Downloaded 327 times

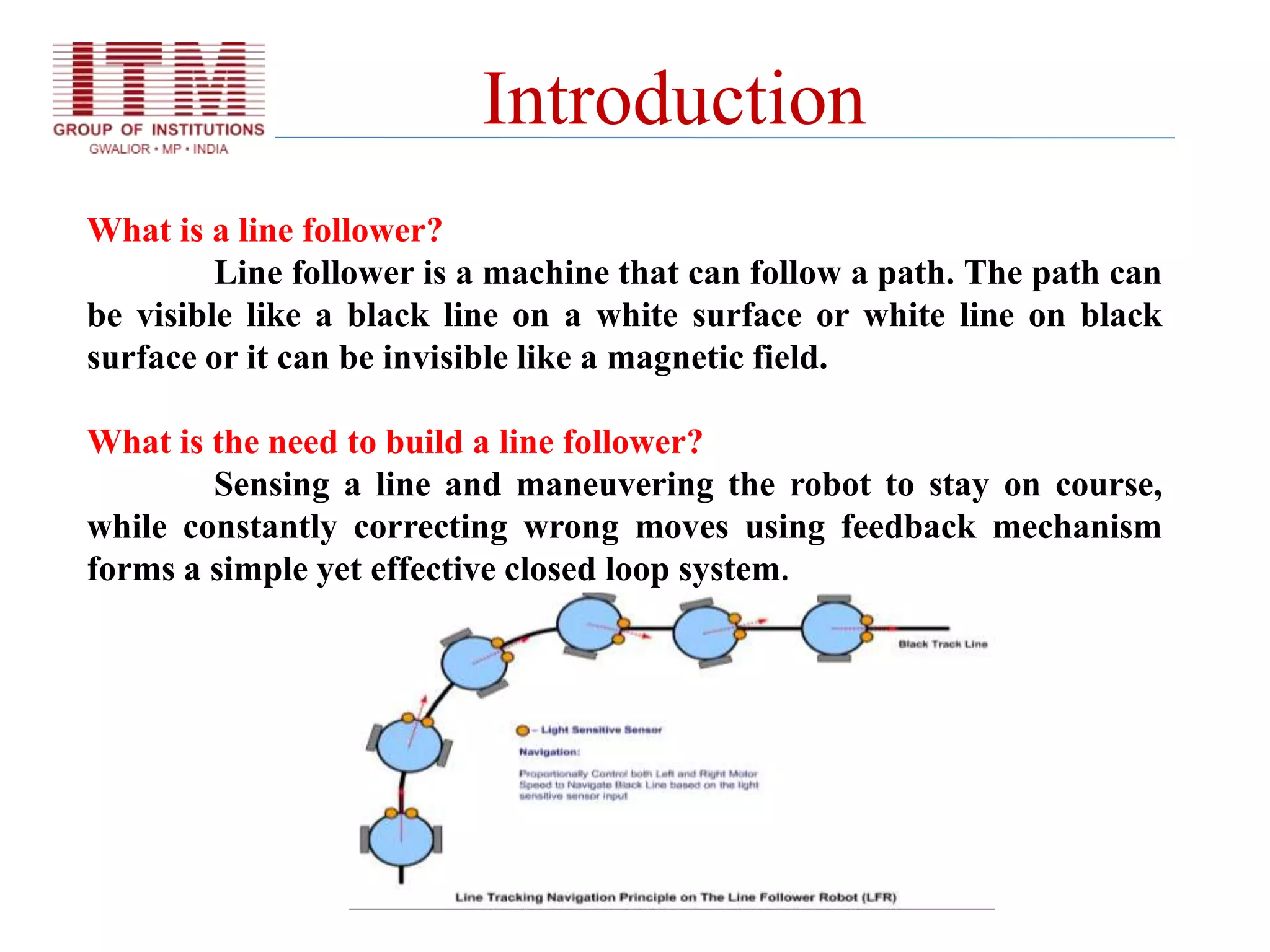


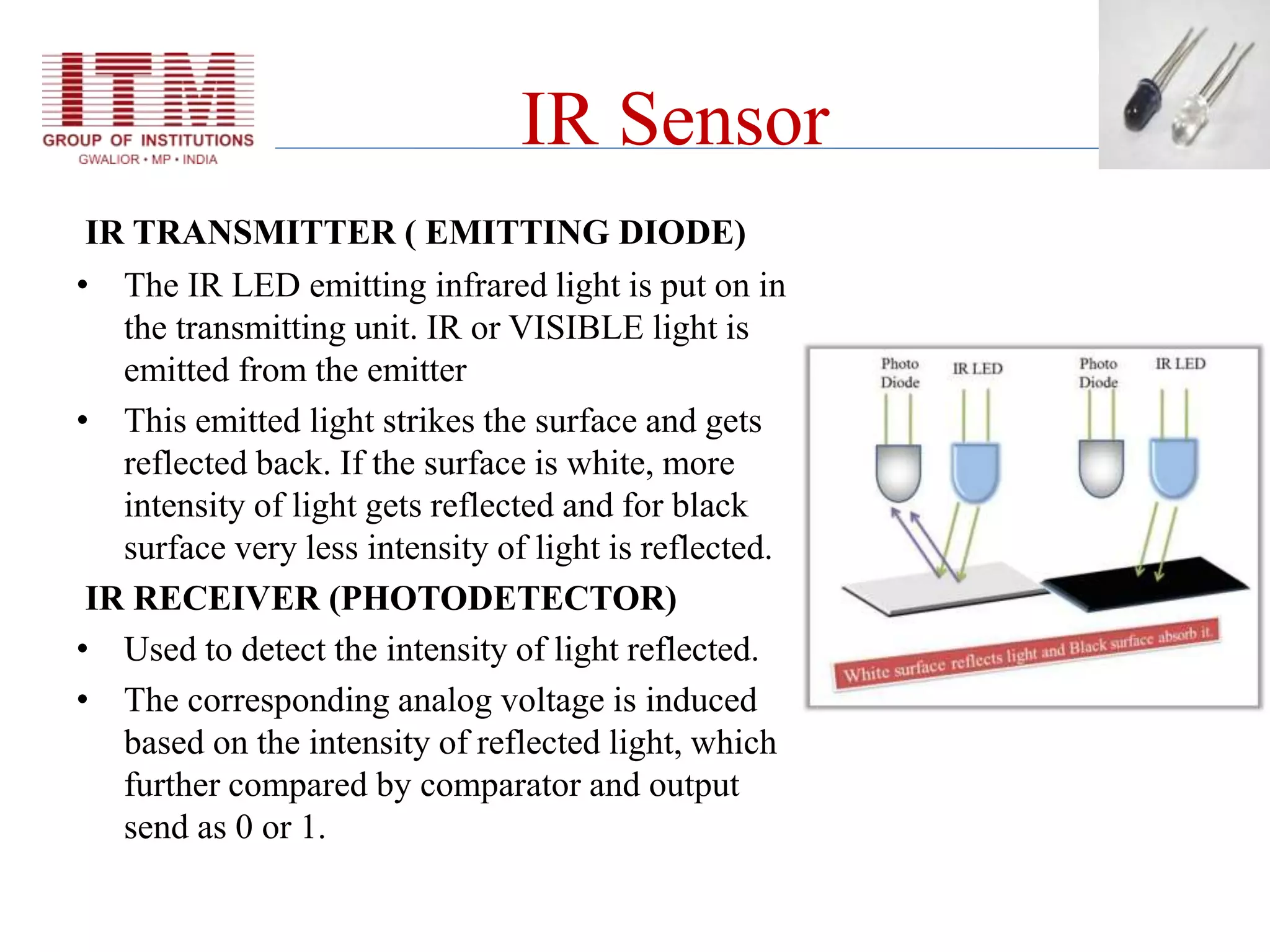





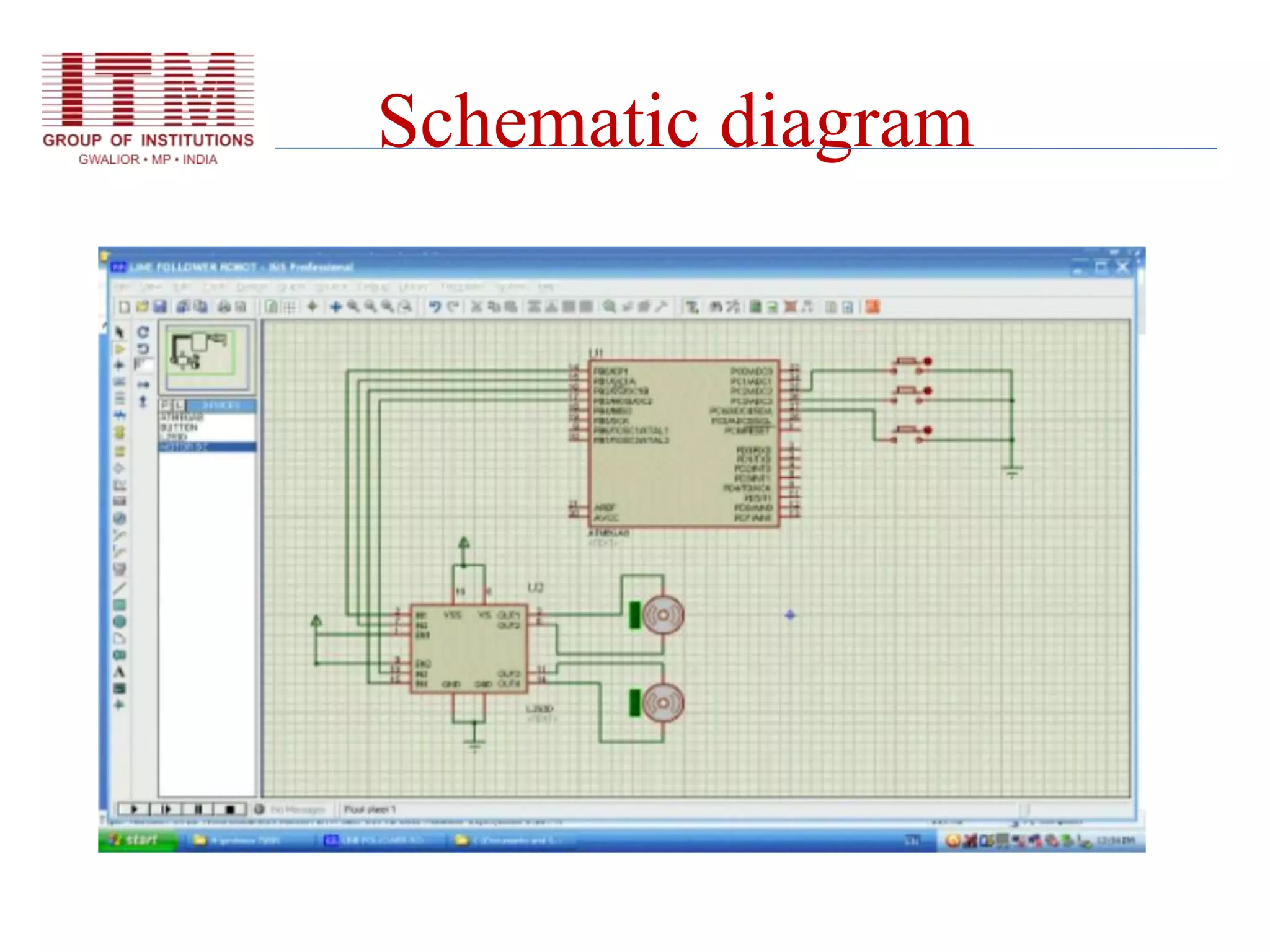

