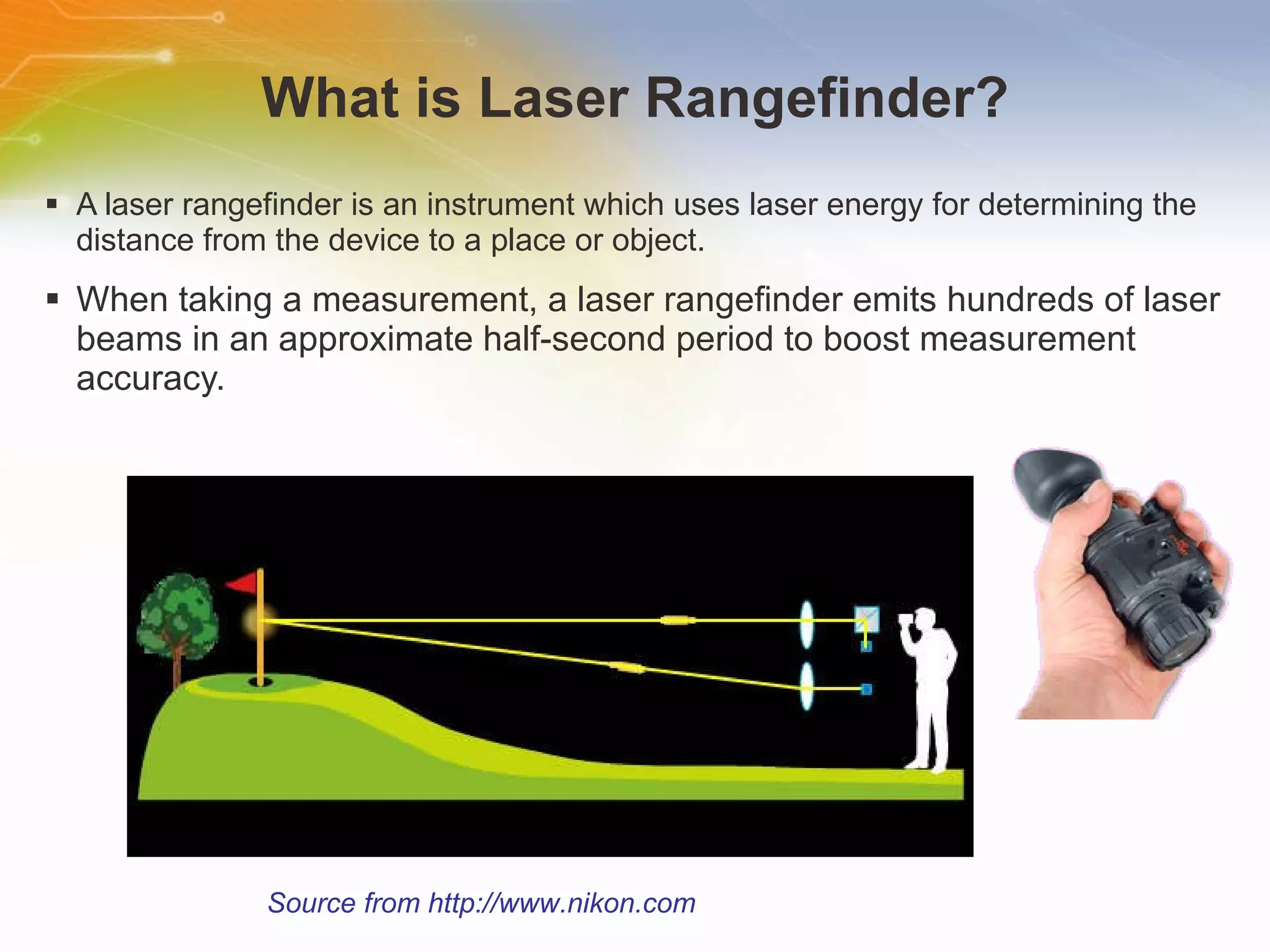
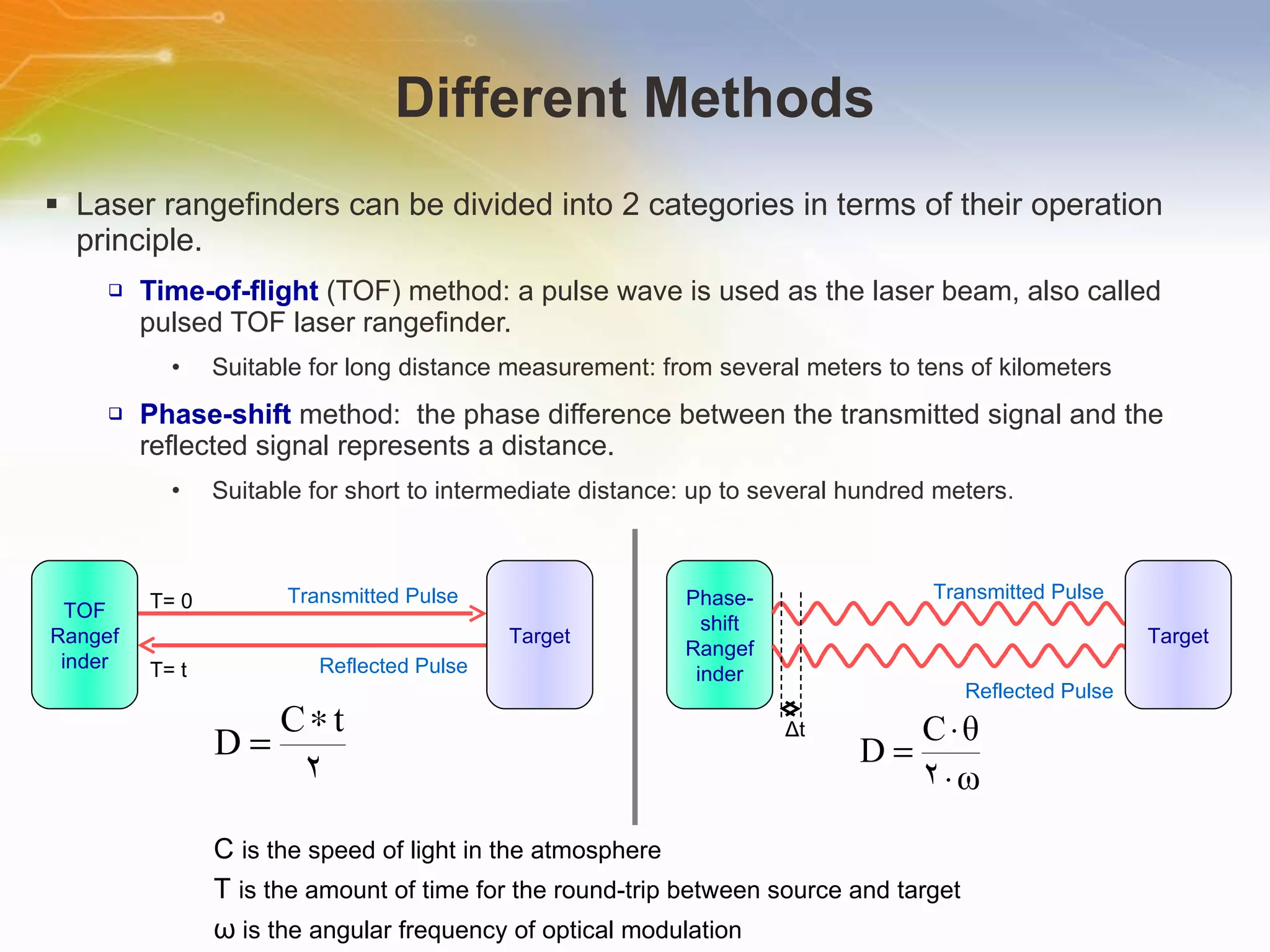
