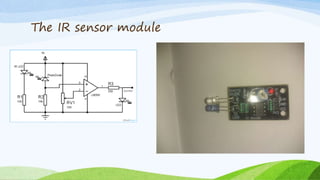
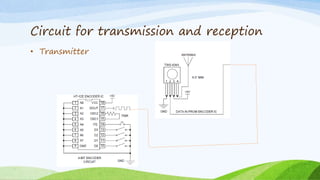
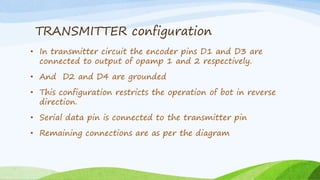
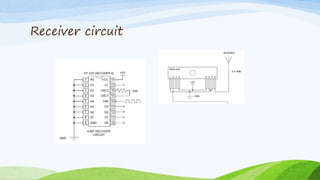
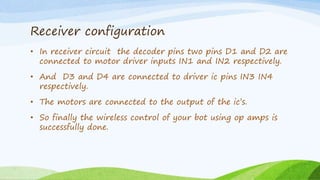
The document outlines a project focused on building cost-effective autonomous robots, including line followers, obstacle detectors, and light followers, using basic components like microcontrollers, IR sensors, and ultrasonic sensors. It presents the advantages and disadvantages of these designs, including simplicity and low cost, while noting limitations like their inability to navigate complex paths. Additionally, the document describes a wireless light-controlled bot configuration utilizing RF transmission and op-amps for control.