Downloaded 286 times
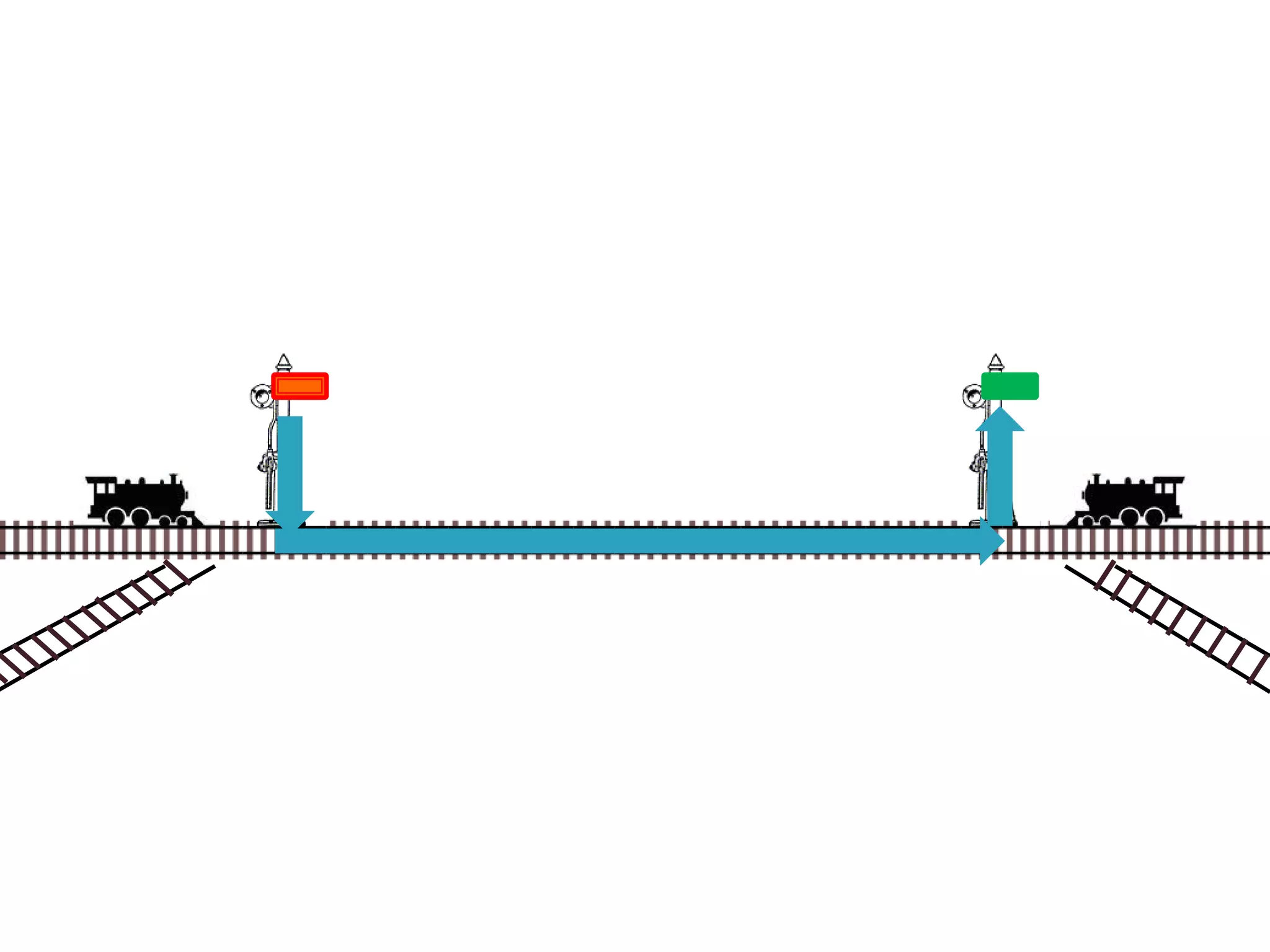
![Begin transaction TA:
read balance1 [ 100 ]
balance1 = balance1 - 100
if balance < 0
print “insufficient funds”
abort T1
end
write balance1 [ 0 ]
read balance2 [ 100 ]](https://image.slidesharecdn.com/operatingsystems1-week5-scheduling-170202011719/75/Operating-Systems-Process-Scheduling-58-2048.jpg)
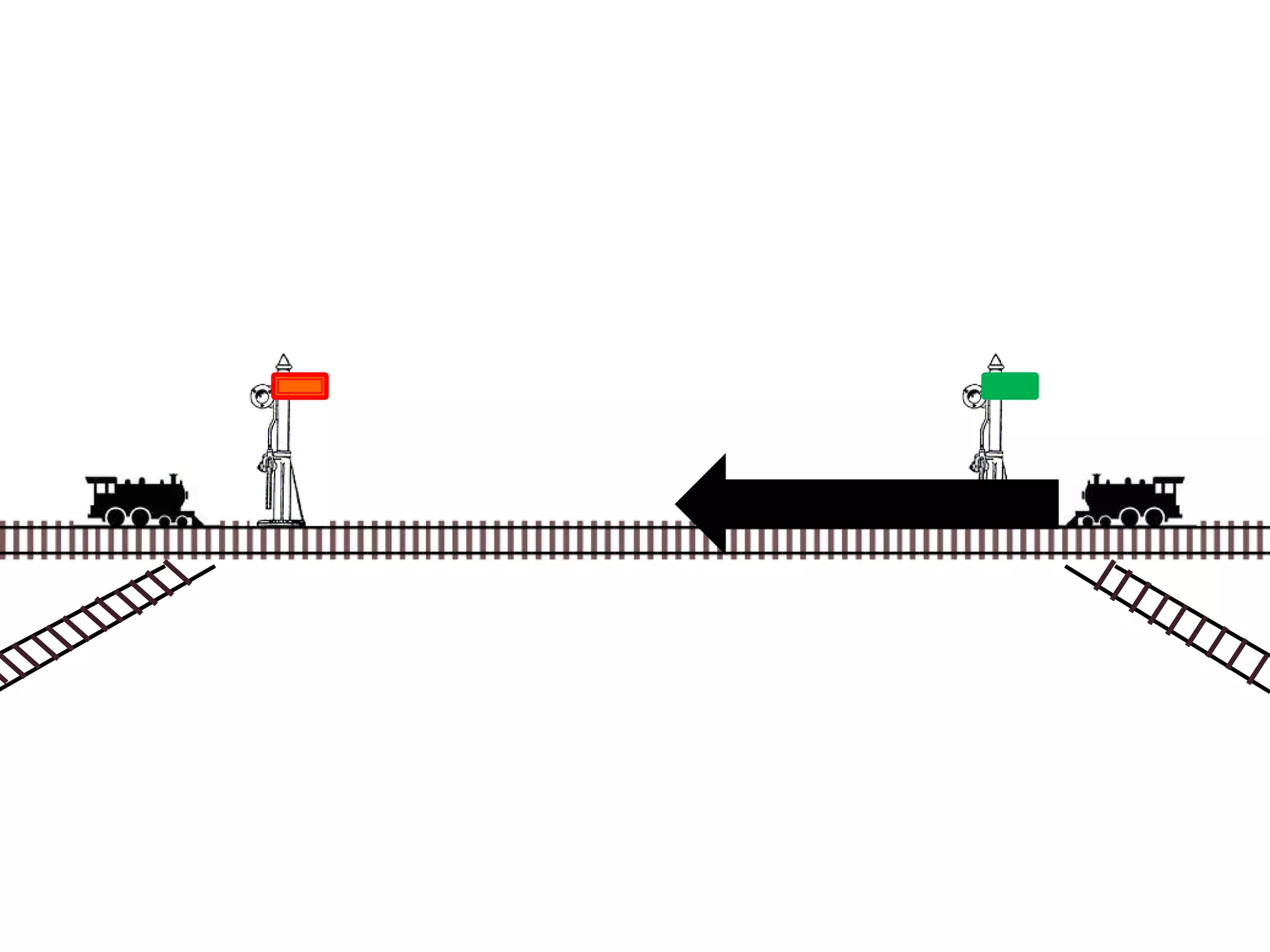
