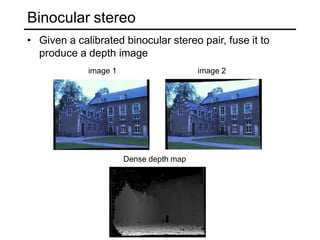
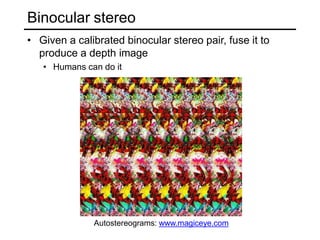
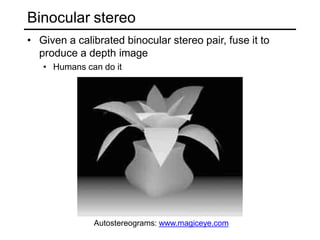
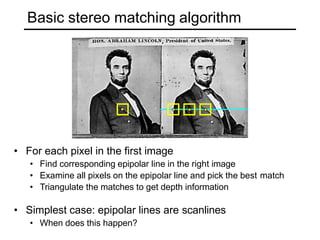
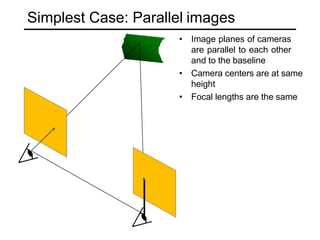
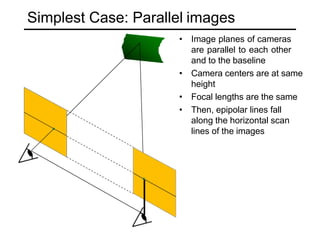
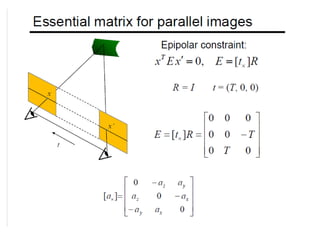
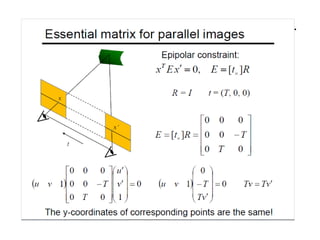
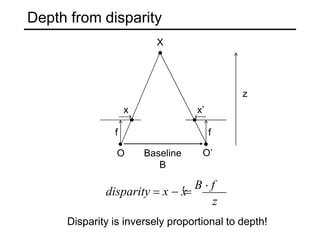
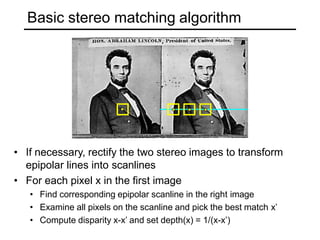
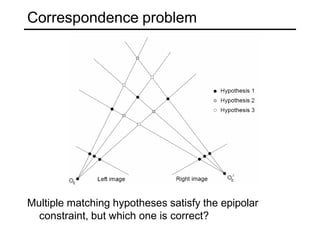
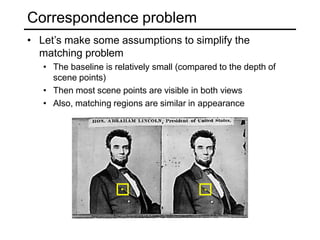
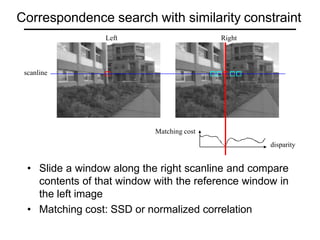
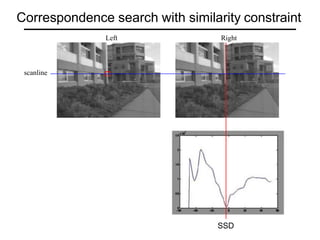
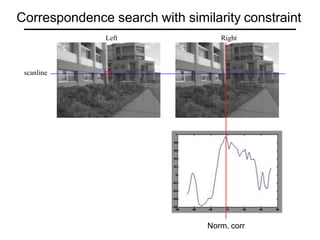
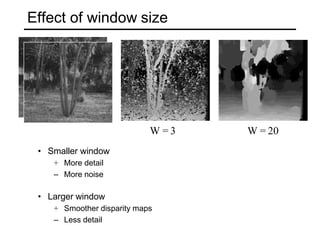
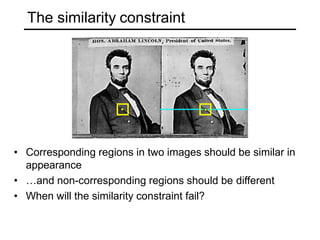
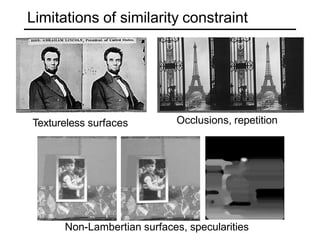
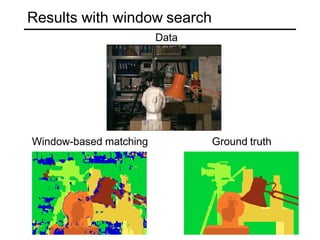
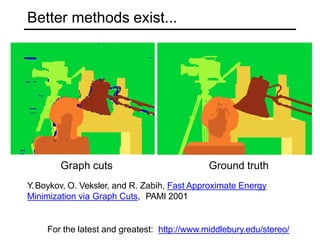
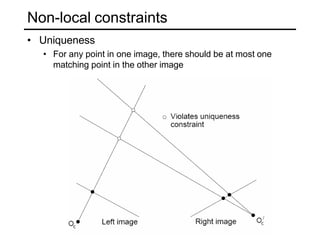
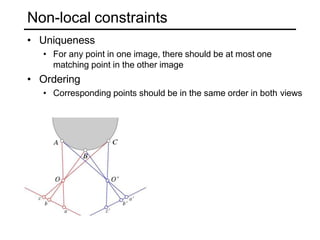
