Downloaded 3,921 times







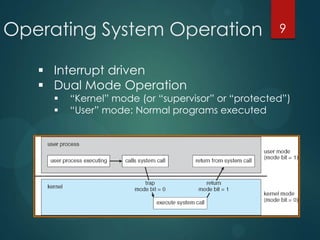
































The document provides an overview of operating systems, including what constitutes an OS (kernel, system programs, application programs), storage device hierarchy, system calls, process creation and states, process scheduling, inter-process communication methods like shared memory and pipes, synchronization techniques like mutexes and semaphores, readers-writers problem, and potential for deadlocks. Key concepts covered include kernel mode vs user mode, process control blocks, context switching, preemption, and requirements for deadlock situations.