![Begin transaction TA:
read balance1 [ 100 ]
balance1 = balance1 - 100
if balance < 0
print “insufficient funds”
abort T1
end
write balance1 [ 0 ]
read balance2 [ 100 ]
Begin transaction TB:
read balance2 [ 100 ]
balance2 = balance2 - 100
if balance < 0
print “insufficient funds”
abort T2
end
write balance2 [ 0 ]
read balance1 [ 100 ]](https://image.slidesharecdn.com/operatingsystems1-week5-scheduling-170202011719/75/Operating-Systems-Process-Scheduling-59-2048.jpg)
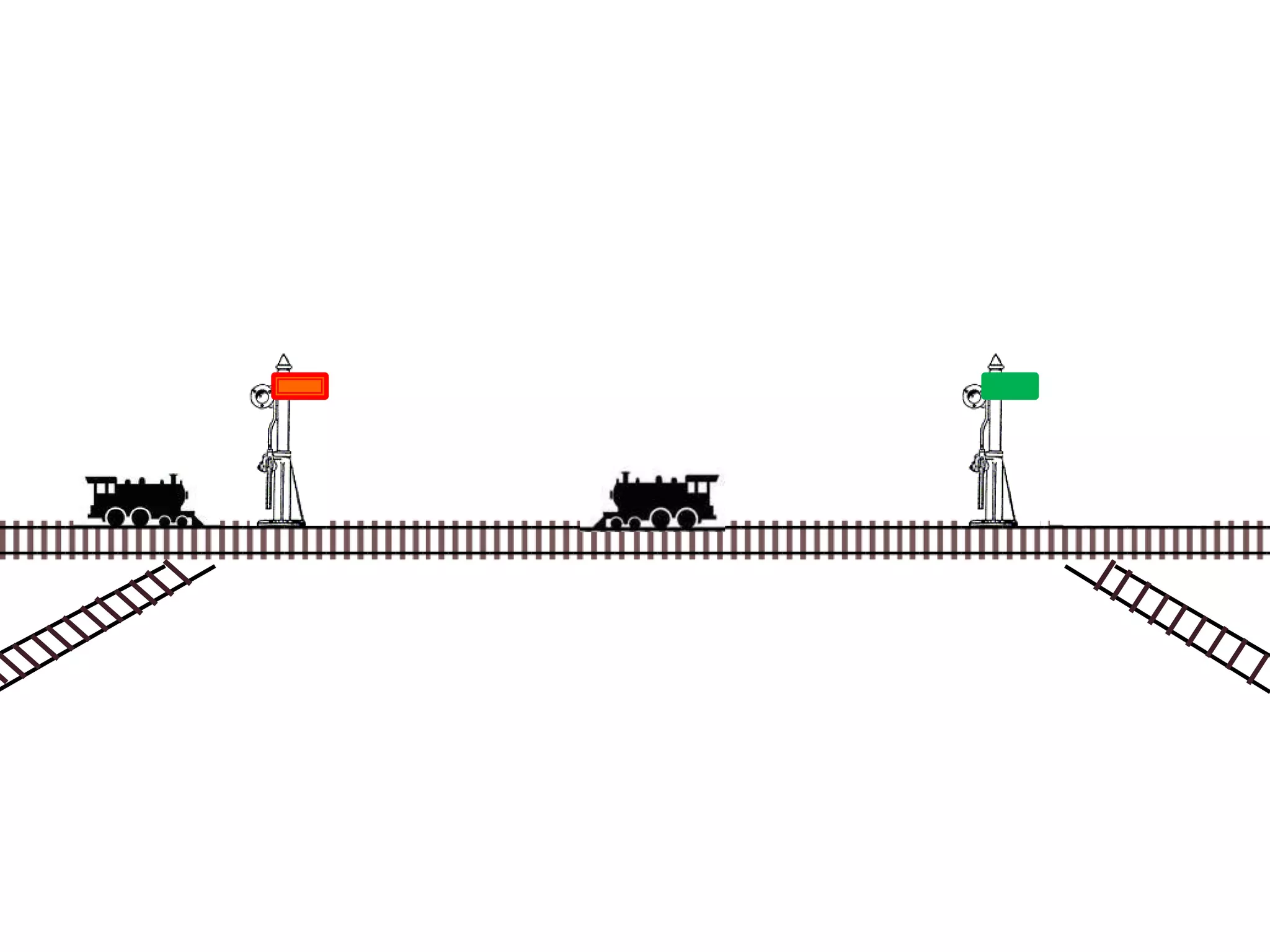
![Begin transaction TB:
read balance2 [ 100 ]
balance2 = balance2 - 100
if balance < 0
print “insufficient funds”
abort T2
end
write balance2 [ 0 ]
read balance1 [ 100 ]
Begin transaction TA:
read balance1 [ 100 ]
balance1 = balance1 - 100
if balance < 0
print “insufficient funds”
abort T1
end
write balance1 [ 0 ]
