This document discusses two-view geometry and epipolar constraints. It defines key concepts like epipolar planes, epipoles, epipolar lines, and the baseline. It explains that corresponding points in two images must lie on corresponding epipolar lines. It describes how the essential and fundamental matrices encode the epipolar geometry and constrain correspondences. It introduces algorithms like the eight-point algorithm and normalized eight-point algorithm to estimate the fundamental matrix from point correspondences. It concludes by explaining how camera calibration allows estimating the essential matrix and extrinsic camera parameters from the fundamental matrix.
This slides about brief Introduction to Image Restoration Techniques. How to estimate the degradation function, noise models and its probability density functions.
This slides about brief Introduction to Image Restoration Techniques. How to estimate the degradation function, noise models and its probability density functions.
Lec1: Medical Image Computing - Introduction Ulaş Bağcı
2017 Spring, UCF Medical Image Computing Course
Basics of Radiological Image Modalities and their clinical use (MRI, PET, CT, fMRI, DTI, ...)
• Introduction to Medical Image Computing and Toolkits
• Image Filtering, Enhancement, Noise Reduction, and
Signal Processing
• MedicalImageRegistration
• MedicalImageSegmentation
• MedicalImageVisualization
• Machine Learning in Medical Imaging
• Shape Modeling/Analysis of Medical Images
Deep Learning in Radiology
Image segmentation techniques
More information on this research can be found in:
Hussein, Rania, Frederic D. McKenzie. “Identifying Ambiguous Prostate Gland Contours from Histology Using Capsule Shape Information and Least Squares Curve Fitting.” The International Journal of Computer Assisted Radiology and Surgery ( IJCARS), Volume 2 Numbers 3-4, pp. 143-150, December 2007.
Digital image processing is the use of computer algorithms to perform image processing on digital images. As a subcategory or field of digital signal processing, digital image processing has many advantages over analog image processing.
its very useful for students.
Sharpening process in spatial domain
Direct Manipulation of image Pixels.
The objective of Sharpening is to highlight transitions in intensity
The image blurring is accomplished by pixel averaging in a neighborhood.
Since averaging is analogous to integration.
Prepared by
M. Sahaya Pretha
Department of Computer Science and Engineering,
MS University, Tirunelveli Dist, Tamilnadu.
Lecture 9: Dimensionality Reduction, Singular Value Decomposition (SVD), Principal Component Analysis (PCA). (ppt,pdf)
Appendices A, B from the book “Introduction to Data Mining” by Tan, Steinbach, Kumar.
Lec1: Medical Image Computing - Introduction Ulaş Bağcı
2017 Spring, UCF Medical Image Computing Course
Basics of Radiological Image Modalities and their clinical use (MRI, PET, CT, fMRI, DTI, ...)
• Introduction to Medical Image Computing and Toolkits
• Image Filtering, Enhancement, Noise Reduction, and
Signal Processing
• MedicalImageRegistration
• MedicalImageSegmentation
• MedicalImageVisualization
• Machine Learning in Medical Imaging
• Shape Modeling/Analysis of Medical Images
Deep Learning in Radiology
Image segmentation techniques
More information on this research can be found in:
Hussein, Rania, Frederic D. McKenzie. “Identifying Ambiguous Prostate Gland Contours from Histology Using Capsule Shape Information and Least Squares Curve Fitting.” The International Journal of Computer Assisted Radiology and Surgery ( IJCARS), Volume 2 Numbers 3-4, pp. 143-150, December 2007.
Digital image processing is the use of computer algorithms to perform image processing on digital images. As a subcategory or field of digital signal processing, digital image processing has many advantages over analog image processing.
its very useful for students.
Sharpening process in spatial domain
Direct Manipulation of image Pixels.
The objective of Sharpening is to highlight transitions in intensity
The image blurring is accomplished by pixel averaging in a neighborhood.
Since averaging is analogous to integration.
Prepared by
M. Sahaya Pretha
Department of Computer Science and Engineering,
MS University, Tirunelveli Dist, Tamilnadu.
