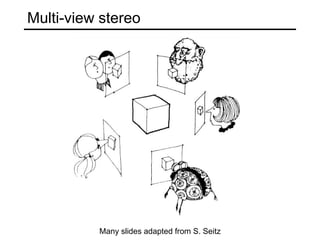
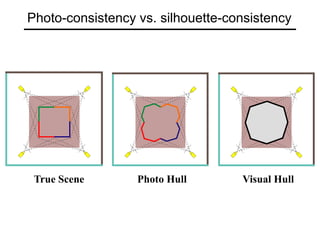
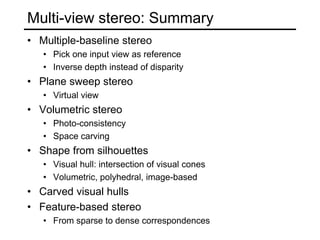
Multi-view stereo techniques allow reconstructing 3D shape from multiple images by exploiting redundant information across viewpoints. Key approaches include plane sweep stereo which reconstructs depth maps in a reference view, volumetric stereo which represents scenes as voxel volumes colored by photo-consistency, and visual hulls which find the maximal shape consistent with silhouette cues. Advanced techniques integrate features, optimize photo-consistency, and leverage internet photo collections.