Downloaded 403 times


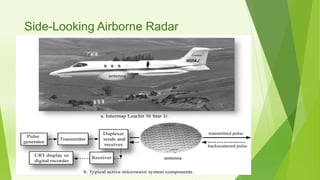





















Microwave remote sensing uses both passive and active sensors operating within the wavelength range of 1mm to 1m. Passive sensors such as microwave radiometers record naturally emitted energy, while active sensors like synthetic aperture radar (SAR) generate their own electromagnetic signals. SAR is an example of side-looking radar that uses signal processing to synthesize a very long antenna and improve azimuth resolution. Radar imagery exhibits characteristics like penetration of vegetation and clouds, day/night imaging, and sensitivity to surface properties. However, it also shows distortions from terrain relief and speckle noise from signal interference.