Downloaded 453 times















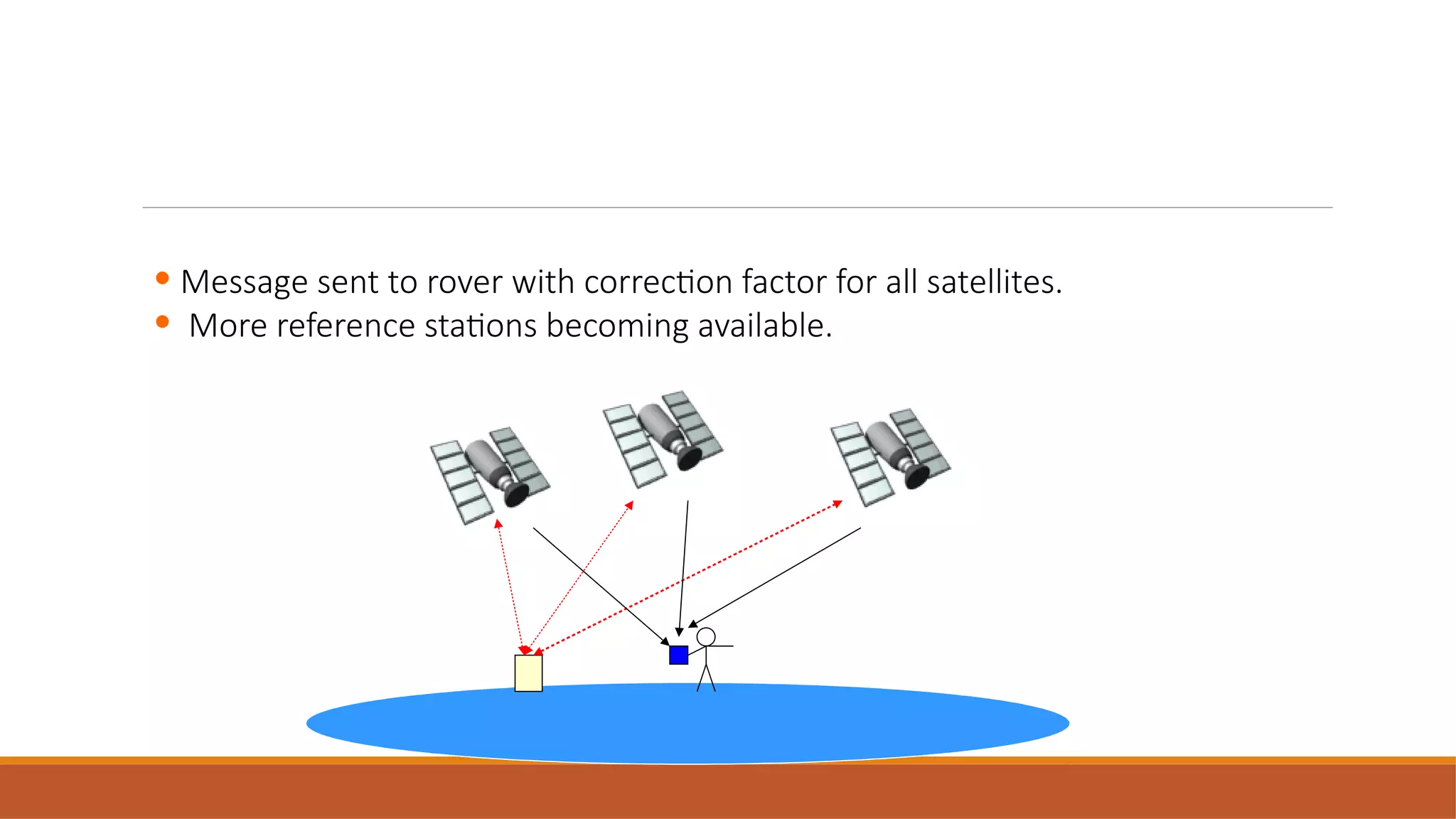



















This document discusses differential GPS (DGPS), which improves the accuracy of GPS positioning. It works by using a stationary GPS receiver at a known location to calculate error corrections, which are transmitted to a roving receiver to improve its position accuracy. DGPS can reduce GPS errors from sources like atmospheric delays, satellite orbit issues, and multipath effects, providing sub-meter accuracy compared to the 5-10 meter accuracy of standard GPS. It allows real-time position correction or post-processed correction through data from a fixed base station.






















































![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





























