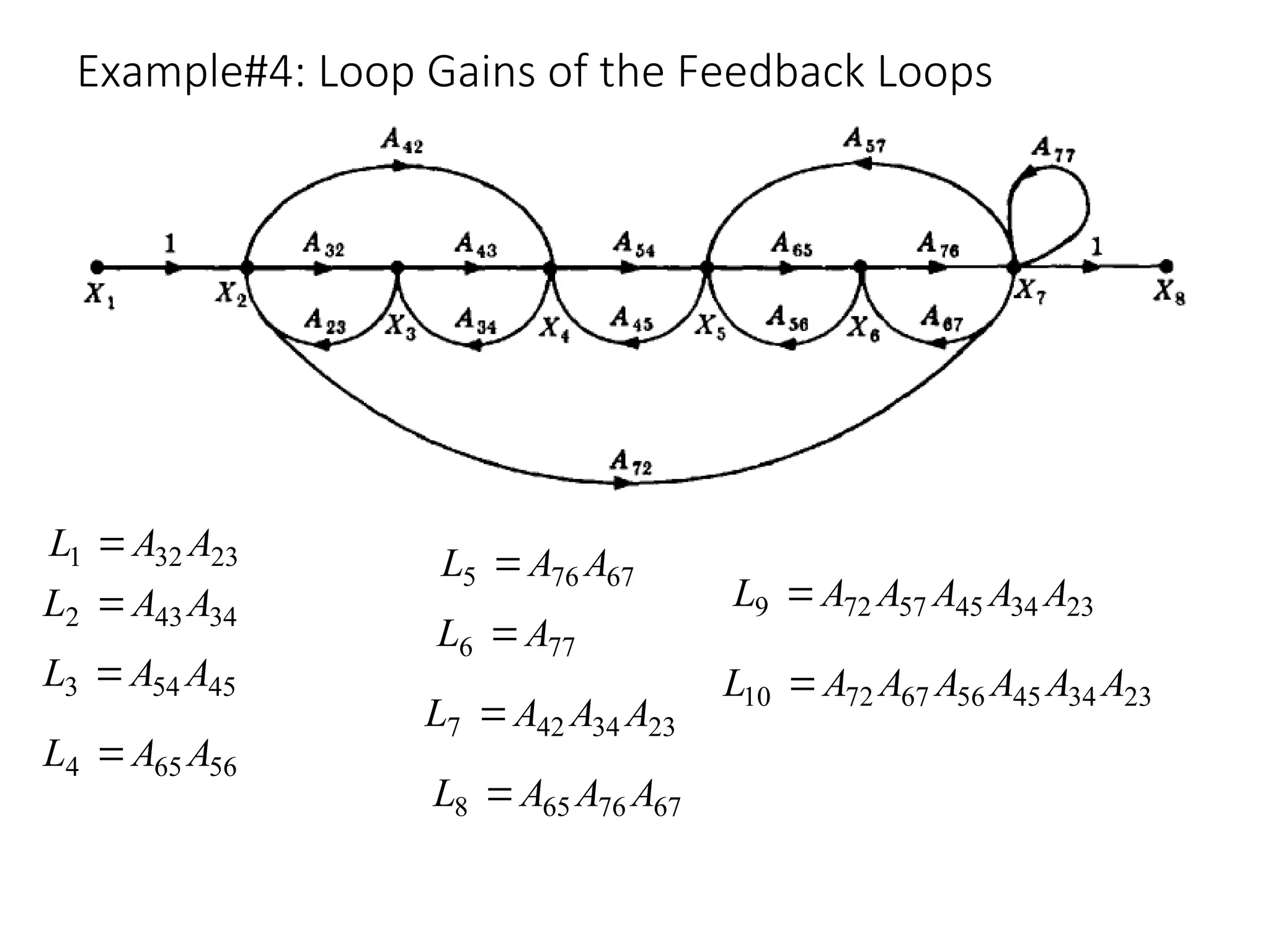
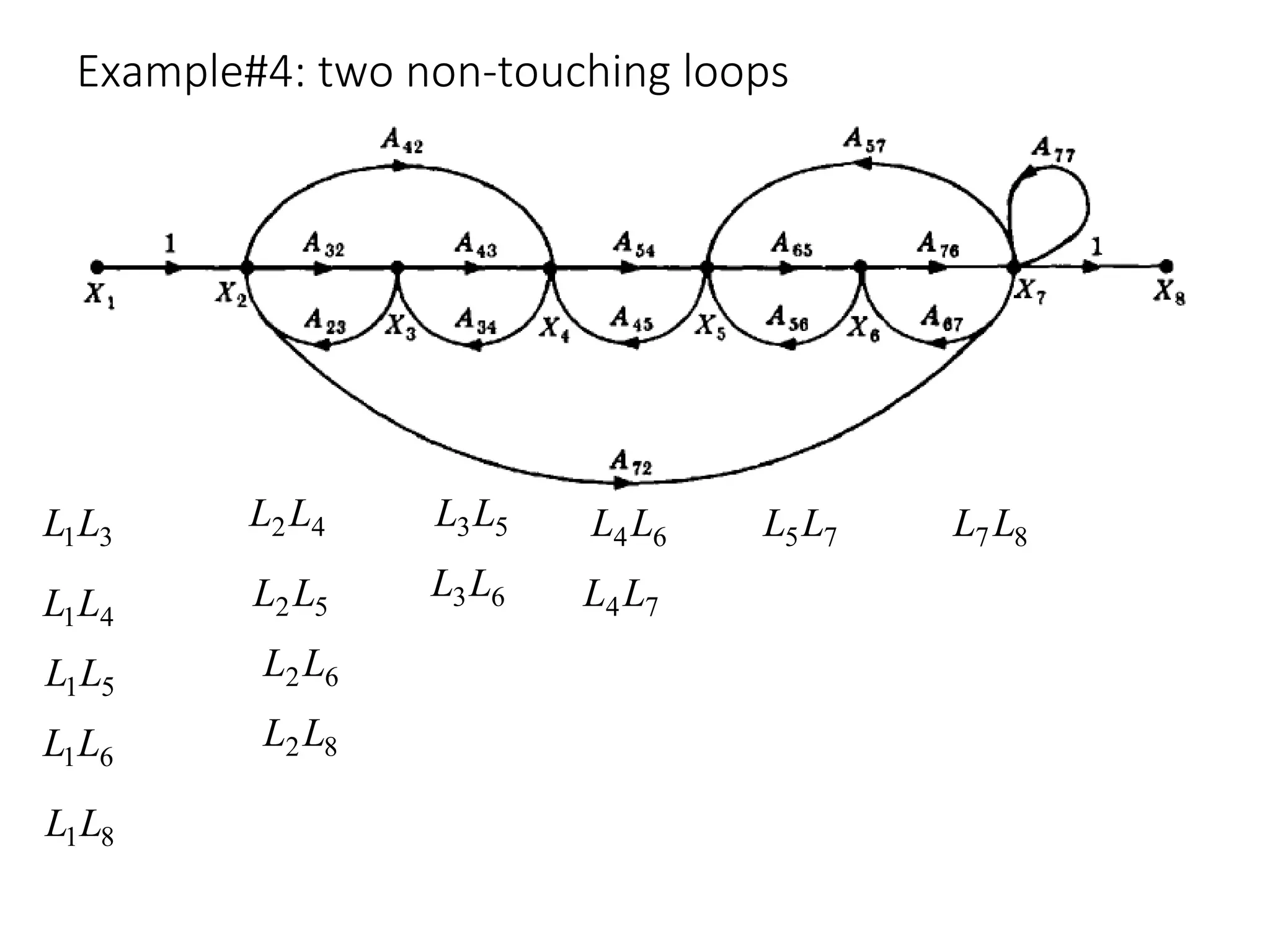
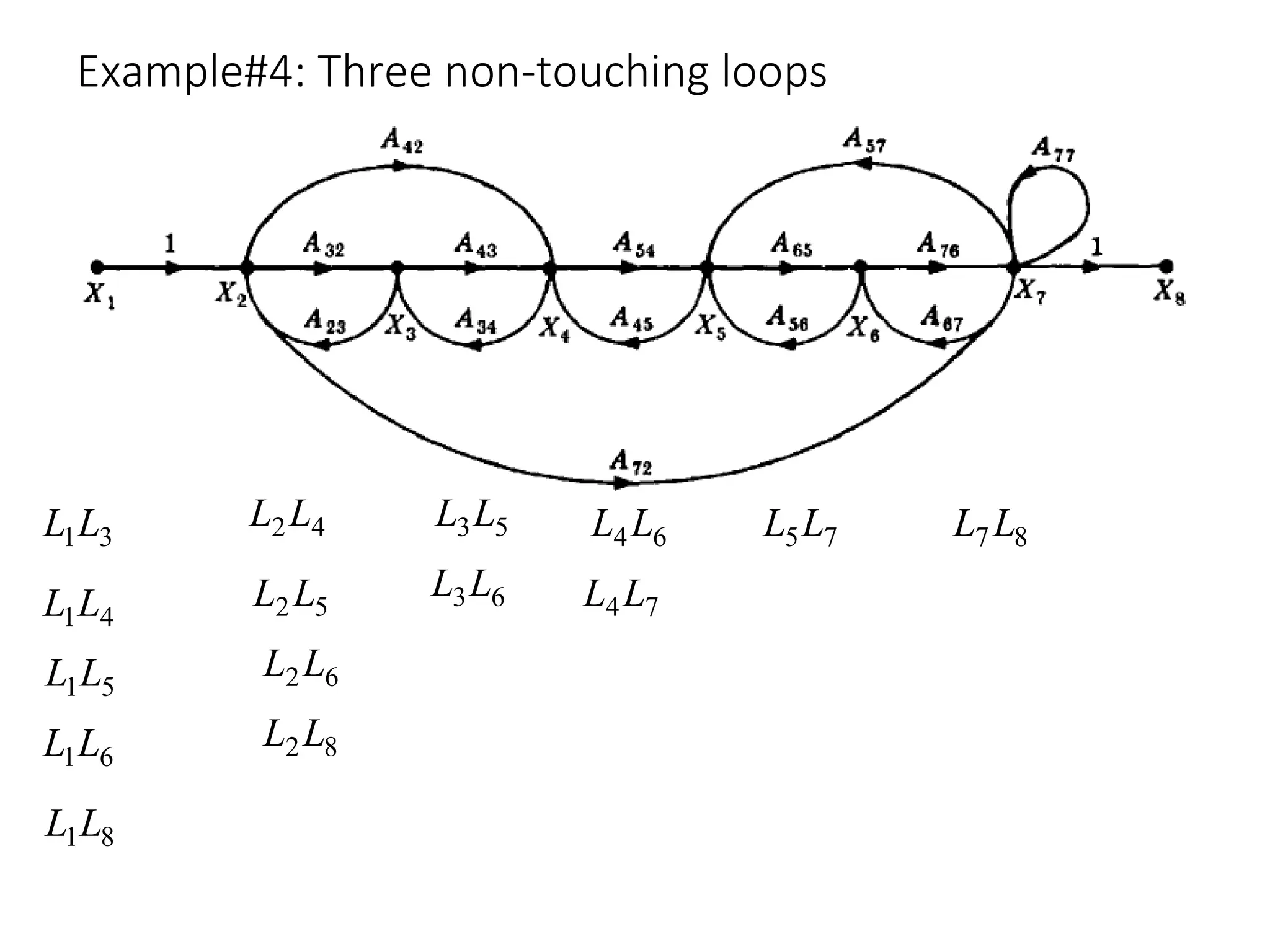