read balance2 [ 100 ]](https://image.slidesharecdn.com/operatingsystems1-week5-scheduling-170202011719/75/Operating-Systems-Process-Scheduling-60-2048.jpg)
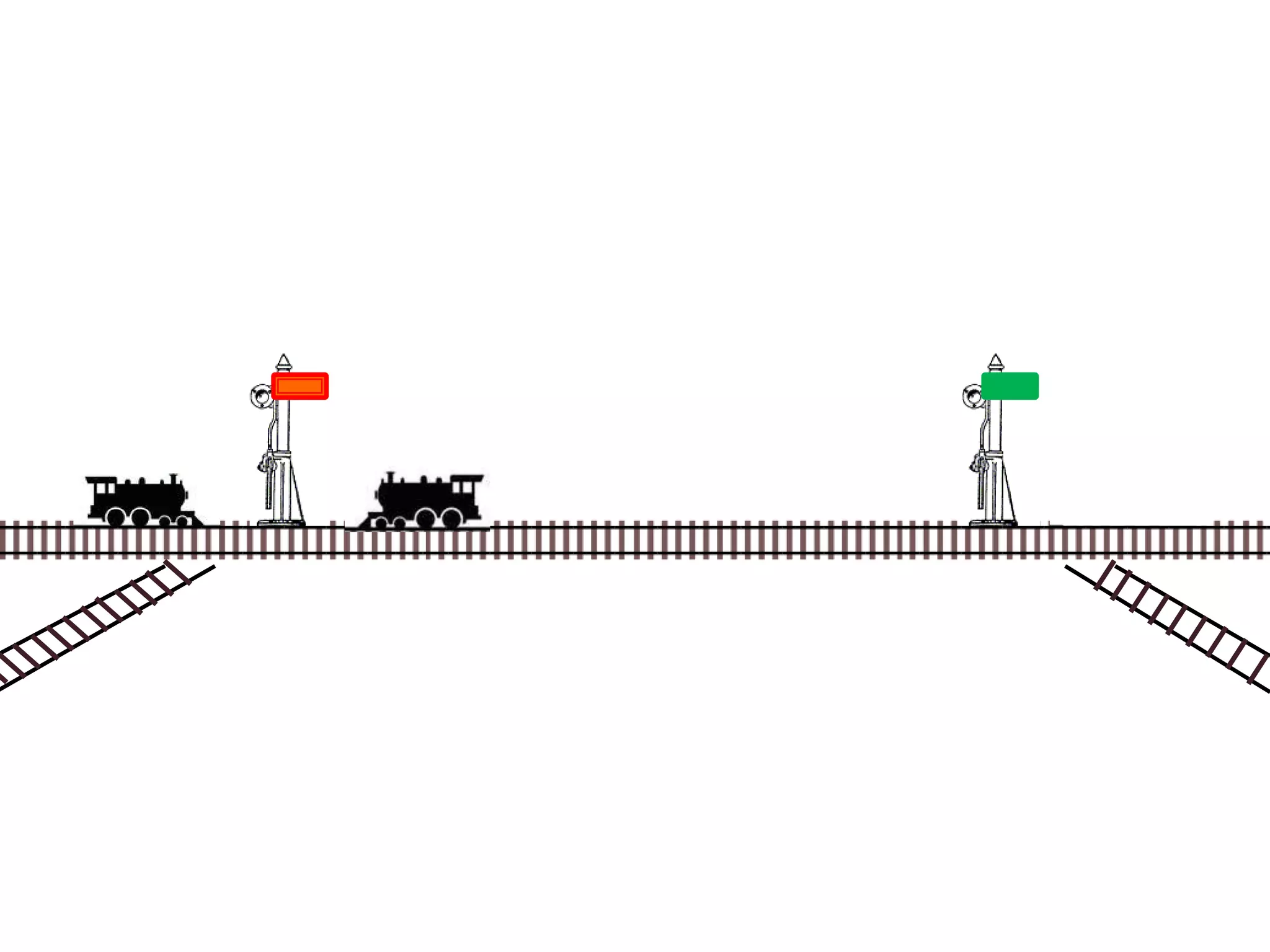
![Begin transaction TB:
read balance2 [ 100 ]
balance2 = balance2 - 100
if balance < 0
print “insufficient funds”
abort T2
end
write balance2 [ 0 ]
read balance1 [ 100 ]
Begin transaction TA:
read balance1 [ 100 ]
