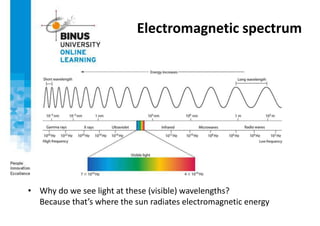
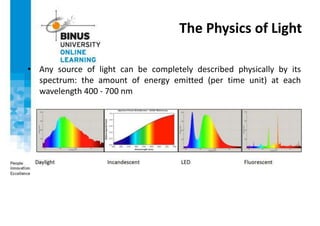
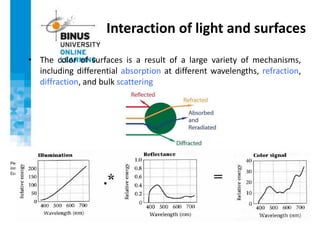
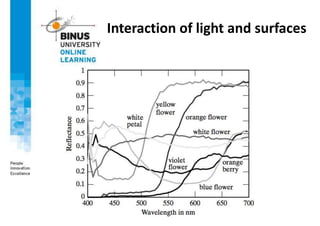
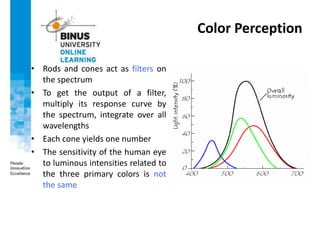
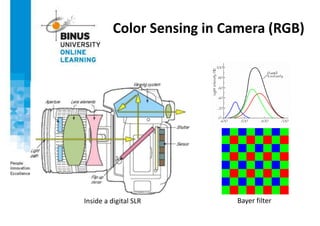
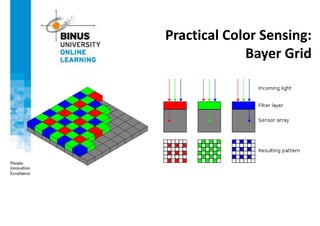
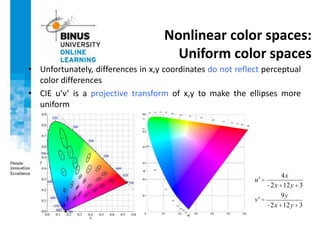
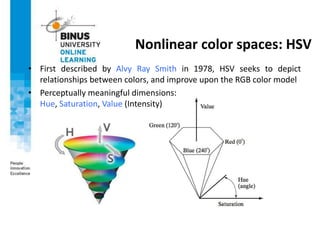
This document provides an overview of light, color, and human color perception. It discusses that color is a psychological property resulting from light interacting with our visual system. The physics of light is described in terms of wavelength. Human color vision involves three types of cones that differ in photopigment sensitivity. Color can be represented using models like RGB, CIE XYZ, and HSV. Computer vision applications make use of color through techniques like color histograms, skin detection, and image segmentation.