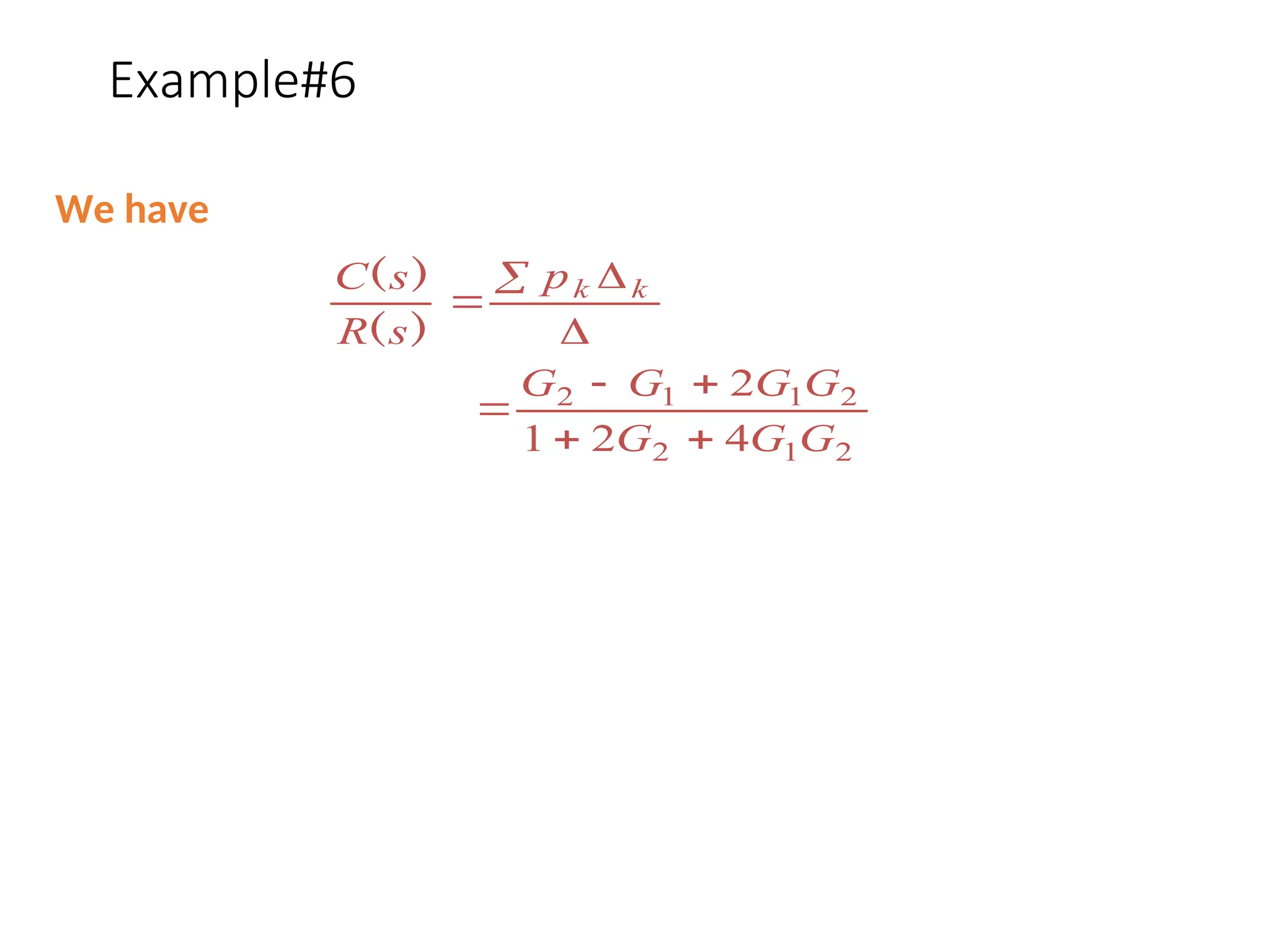
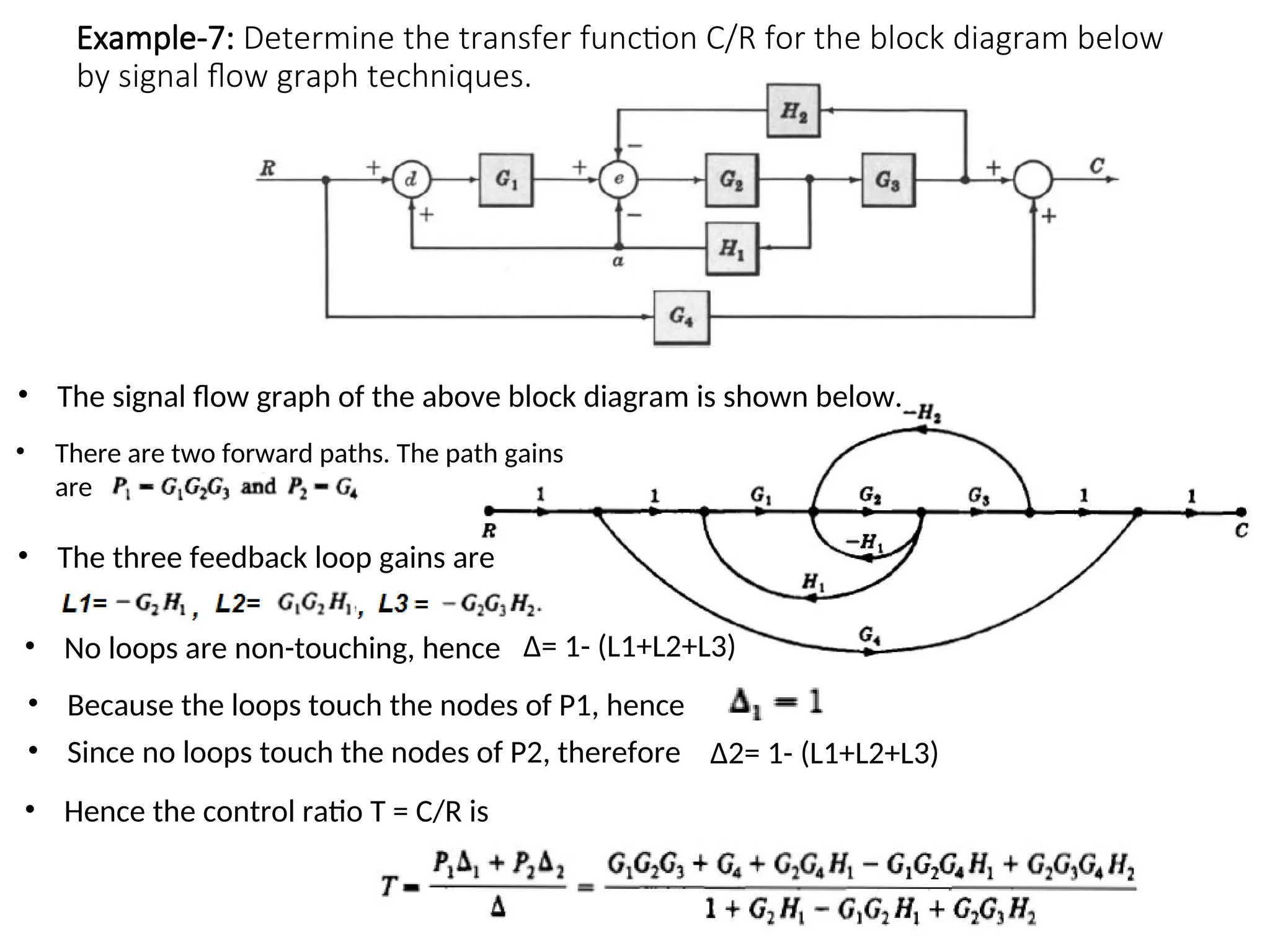
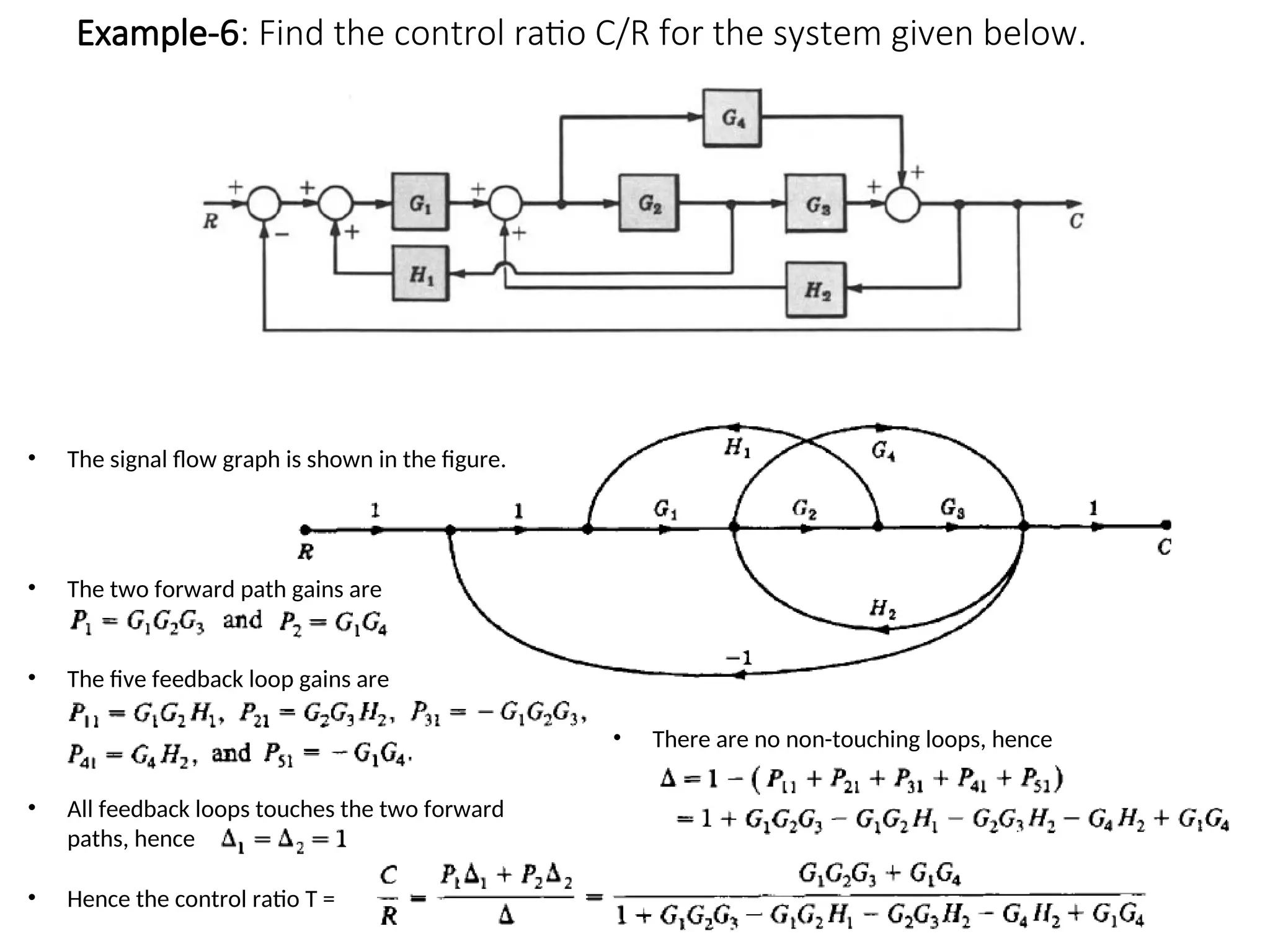