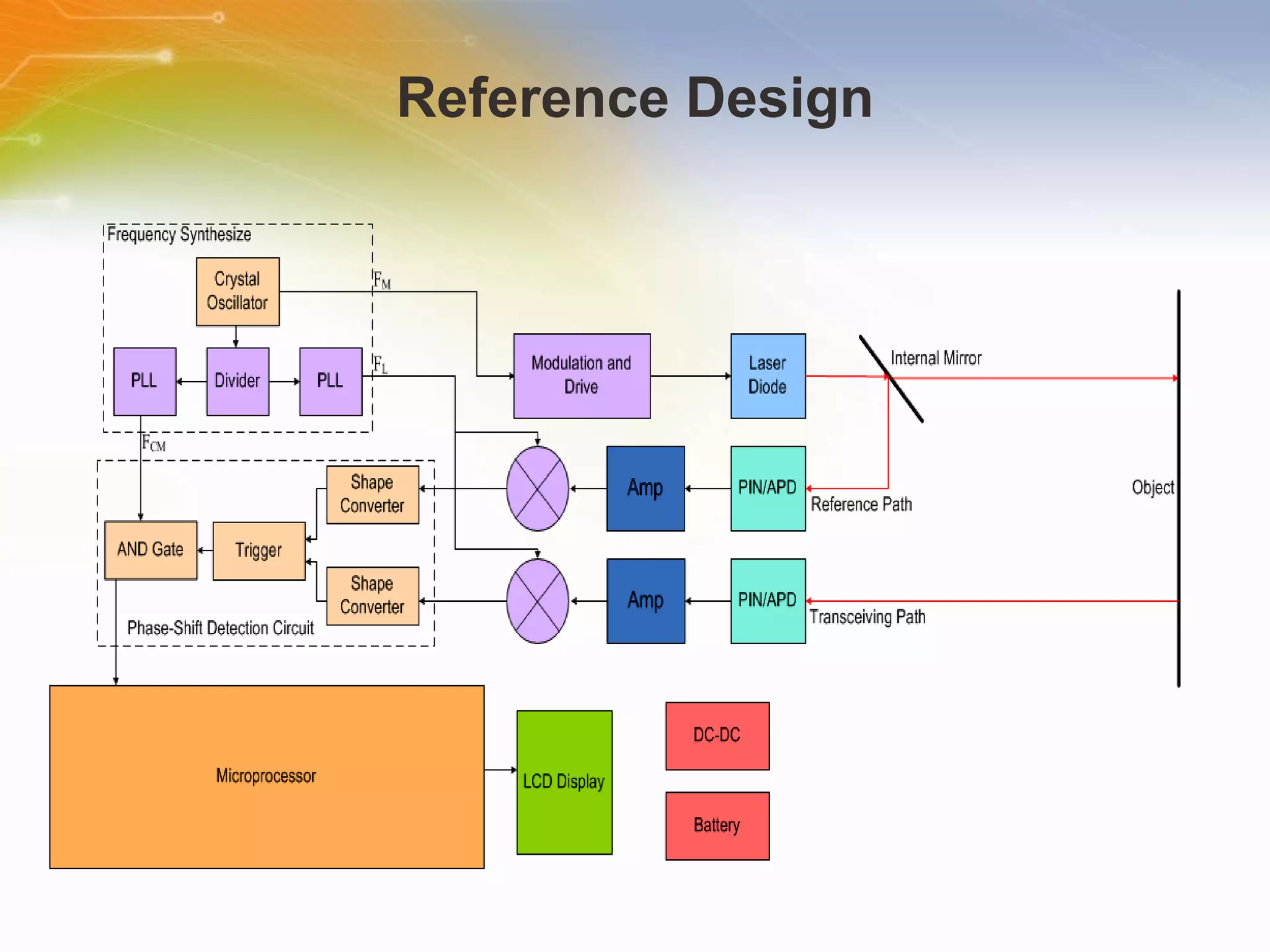
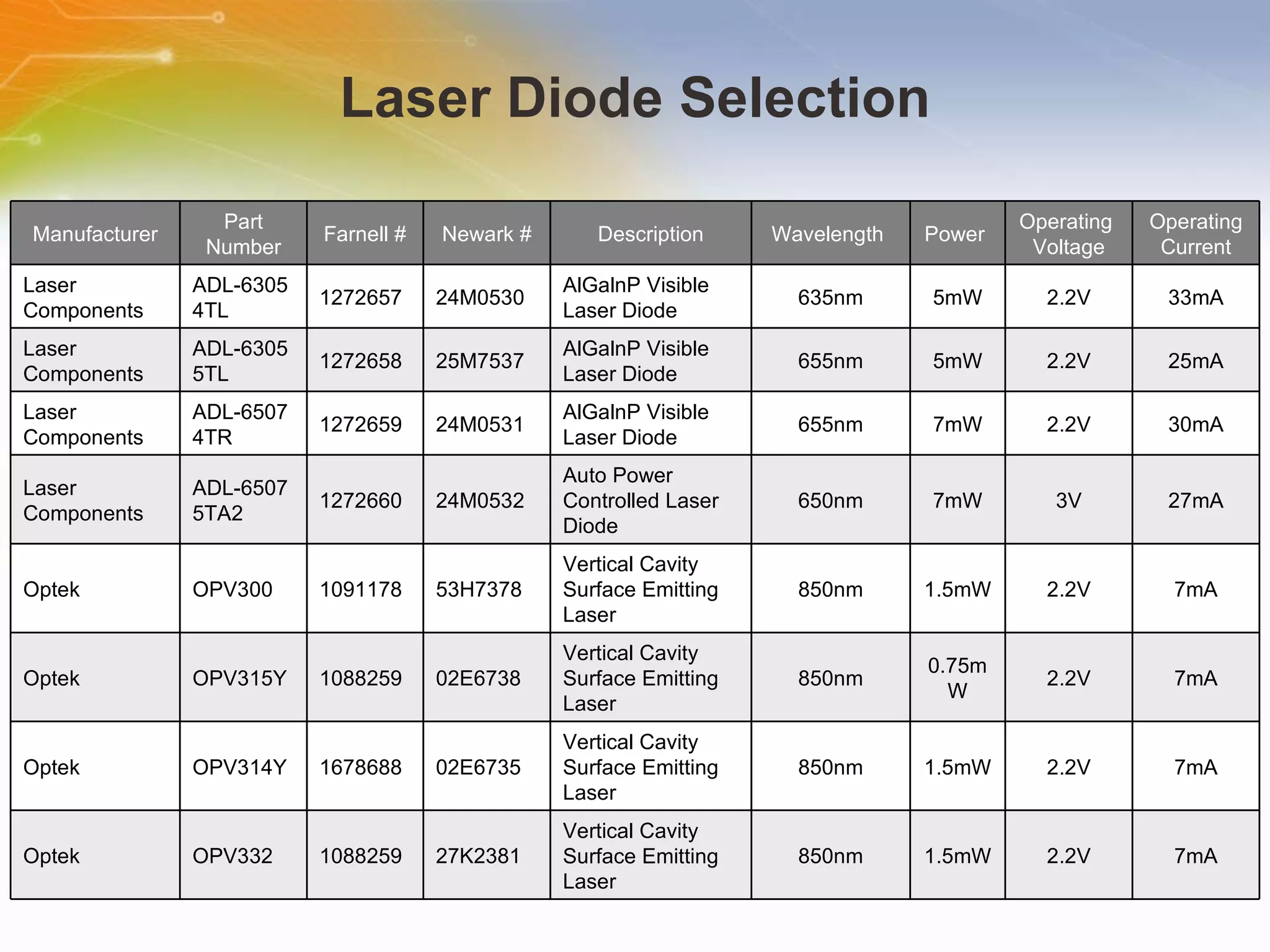
