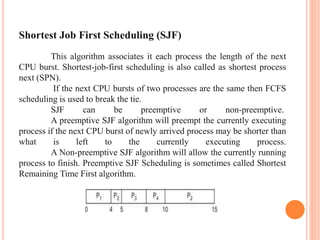
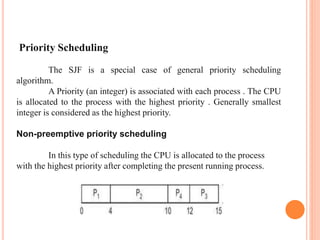
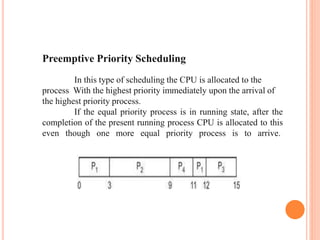
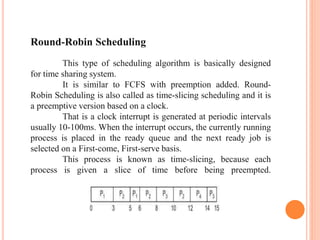
Scheduling is a method used to allocate computing resources like processor time, bandwidth, and memory to processes, threads, and applications. It aims to balance system load, ensure equal distribution of resources, and prioritize processes according to set rules. There are different types of scheduling including long-term, medium-term, and short-term scheduling. Scheduling algorithms decide which process from the ready queue is allocated the CPU based on whether the policy is preemptive or non-preemptive. Common algorithms include first-come first-served, shortest job first, priority scheduling, and round-robin scheduling.