balance1 = balance1 - 100
if balance < 0
print “insufficient funds”
abort T1
end
write balance1 [ 0 ]
read balance2 [ 100 ]](https://image.slidesharecdn.com/operatingsystems1-week5-scheduling-170202011719/75/Operating-Systems-Process-Scheduling-61-2048.jpg)

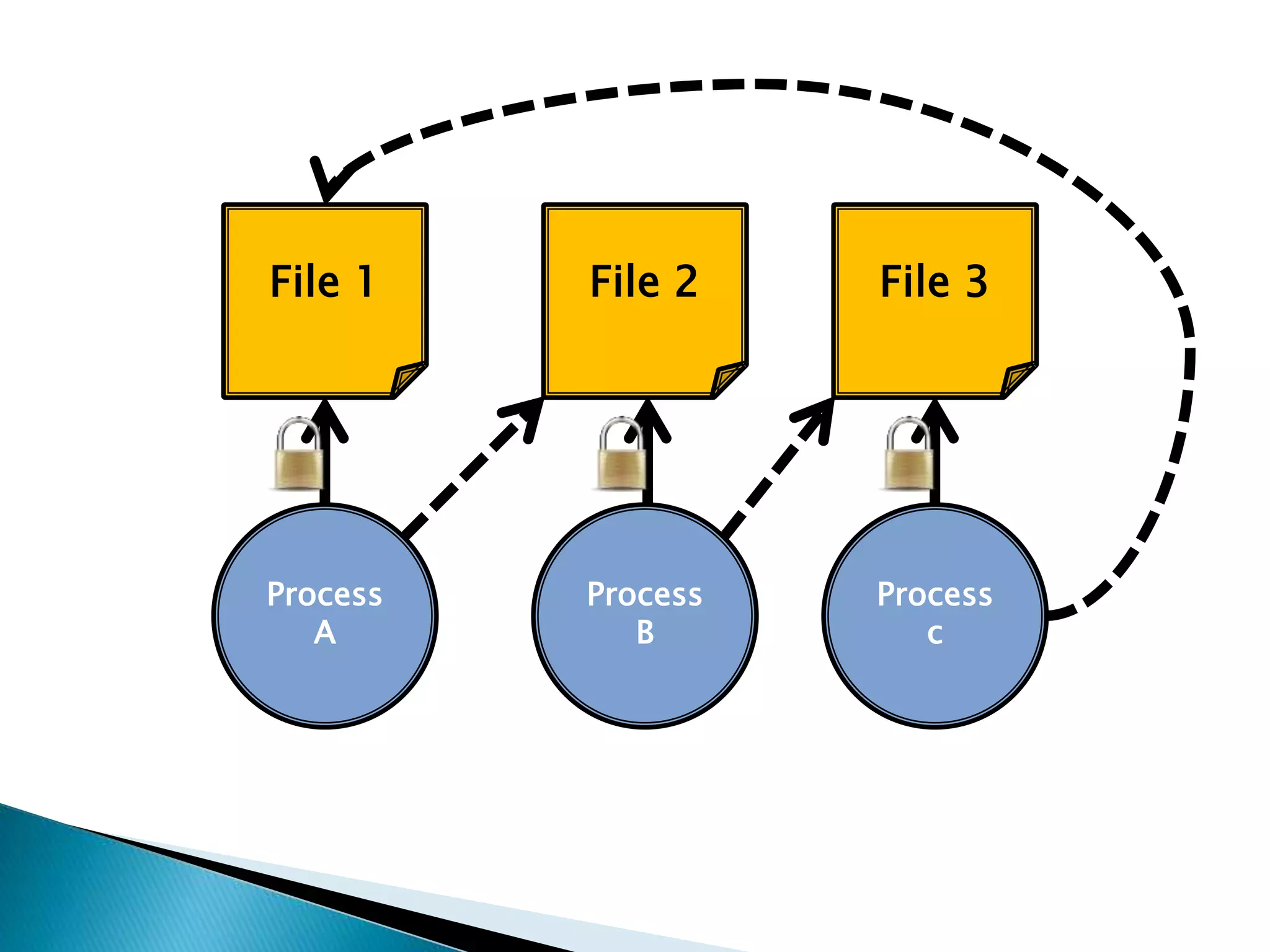
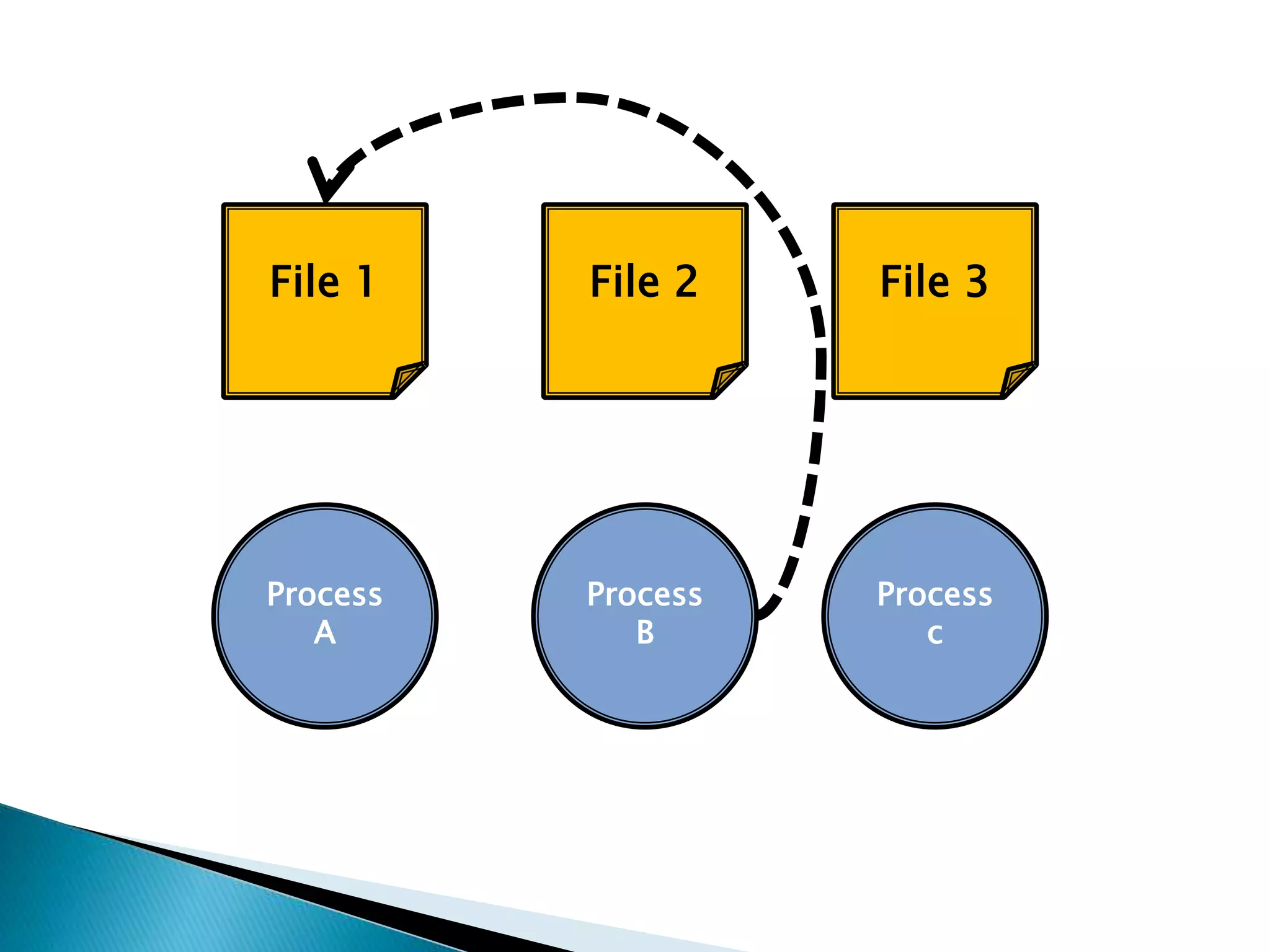


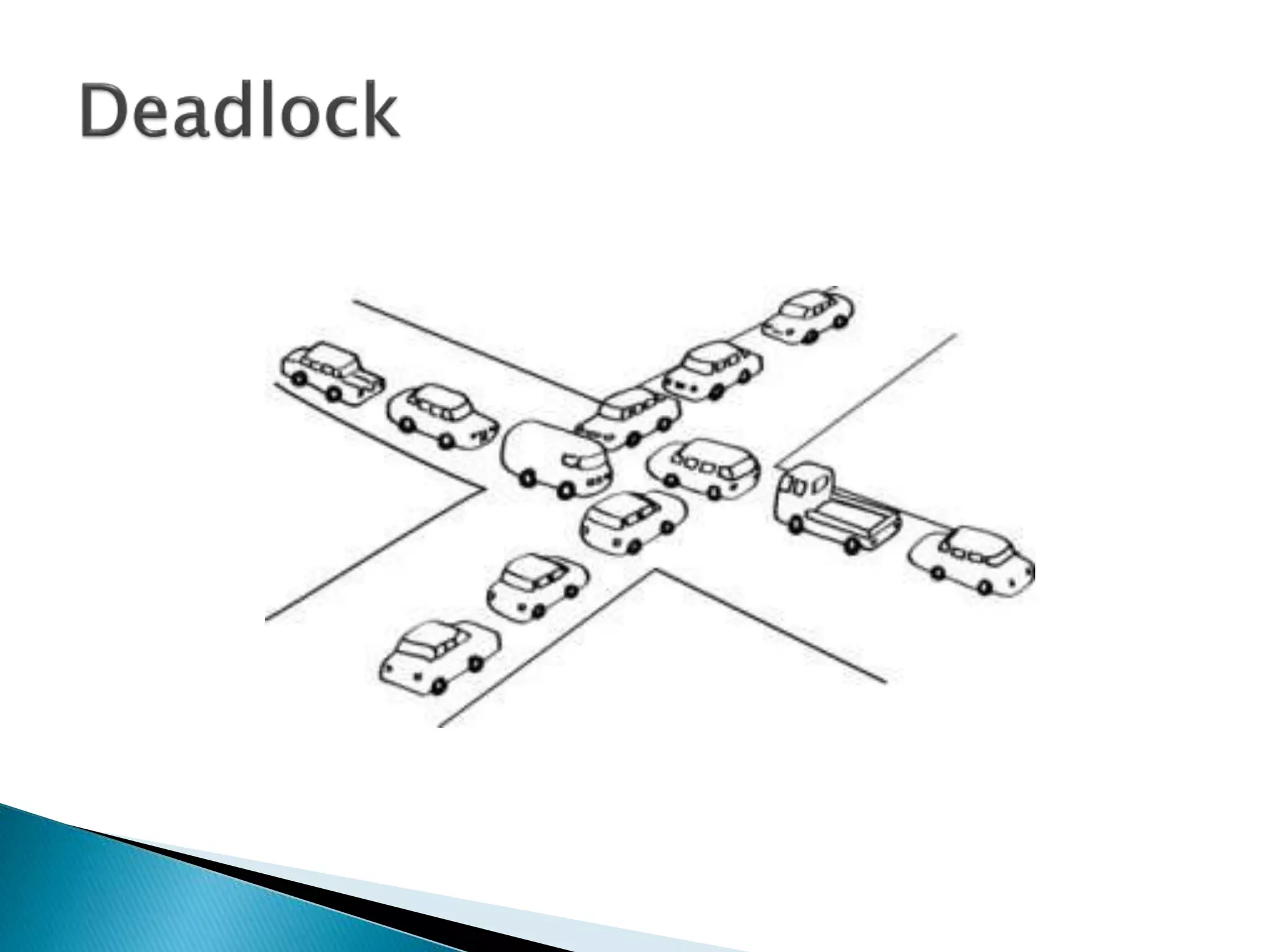
