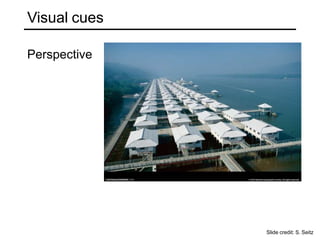
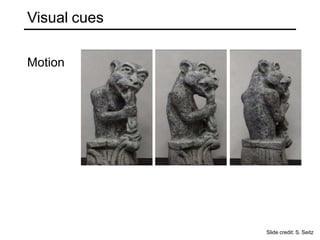
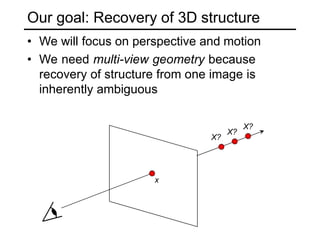
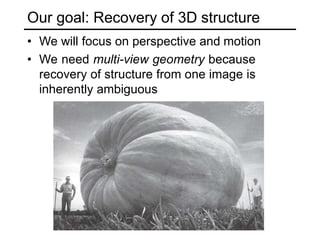
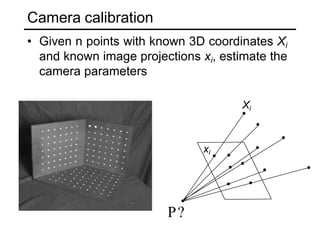
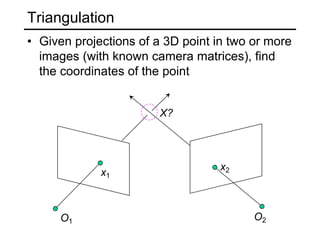
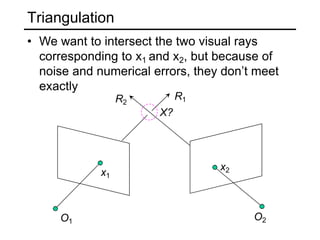
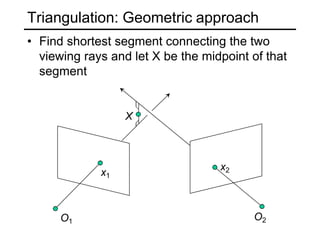
The document discusses single-view geometry and how it aims to recover 3D structure from 2D images. However, recovering structure from a single image is inherently ambiguous. The document then focuses on perspective and motion cues, as well as the need for multi-view geometry. It covers camera calibration, two-view geometry concepts like triangulation, and how triangulation intersects viewing rays from two images to estimate the 3D coordinates of a point.