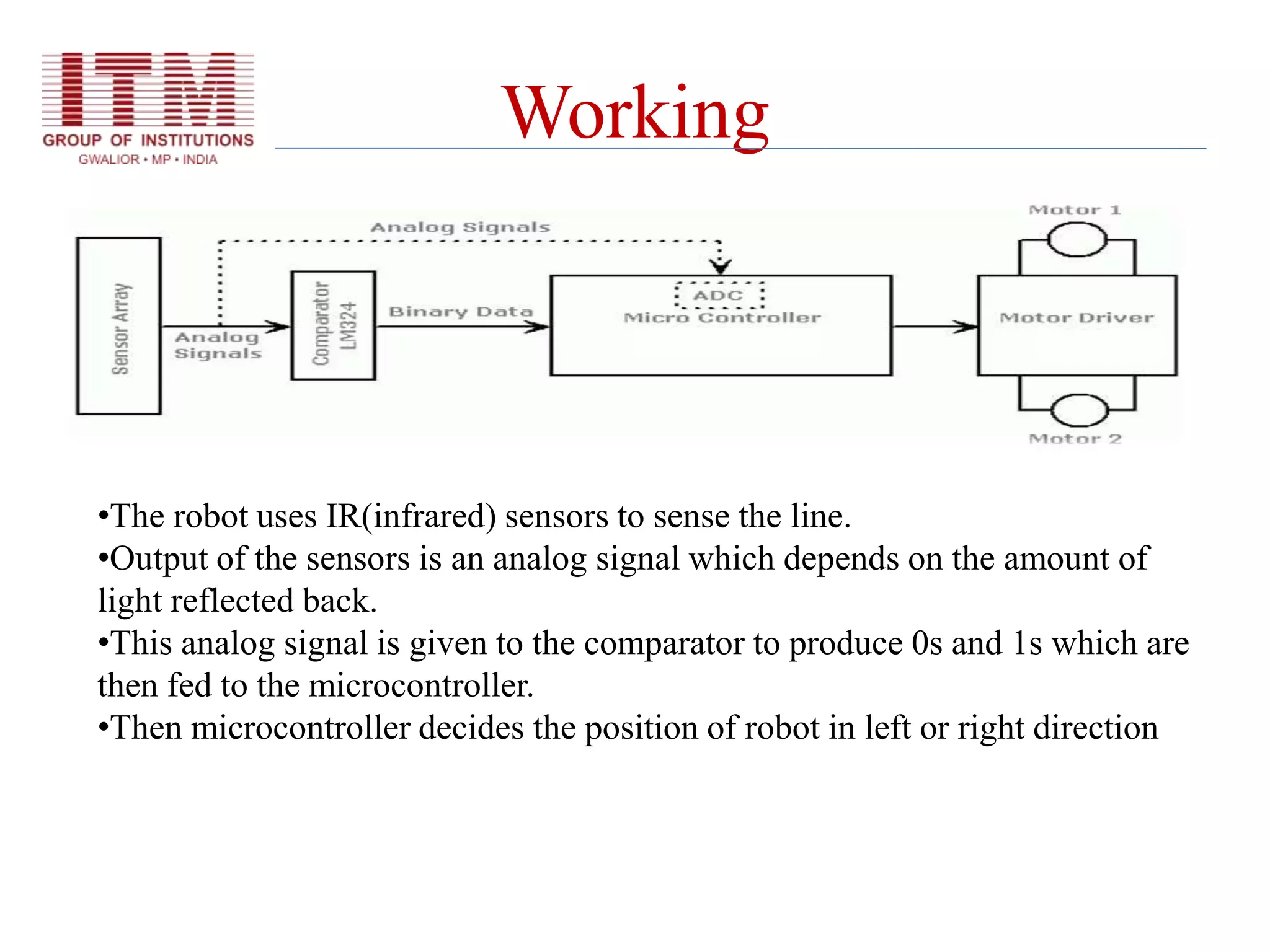







This document is a teacher guide for constructing a line follower robot, detailing its components, working principles, and potential applications. It outlines the use of IR sensors, microcontrollers, and motor drivers to enable the robot to navigate following a designated path. The guide concludes with potential future advancements in line-following technology, including its application in autonomous vehicles.























































