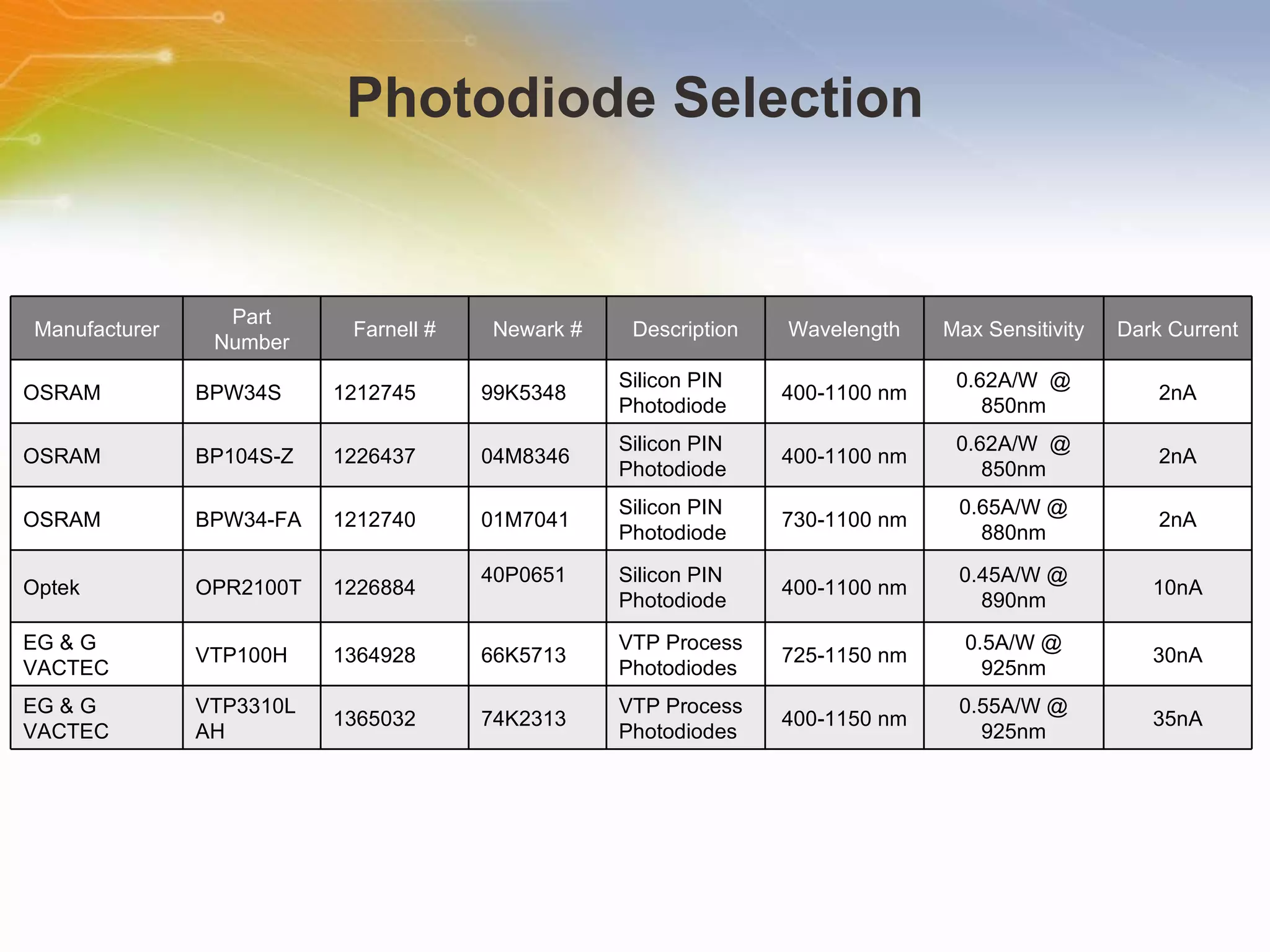
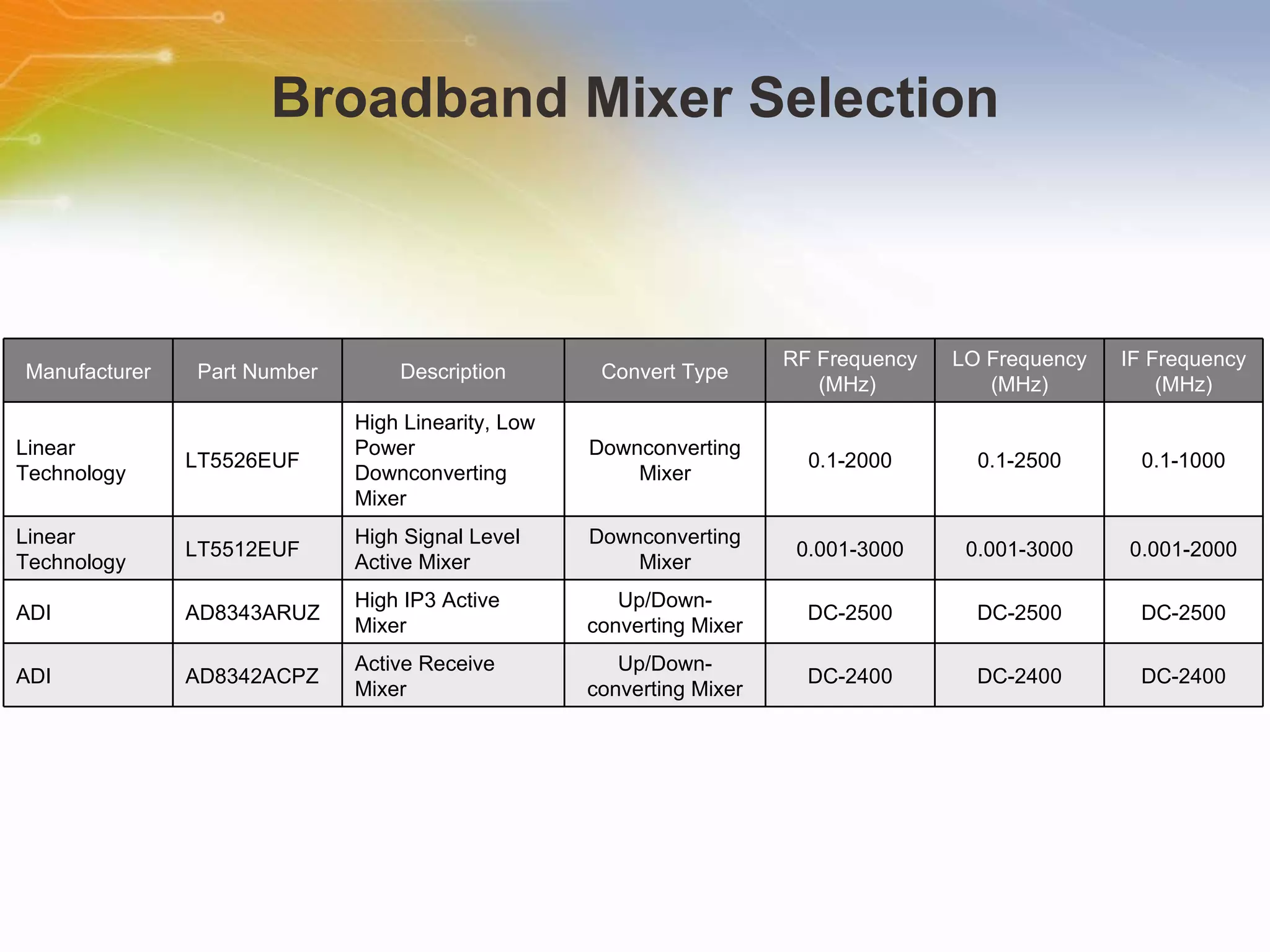