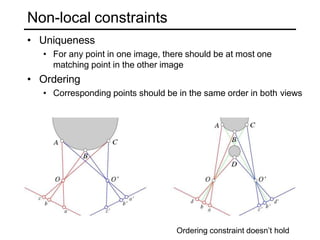
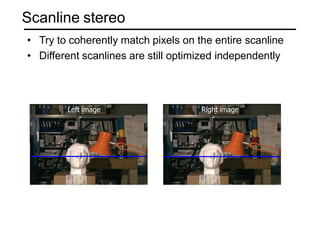
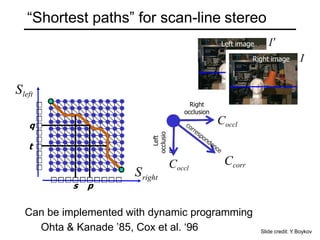
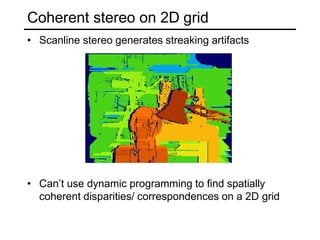
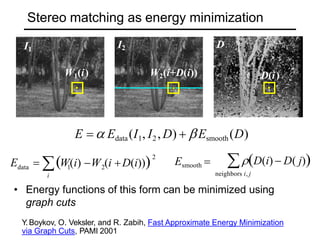
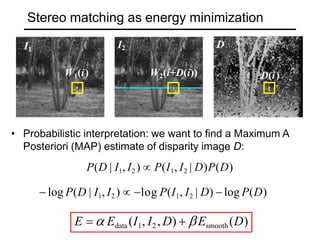
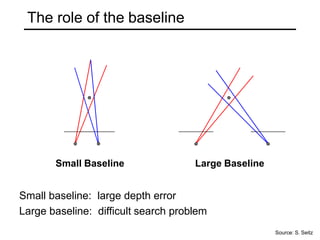
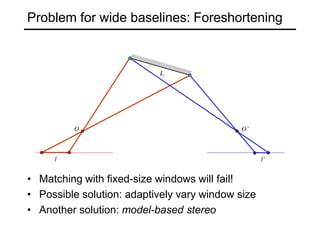
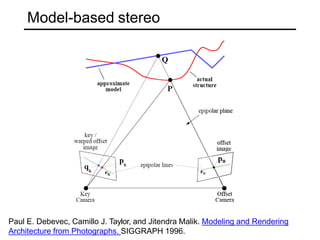
The document discusses binocular stereo vision and methods for estimating depth from stereo image pairs. It describes how humans can perceive depth from stereo vision and basic stereo matching algorithms that find correspondences between left and right images to compute a dense depth map. It also discusses challenges like the correspondence problem and limitations of window-based matching. More advanced methods formulate stereo matching as an energy minimization problem that can be solved using techniques like graph cuts.