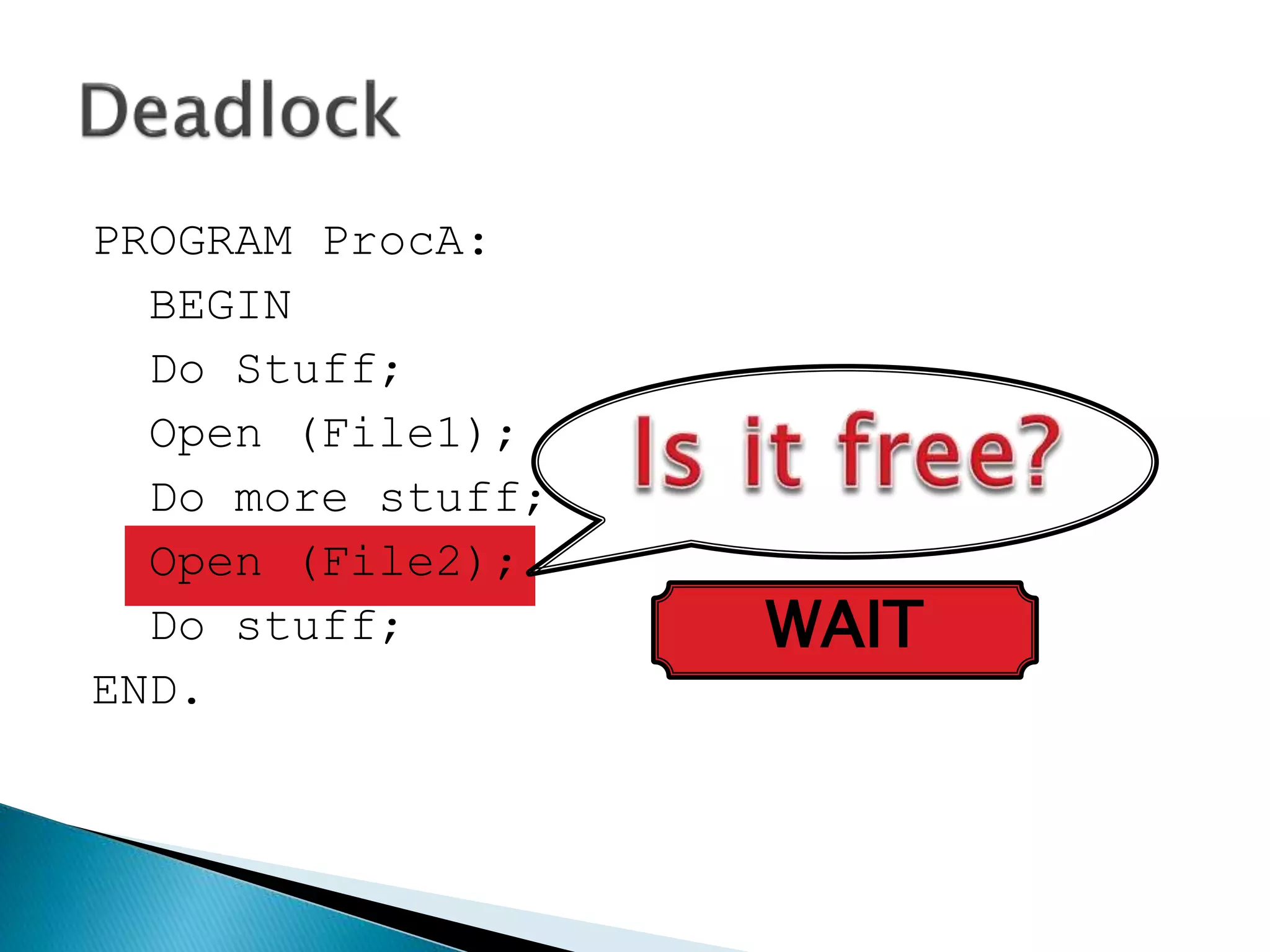
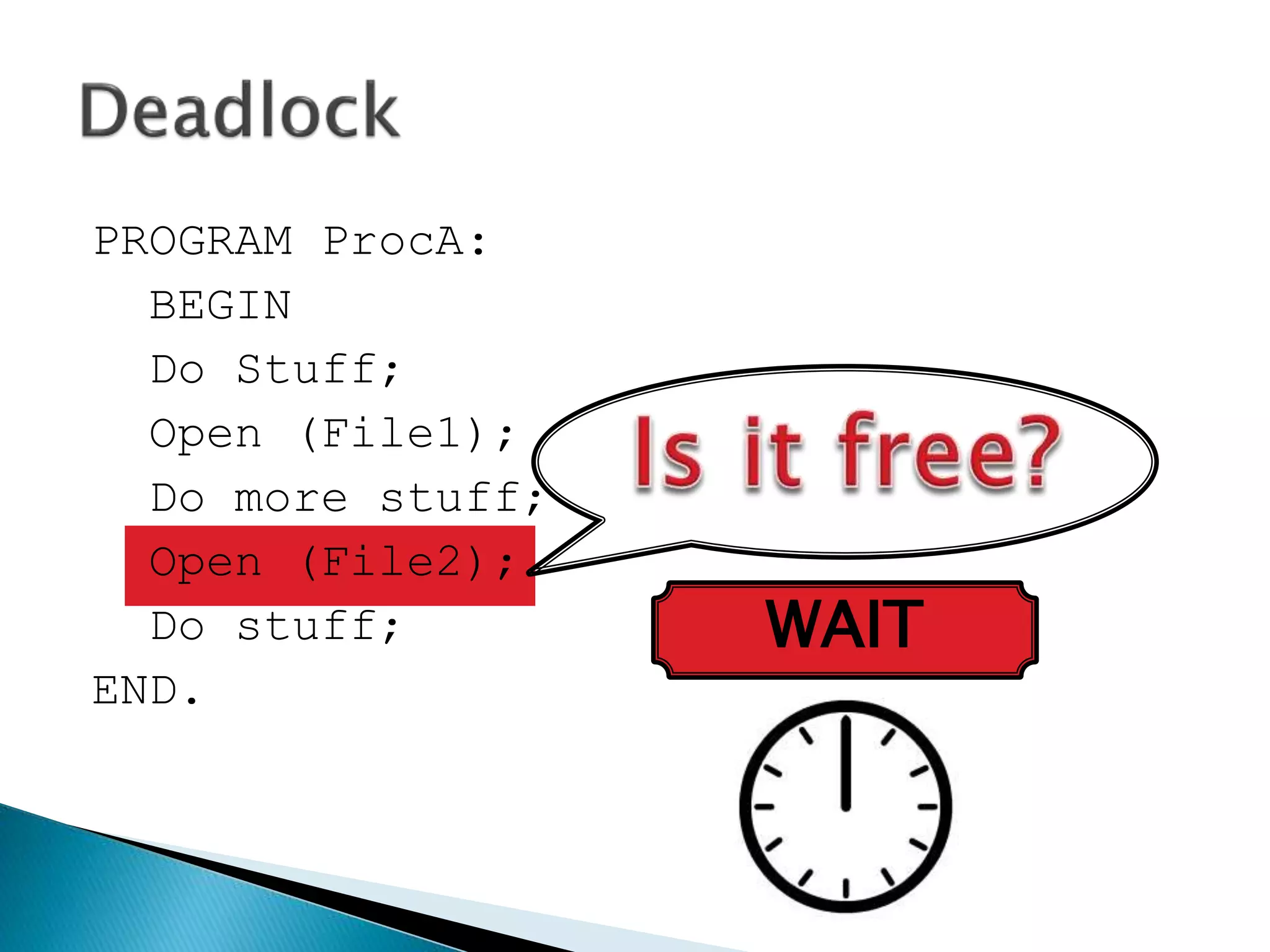
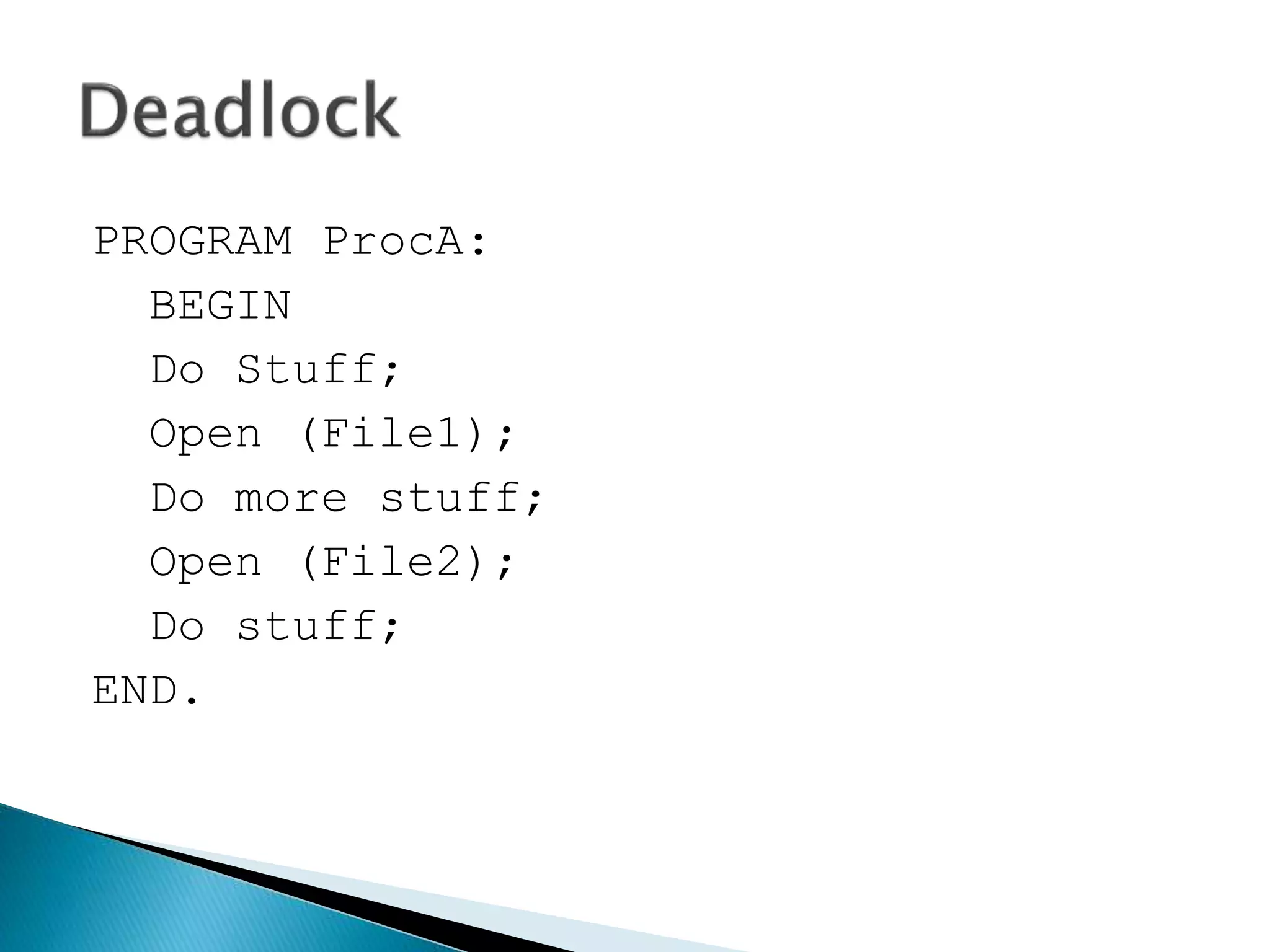
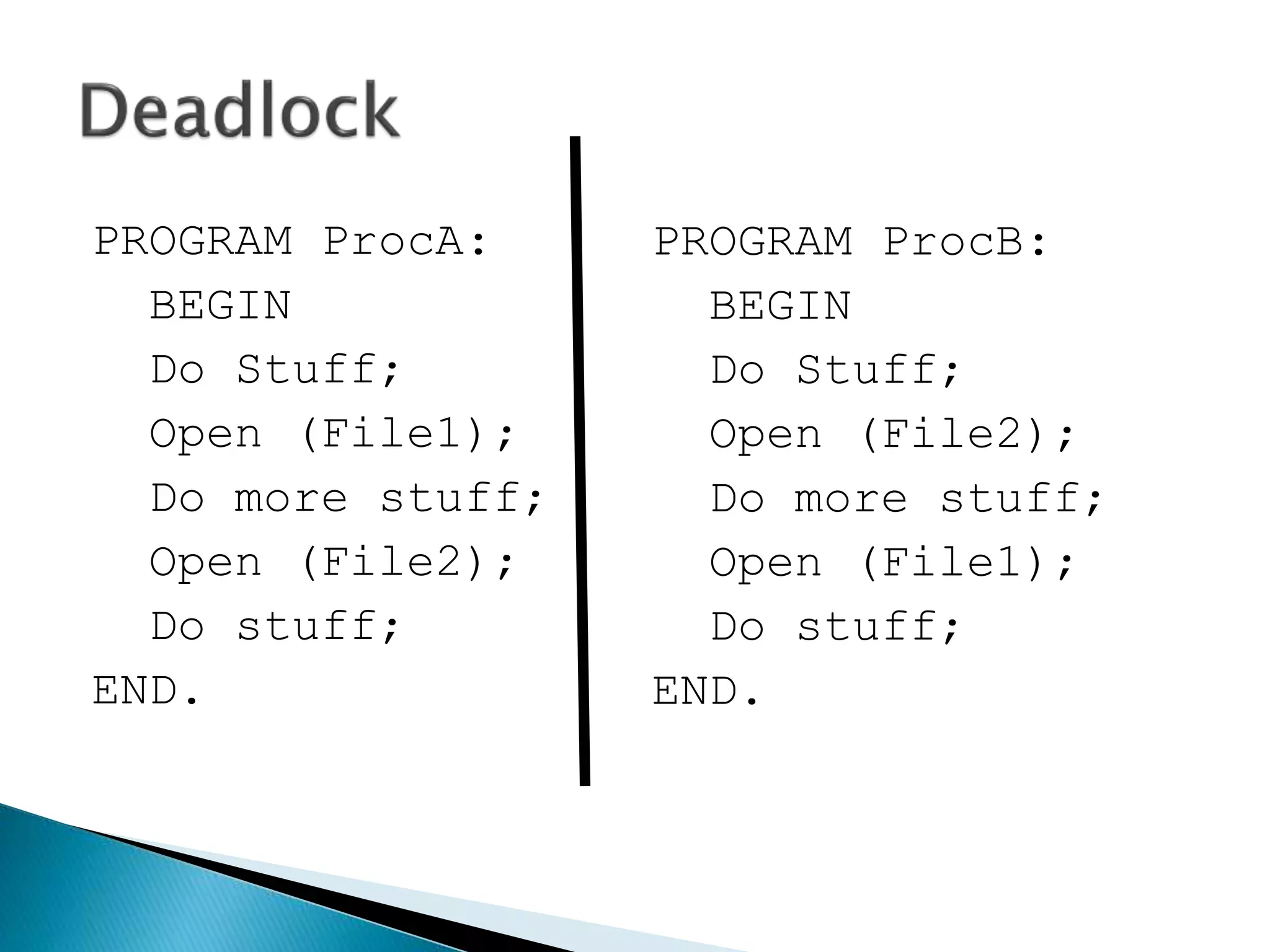
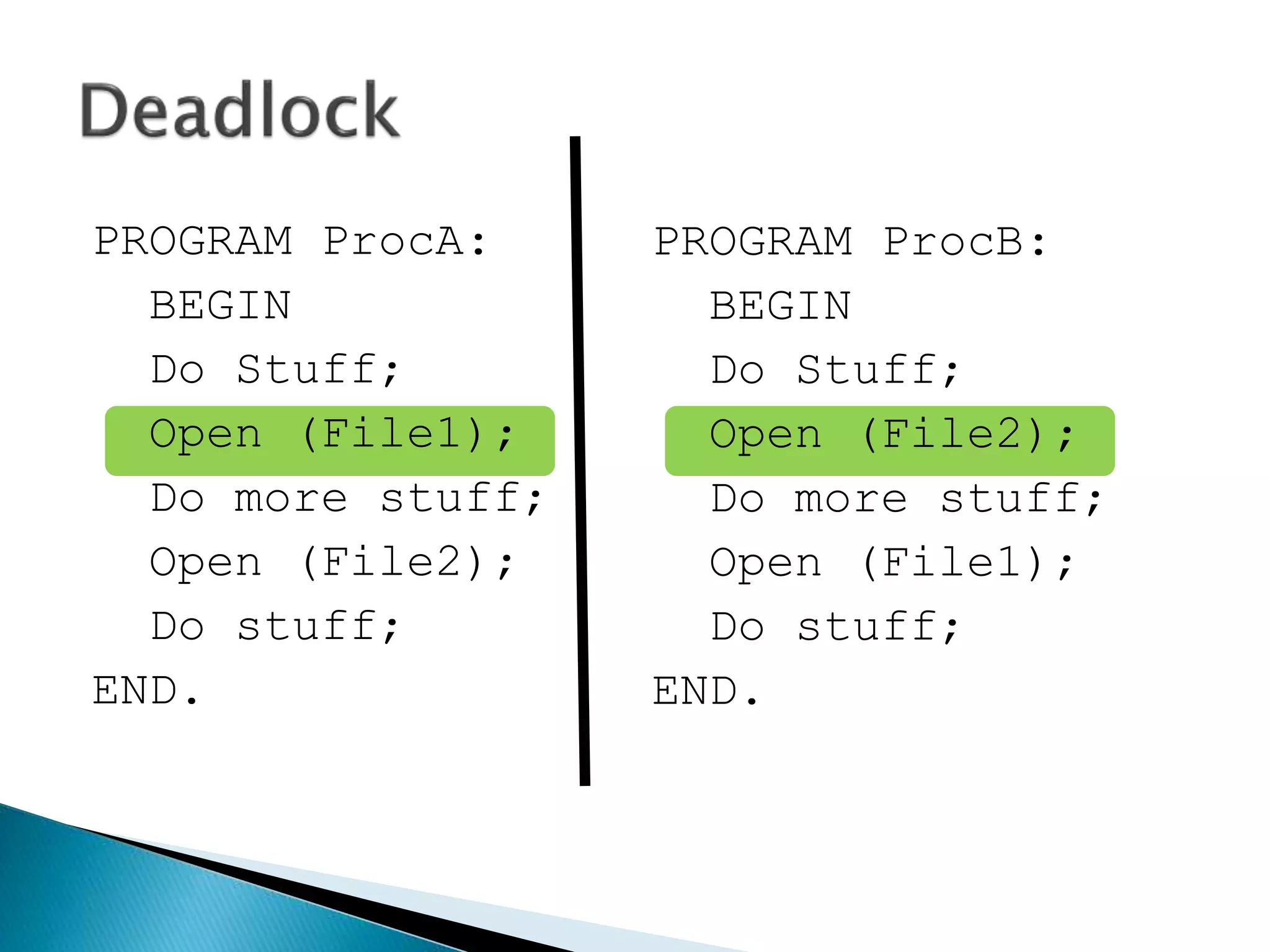
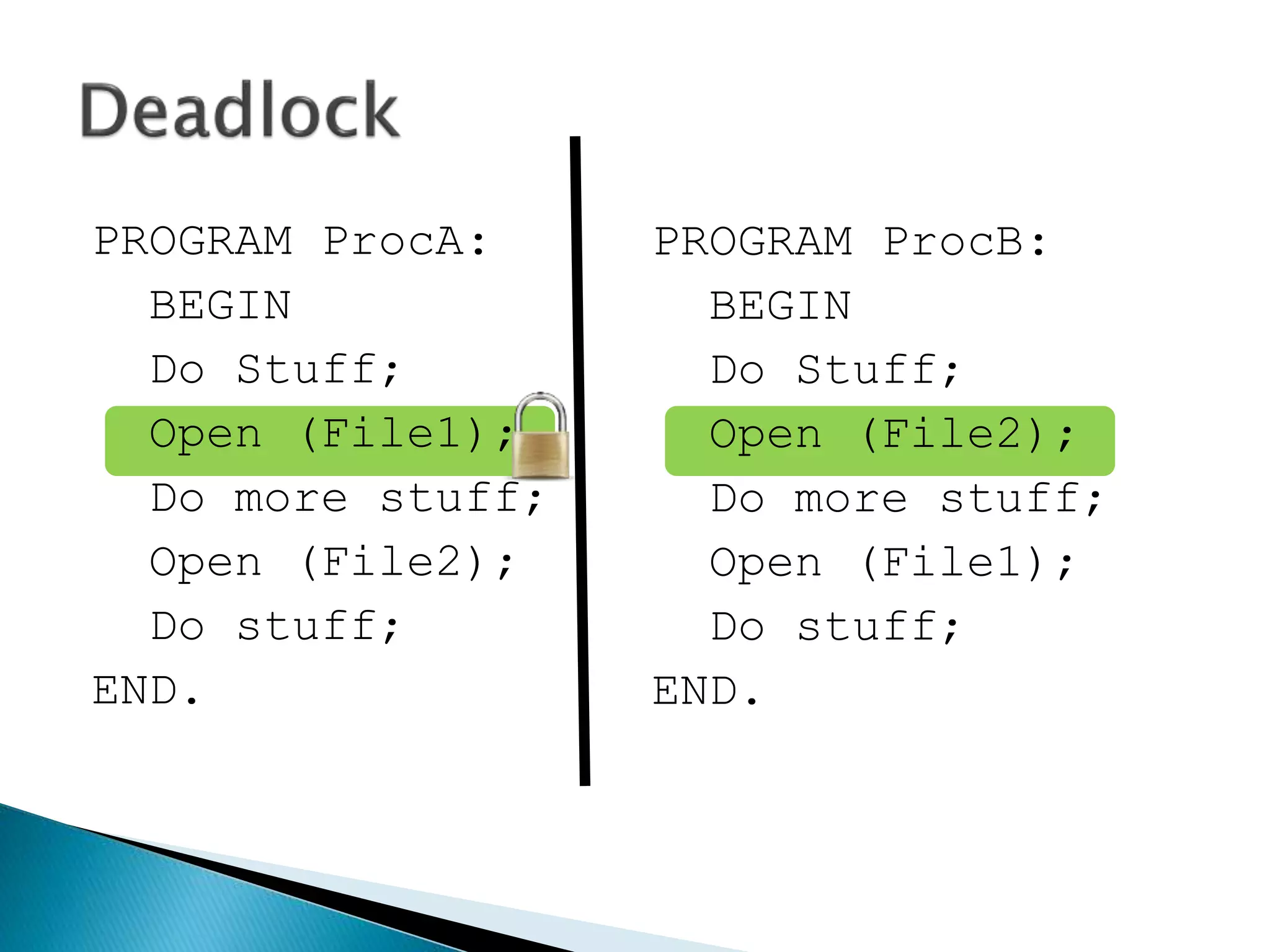
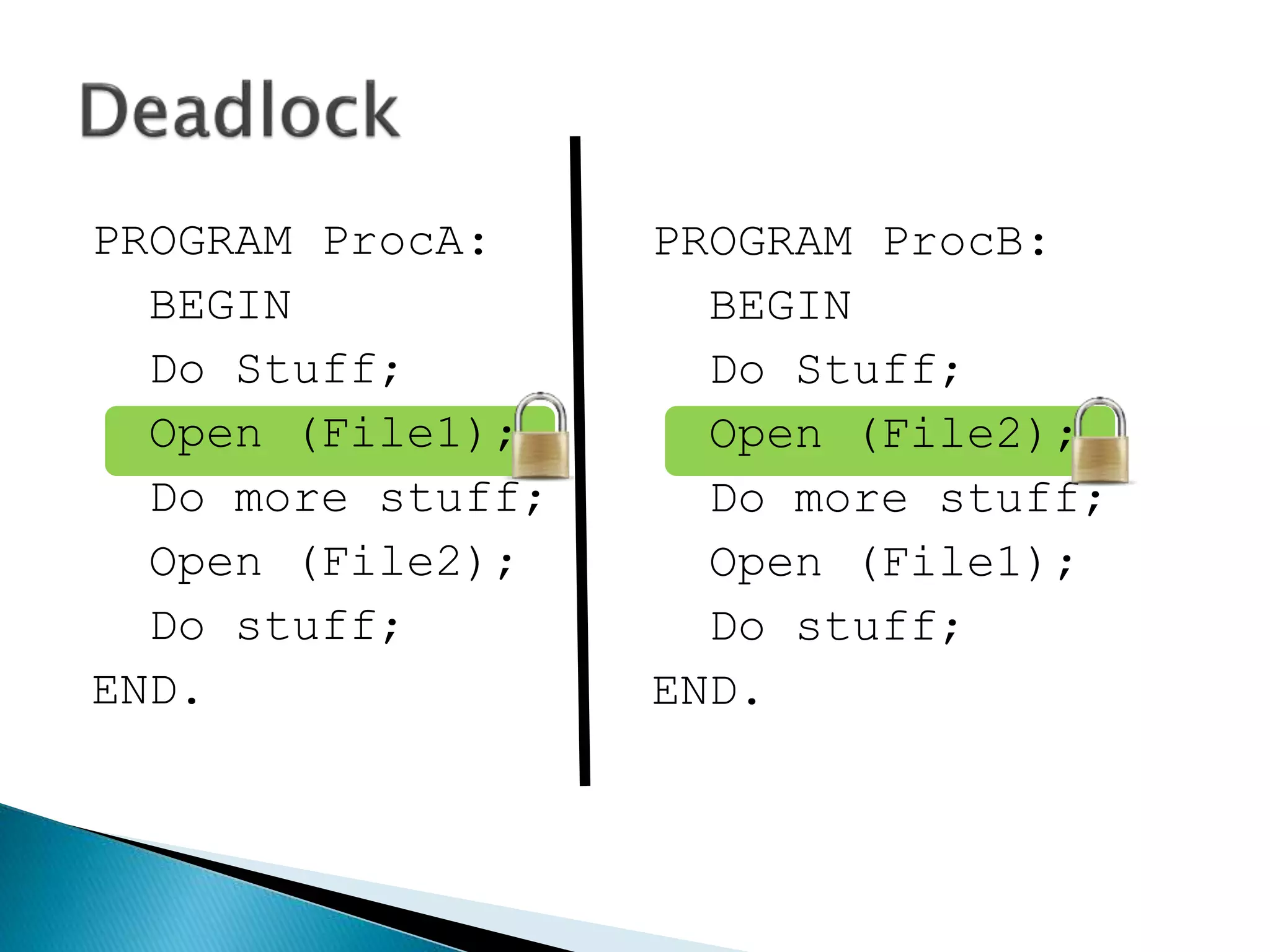
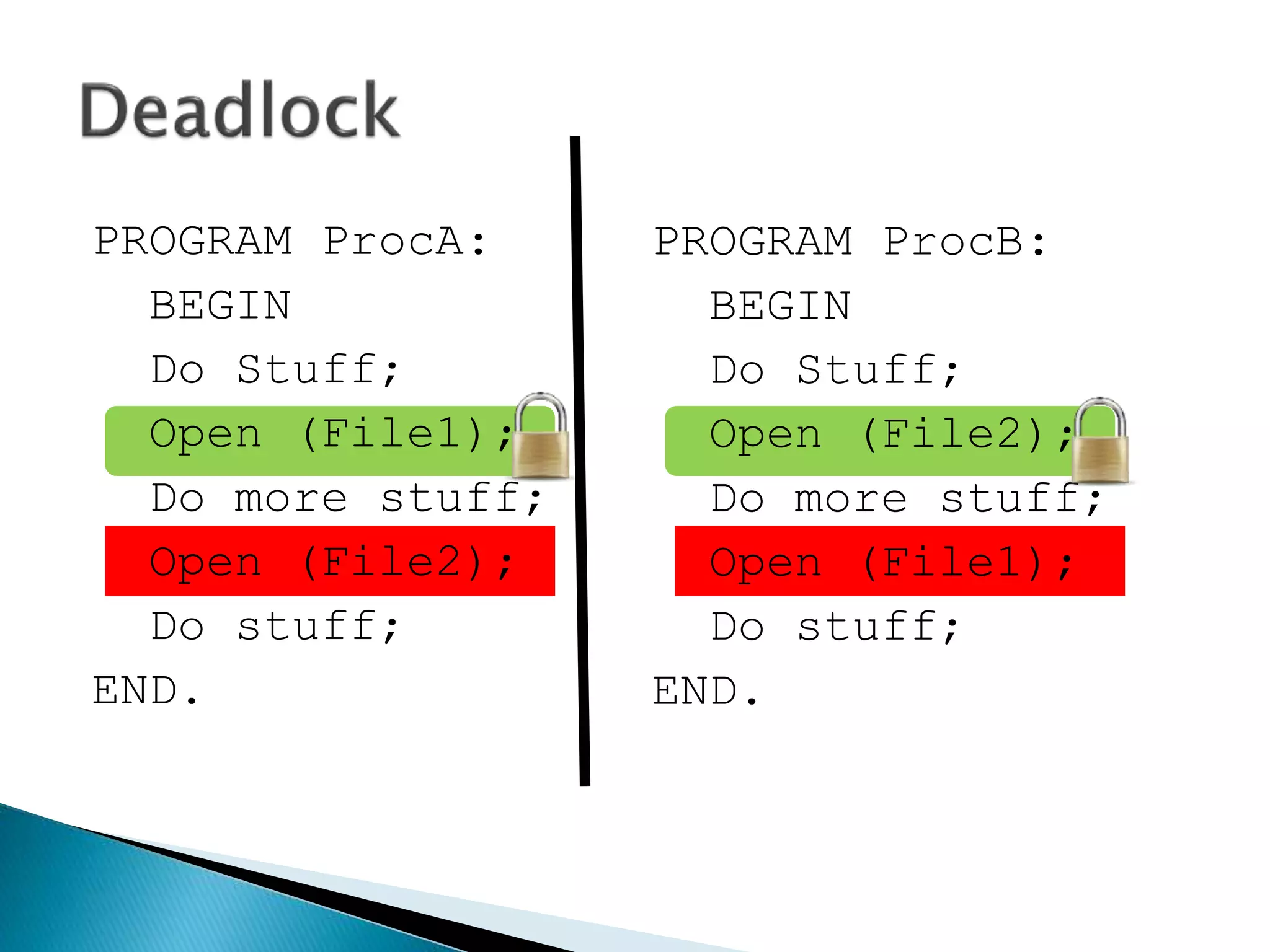
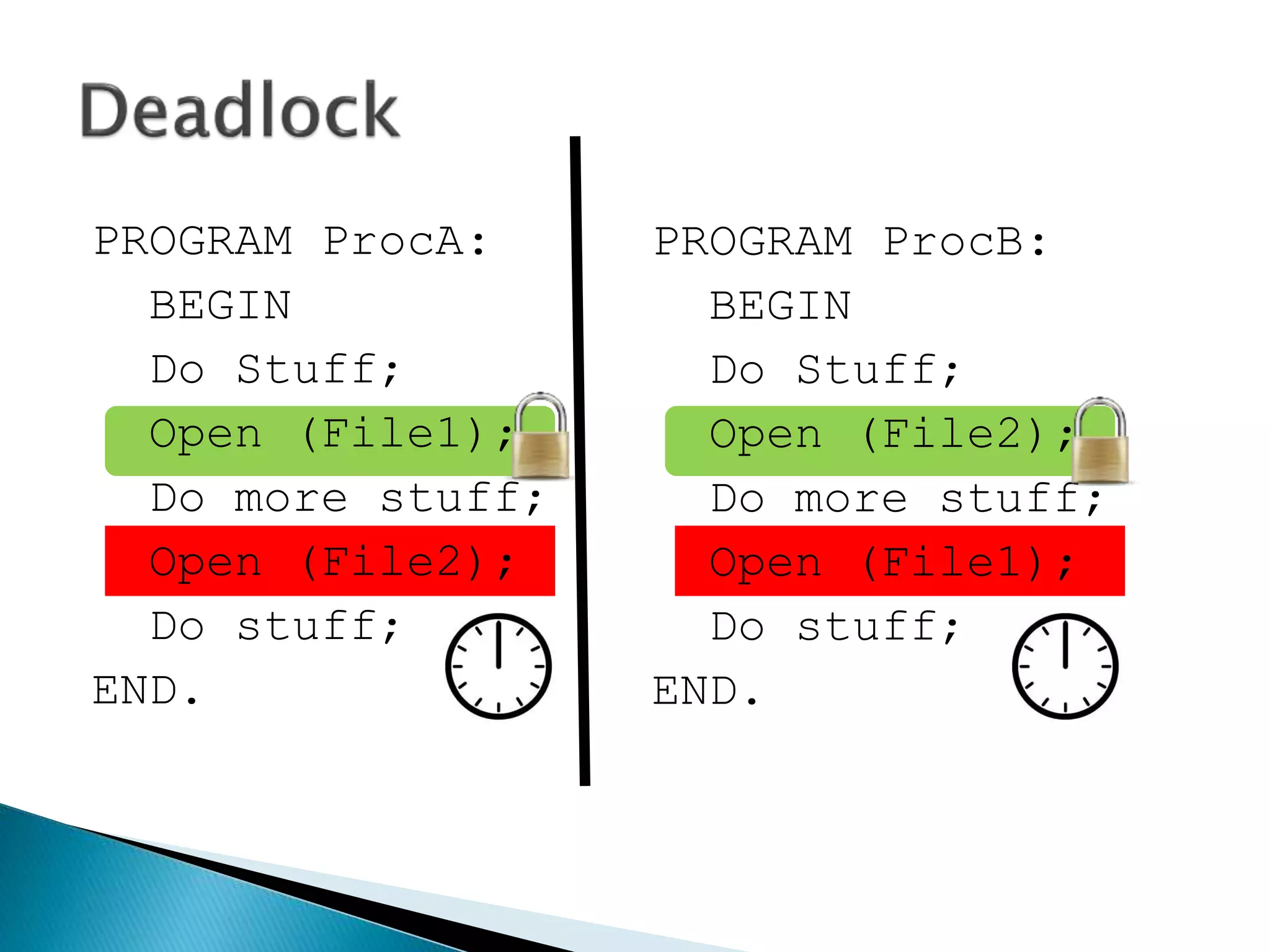
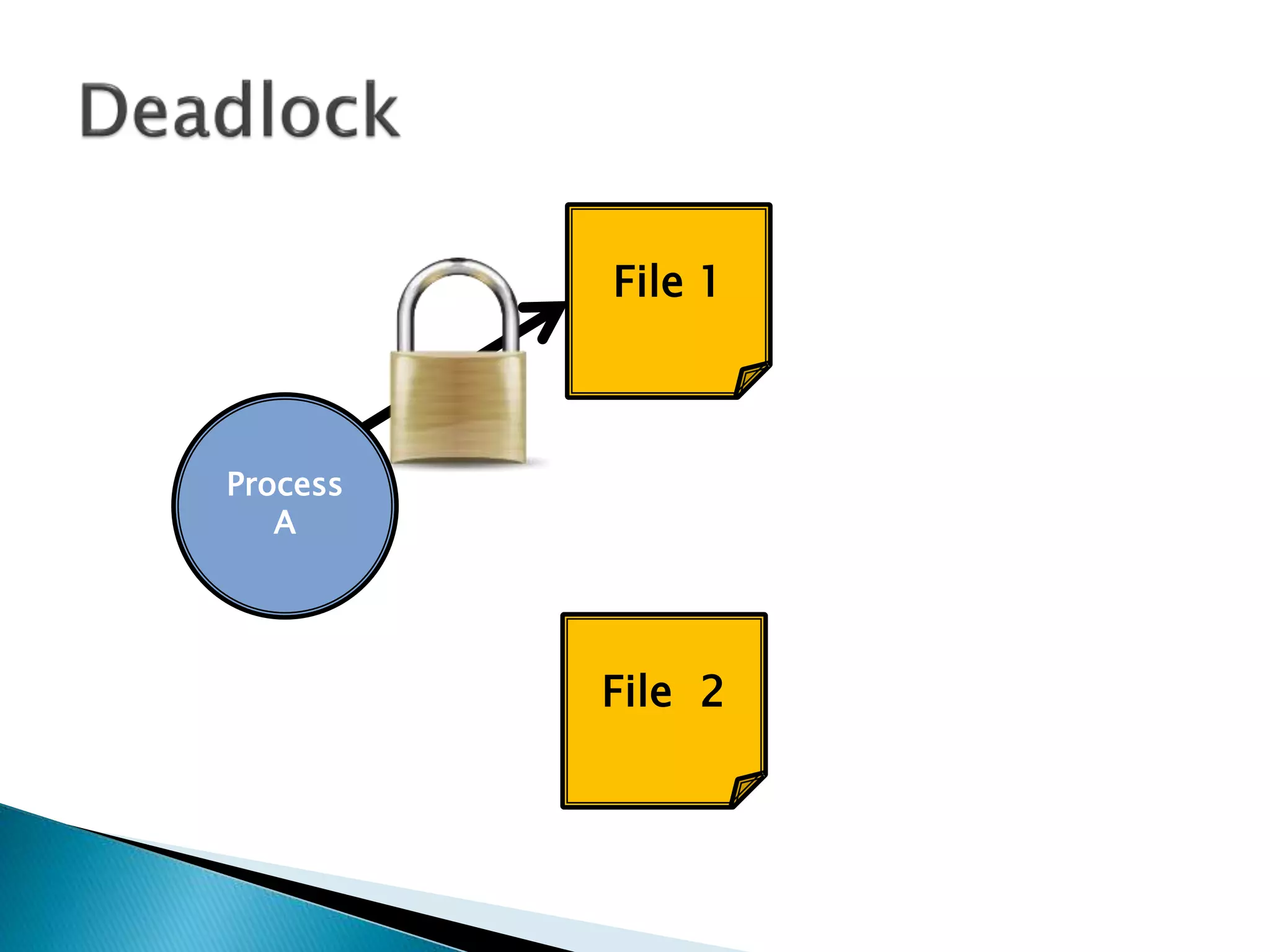