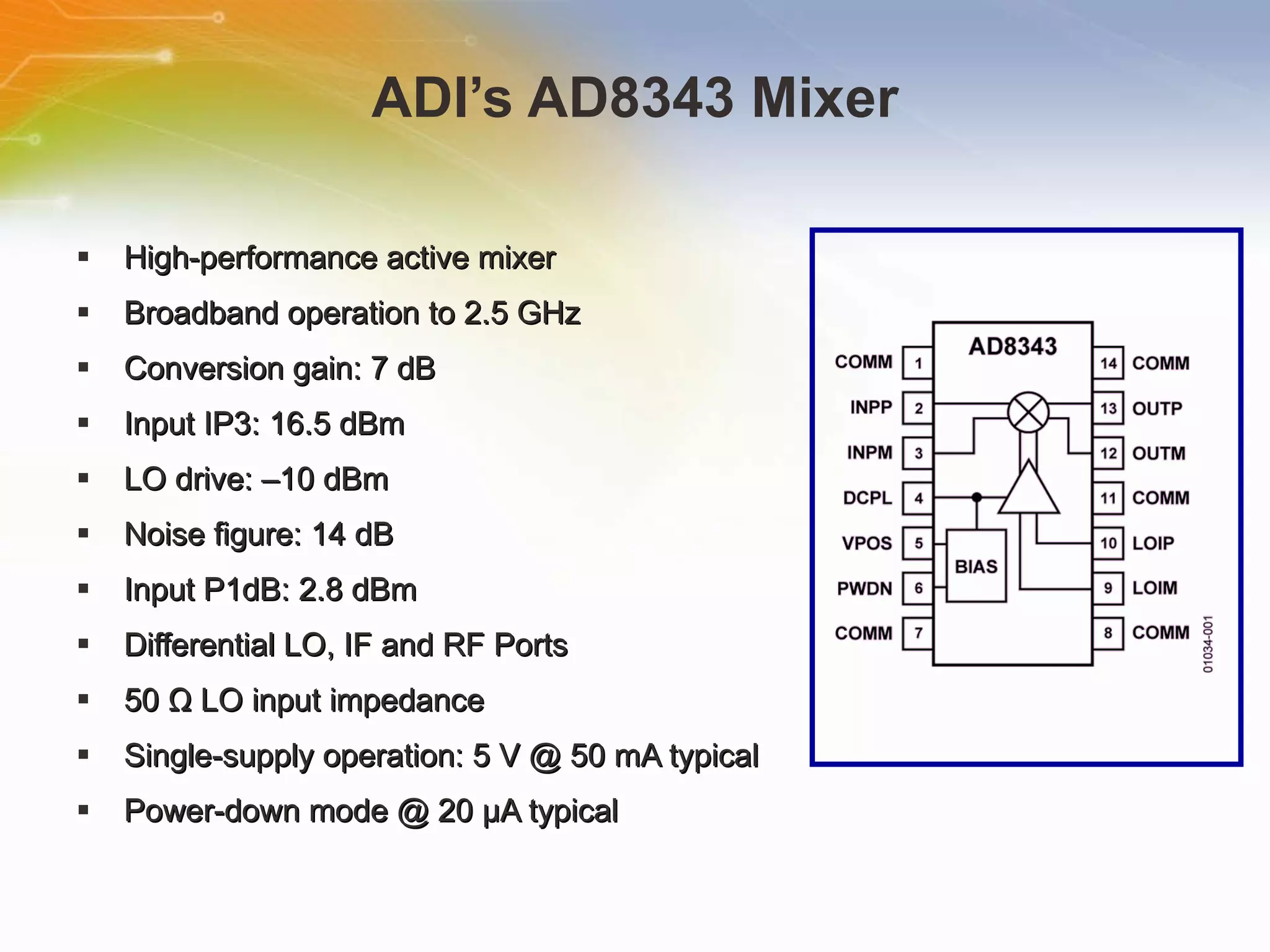
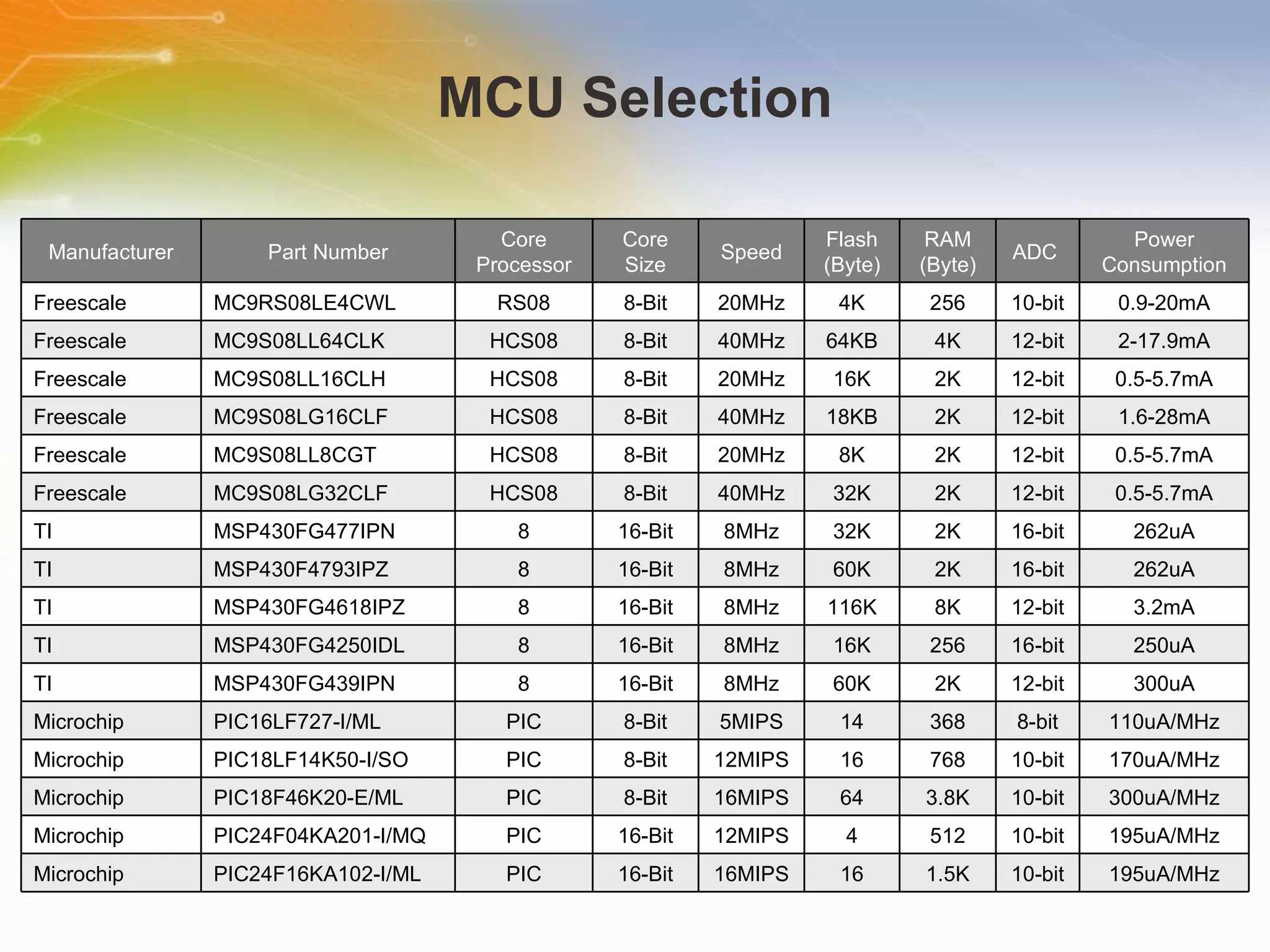