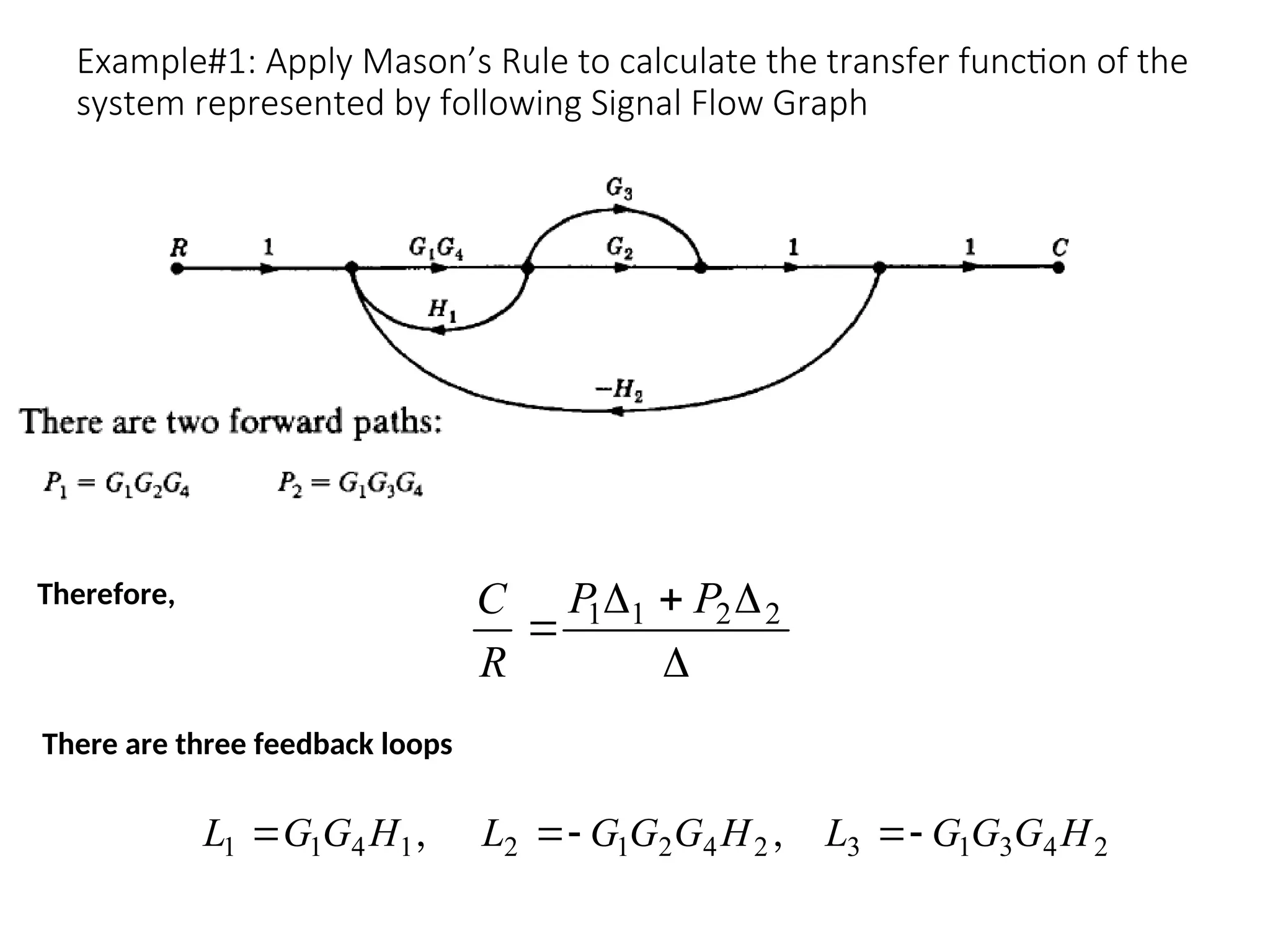
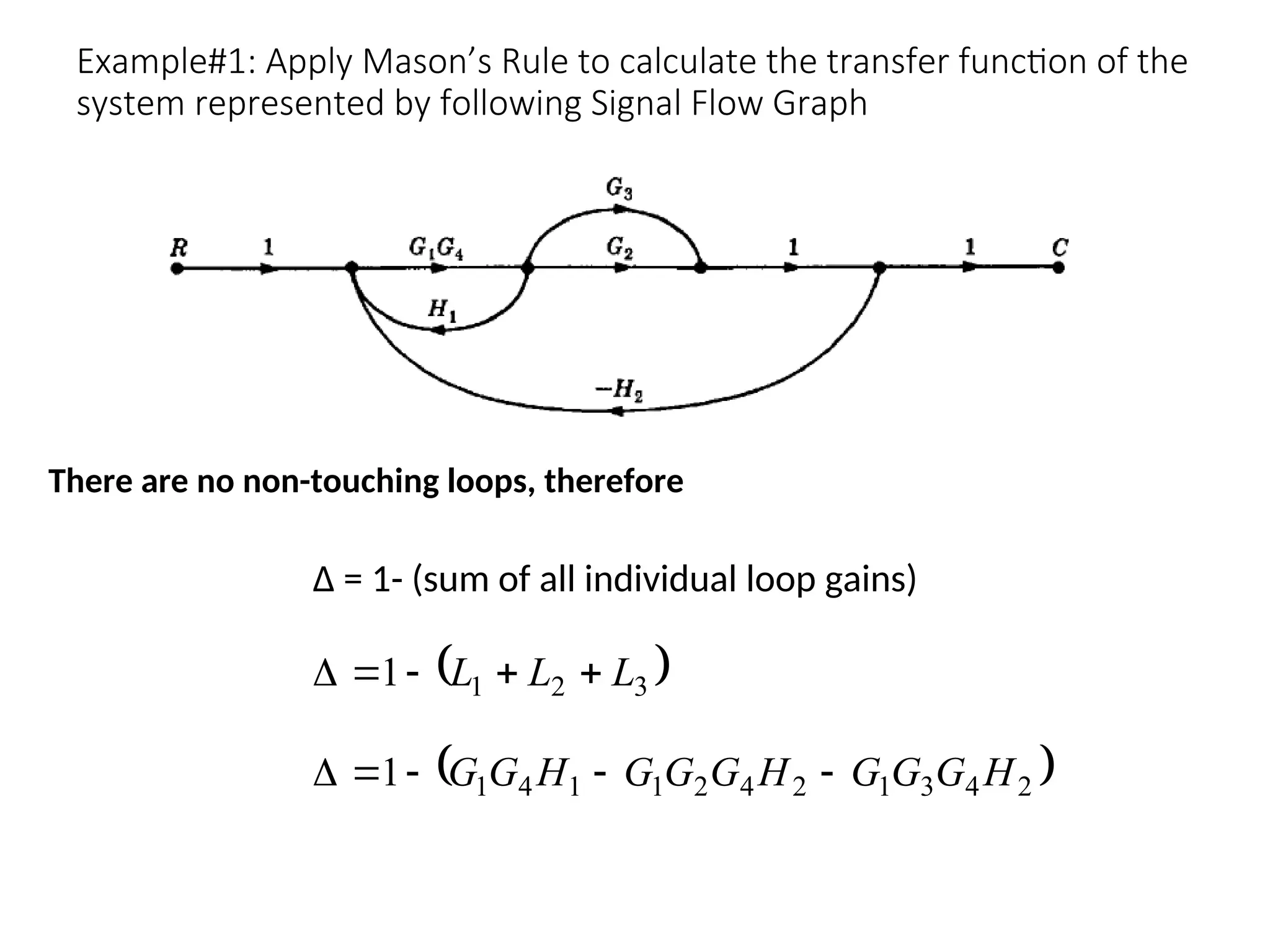
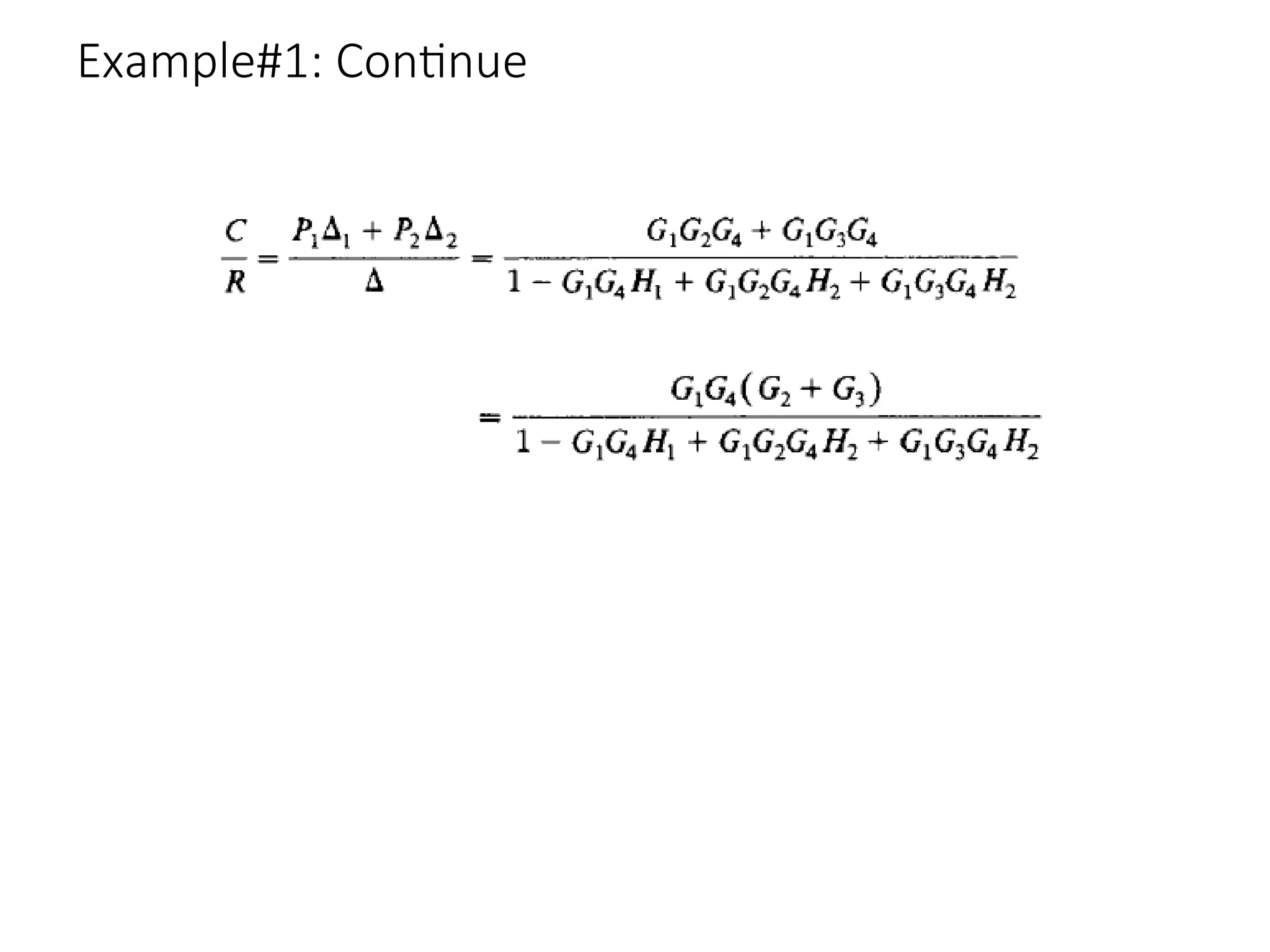