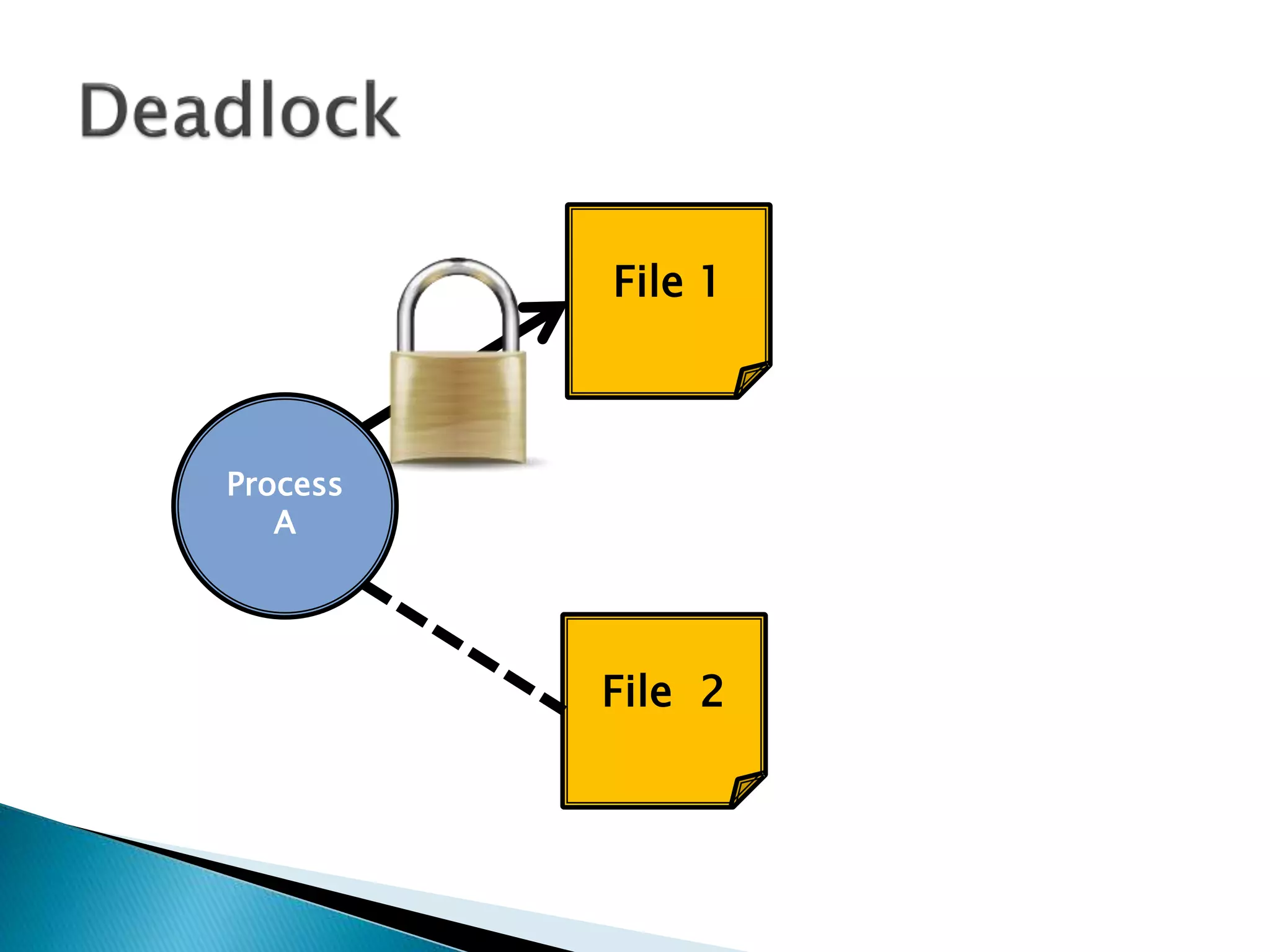
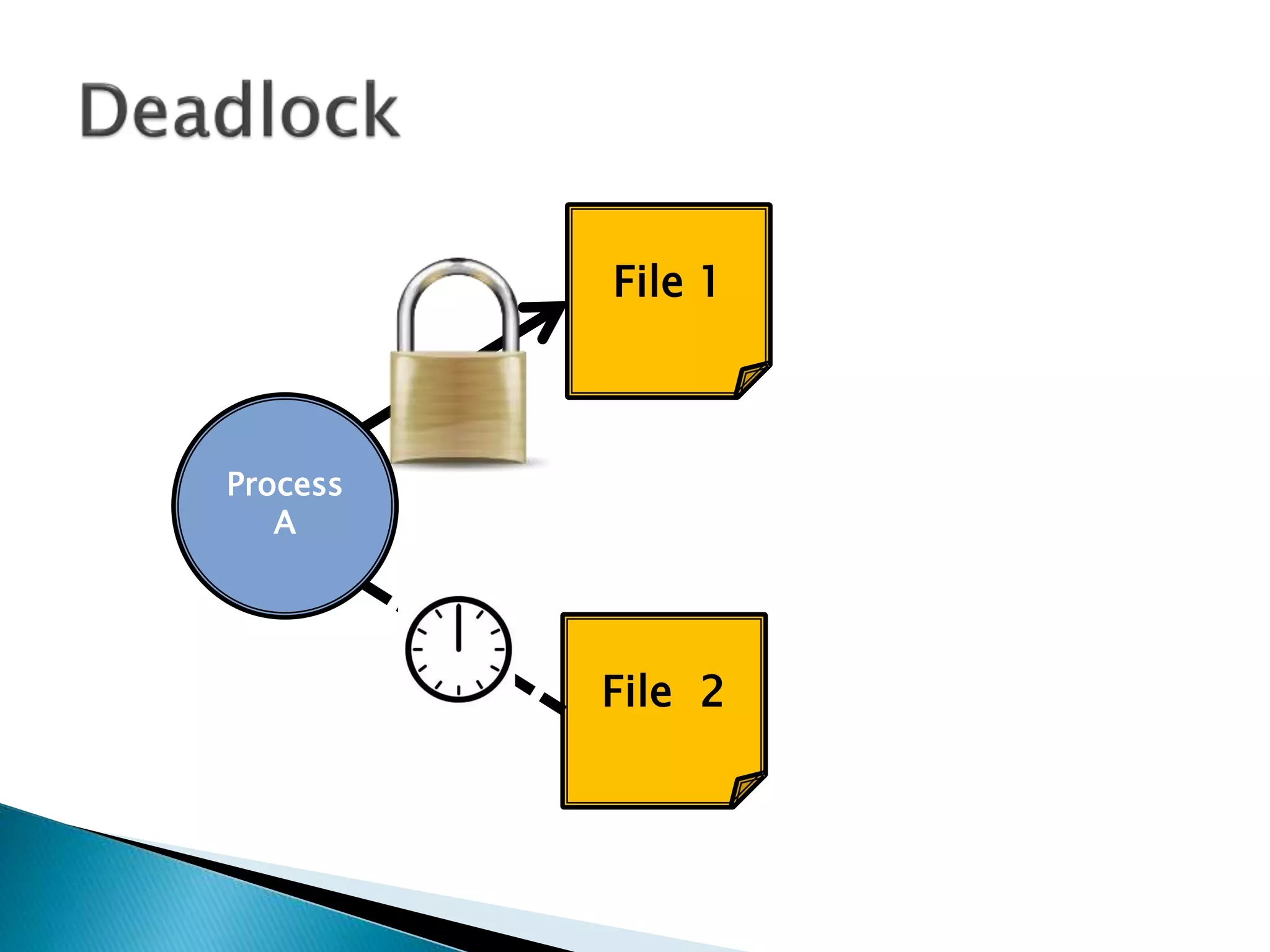
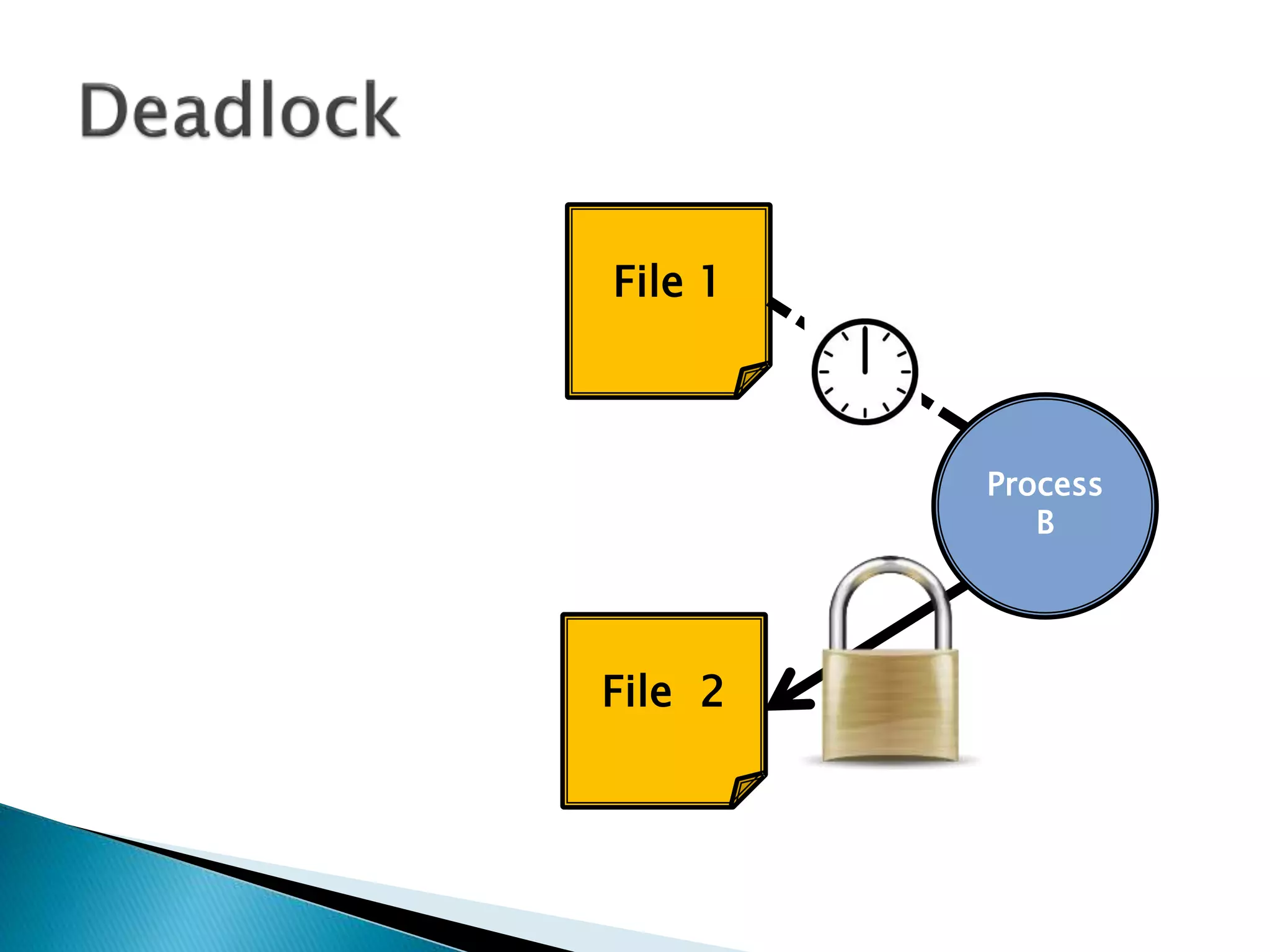
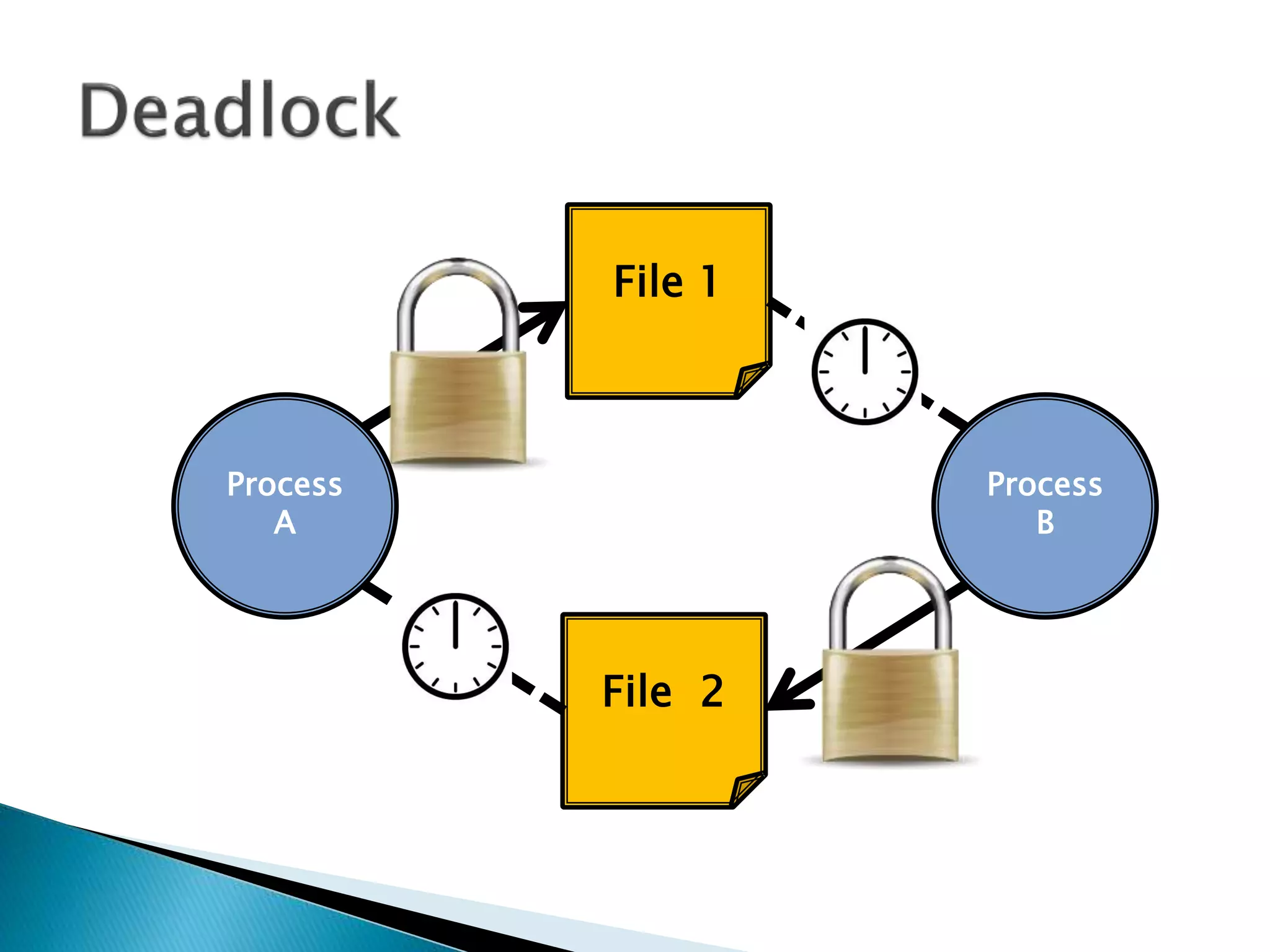
The document discusses several key process scheduling policies and algorithms: 1. Maximum throughput, minimize response time, and other policies aim to optimize different performance metrics like job completion time. 2. Common scheduling algorithms include first come first served (FCFS), shortest job next (SJN), priority scheduling, round robin, and multilevel queues. Each has advantages for different workload types. 3. The document also covers process synchronization challenges like deadlock and livelock that can occur when processes contend for shared resources in certain ordering. Methods to avoid or recover from such issues are important for system design.