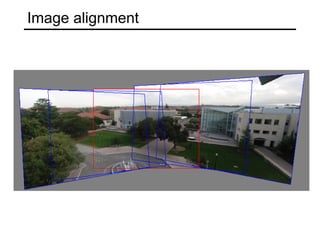
- Image alignment is used for tasks like panorama stitching and object recognition. It involves finding the transformation between two images.
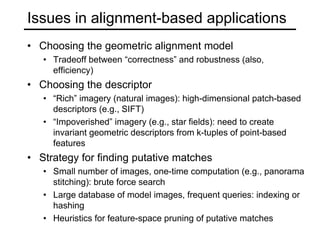
- There are two main approaches: direct/pixel-based alignment searches for pixel agreement, and feature-based alignment searches for agreement between extracted features and can be verified using pixel alignment.
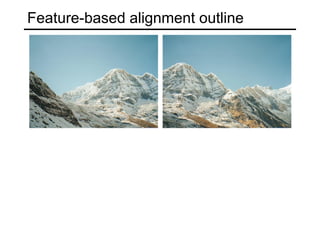
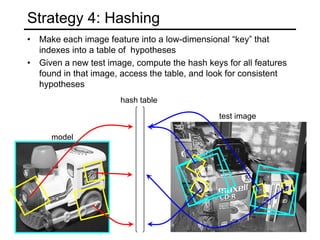
- Feature-based alignment first extracts features, computes putative matches between features, then hypothesizes and verifies transformations between small groups of matches.

























































![Computer Vision - Unit-II [Repaired].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/computervision-unit-iirepaired-251223052721-8dd262a0-thumbnail.jpg?width=640&height=640&fit=bounds)




























































