Download as PDF, PPTX

![Reference:-
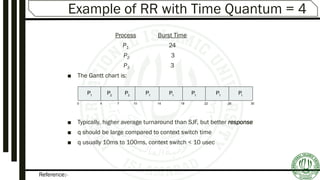
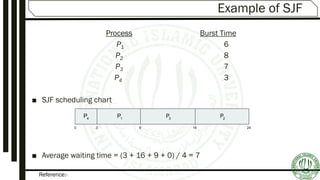
Example of Shortest-remaining-time-first
■ Now we add the concepts of varying arrival times and preemption to the analysis
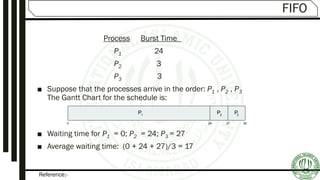
ProcessAarri Arrival TimeT Burst Time
P1 0 8
P2 1 4
P3 2 9
P4 3 5
■ Preemptive SJF Gantt Chart
■ Average waiting time = [(10-1)+(1-1)+(17-2)+5-3)]/4 = 26/4 = 6.5 msec
P4
0 1 26
P1
P2
10
P3
P1
5 17](https://image.slidesharecdn.com/cpu-schedul-161225054822/85/Process-Scheduling-32-320.jpg)
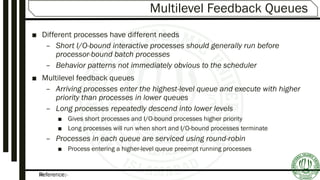
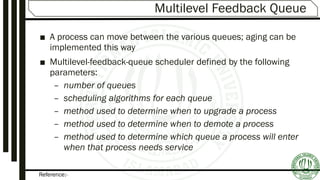
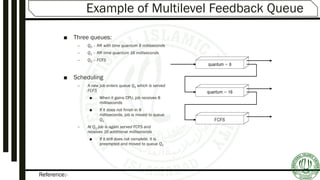

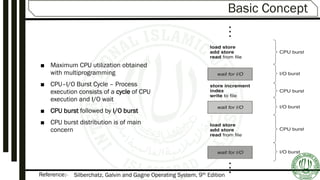
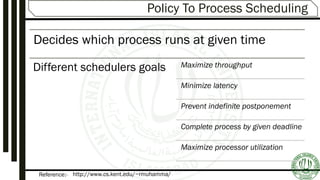
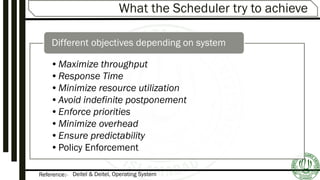
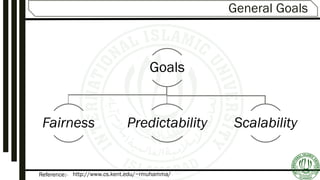
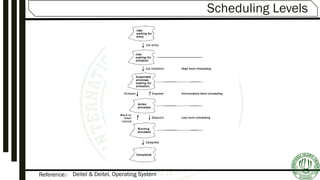
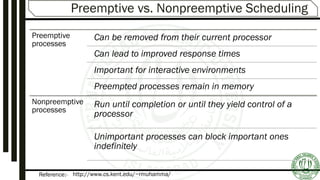
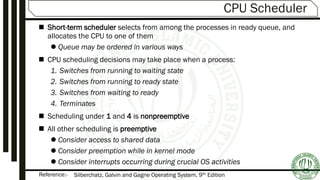
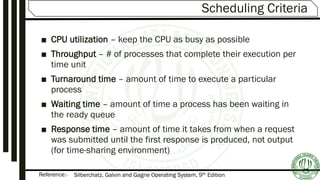
The document discusses various aspects of process scheduling, including the goals, types (preemptive vs. non-preemptive), and criteria for effective scheduling in operating systems. It elaborates on common scheduling algorithms, their advantages, and disadvantages, as well as the importance of optimizing CPU utilization, throughput, and response time. Additionally, the document covers advanced concepts like multilevel queues and multilevel feedback queues to address the needs of different processes.