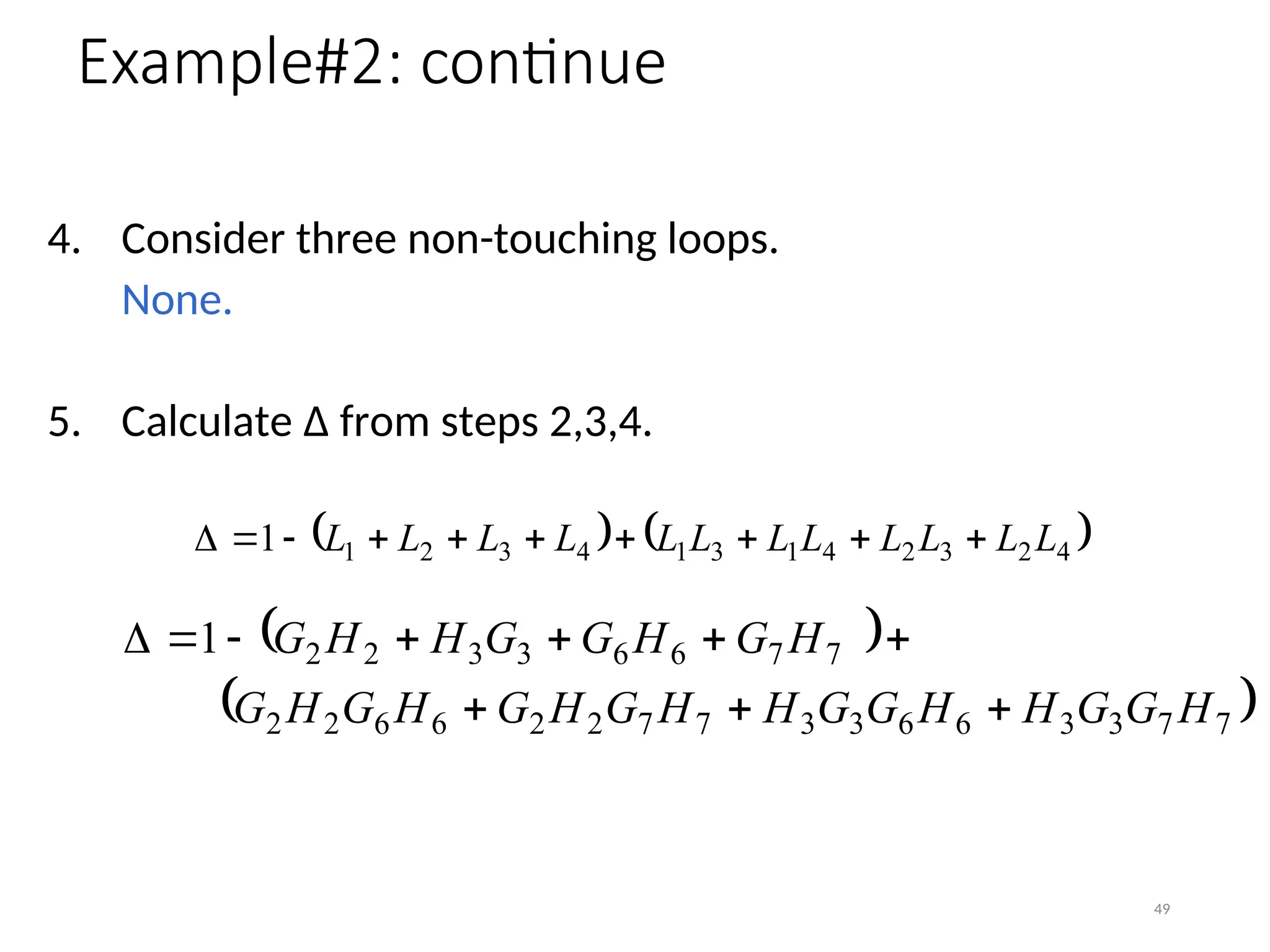
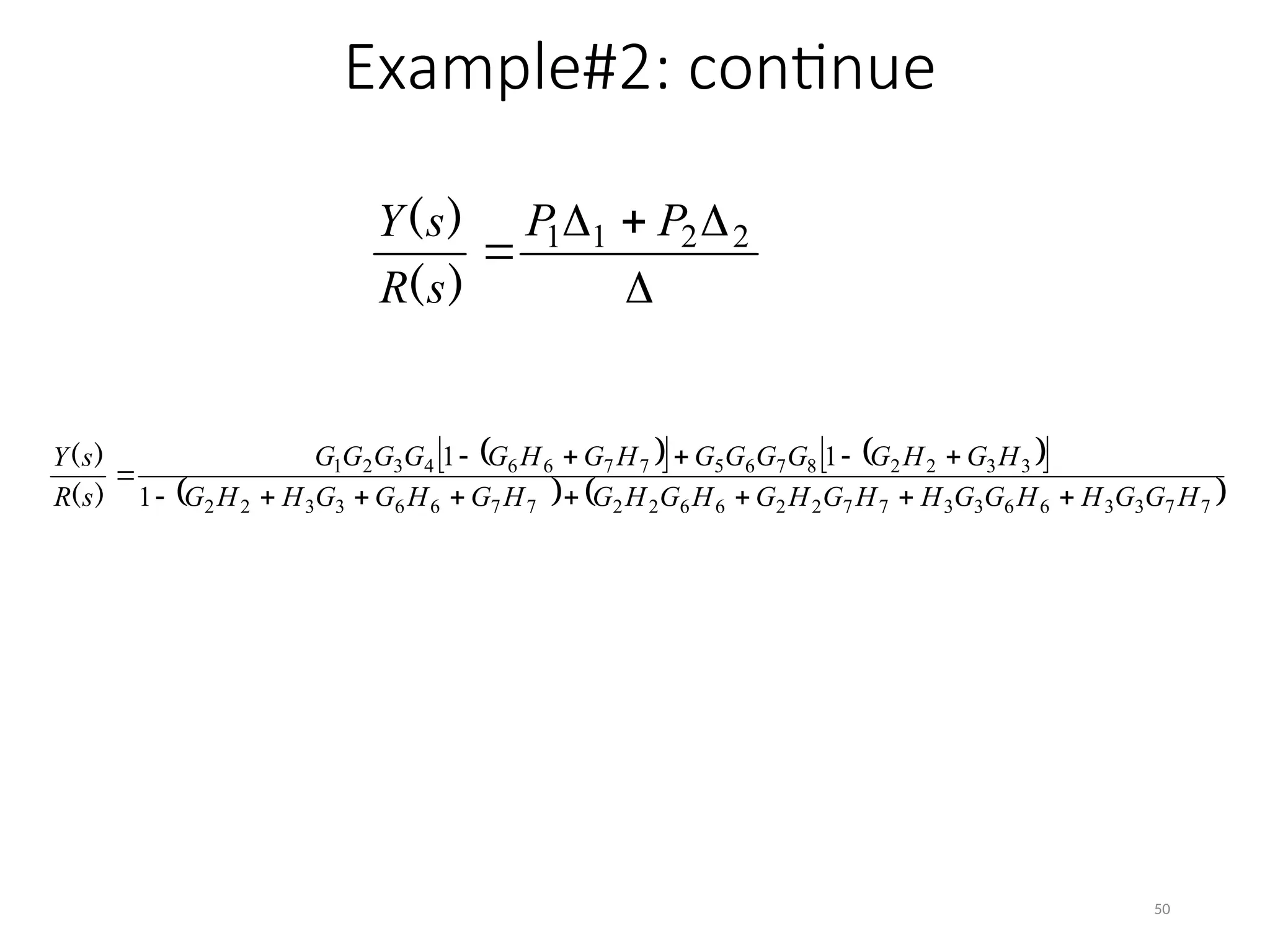
The document introduces signal flow graphs (SFG) as an alternative to block diagram representation in control engineering, explaining key concepts such as nodes, branches, and Mason's gain formula. It details the method for converting block diagrams to SFGs and provides multiple examples illustrating the application of Mason's rule for calculating transfer functions. Furthermore, it discusses important terminology related to paths and loops within the graphs, emphasizing the advantages of using SFGs for system analysis.