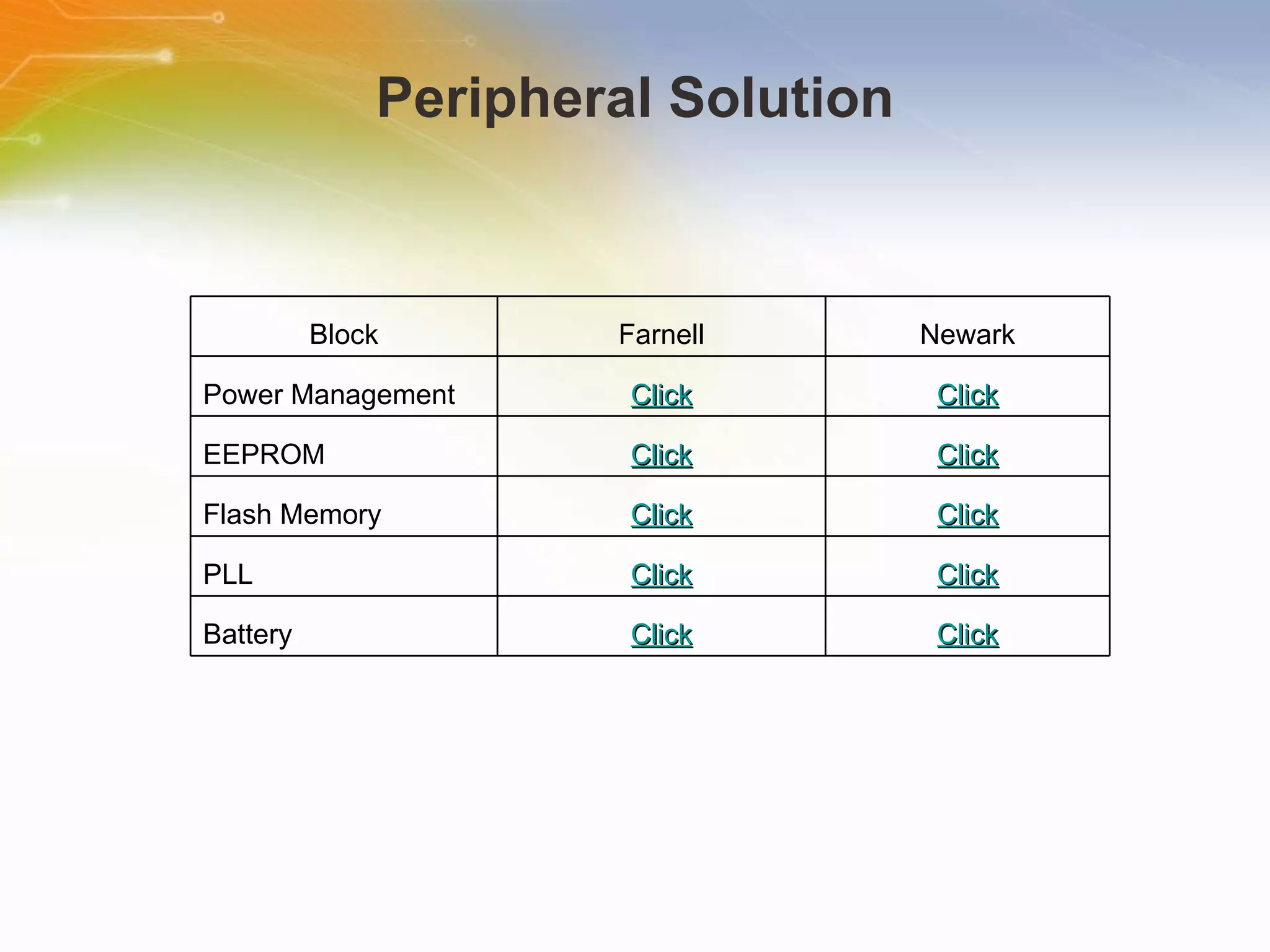

The document introduces handheld laser rangefinders, including what they are, their applications in fields like military, sports, and industry, and recommendations for key components in a laser rangefinder reference design including lasers, photodiodes, mixers, microcontrollers, and peripherals to consider.