Lecture 9: Dimensionality Reduction, Singular Value Decomposition (SVD), Principal Component Analysis (PCA). (ppt,pdf)
Appendices A, B from the book “Introduction to Data Mining” by Tan, Steinbach, Kumar.
is a range imaging technique; it refers to the process of estimating three-dimensional structures from two-dimensional image sequences which may be coupled with local motion signals
Image Acquisition and Representation
A Simple Image Formation Model
Image Sampling and Quantization
Image Interpolation
Image quantization
Nearest Neighbor Interpolation
Instructions for Submissions thorugh G- Classroom.pptxJheel Barad
This presentation provides a briefing on how to upload submissions and documents in Google Classroom. It was prepared as part of an orientation for new Sainik School in-service teacher trainees. As a training officer, my goal is to ensure that you are comfortable and proficient with this essential tool for managing assignments and fostering student engagement.
Operation “Blue Star” is the only event in the history of Independent India where the state went into war with its own people. Even after about 40 years it is not clear if it was culmination of states anger over people of the region, a political game of power or start of dictatorial chapter in the democratic setup.
The people of Punjab felt alienated from main stream due to denial of their just demands during a long democratic struggle since independence. As it happen all over the word, it led to militant struggle with great loss of lives of military, police and civilian personnel. Killing of Indira Gandhi and massacre of innocent Sikhs in Delhi and other India cities was also associated with this movement.
June 3, 2024 Anti-Semitism Letter Sent to MIT President Kornbluth and MIT Cor...Levi Shapiro
Letter from the Congress of the United States regarding Anti-Semitism sent June 3rd to MIT President Sally Kornbluth, MIT Corp Chair, Mark Gorenberg
Dear Dr. Kornbluth and Mr. Gorenberg,
The US House of Representatives is deeply concerned by ongoing and pervasive acts of antisemitic
harassment and intimidation at the Massachusetts Institute of Technology (MIT). Failing to act decisively to ensure a safe learning environment for all students would be a grave dereliction of your responsibilities as President of MIT and Chair of the MIT Corporation.
This Congress will not stand idly by and allow an environment hostile to Jewish students to persist. The House believes that your institution is in violation of Title VI of the Civil Rights Act, and the inability or
unwillingness to rectify this violation through action requires accountability.
Postsecondary education is a unique opportunity for students to learn and have their ideas and beliefs challenged. However, universities receiving hundreds of millions of federal funds annually have denied
students that opportunity and have been hijacked to become venues for the promotion of terrorism, antisemitic harassment and intimidation, unlawful encampments, and in some cases, assaults and riots.
The House of Representatives will not countenance the use of federal funds to indoctrinate students into hateful, antisemitic, anti-American supporters of terrorism. Investigations into campus antisemitism by the Committee on Education and the Workforce and the Committee on Ways and Means have been expanded into a Congress-wide probe across all relevant jurisdictions to address this national crisis. The undersigned Committees will conduct oversight into the use of federal funds at MIT and its learning environment under authorities granted to each Committee.
• The Committee on Education and the Workforce has been investigating your institution since December 7, 2023. The Committee has broad jurisdiction over postsecondary education, including its compliance with Title VI of the Civil Rights Act, campus safety concerns over disruptions to the learning environment, and the awarding of federal student aid under the Higher Education Act.
• The Committee on Oversight and Accountability is investigating the sources of funding and other support flowing to groups espousing pro-Hamas propaganda and engaged in antisemitic harassment and intimidation of students. The Committee on Oversight and Accountability is the principal oversight committee of the US House of Representatives and has broad authority to investigate “any matter” at “any time” under House Rule X.
• The Committee on Ways and Means has been investigating several universities since November 15, 2023, when the Committee held a hearing entitled From Ivory Towers to Dark Corners: Investigating the Nexus Between Antisemitism, Tax-Exempt Universities, and Terror Financing. The Committee followed the hearing with letters to those institutions on January 10, 202
Francesca Gottschalk - How can education support child empowerment.pptxEduSkills OECD
Francesca Gottschalk from the OECD’s Centre for Educational Research and Innovation presents at the Ask an Expert Webinar: How can education support child empowerment?
Macroeconomics- Movie Location
This will be used as part of your Personal Professional Portfolio once graded.
Objective:
Prepare a presentation or a paper using research, basic comparative analysis, data organization and application of economic information. You will make an informed assessment of an economic climate outside of the United States to accomplish an entertainment industry objective.
Synthetic Fiber Construction in lab .pptxPavel ( NSTU)
Synthetic fiber production is a fascinating and complex field that blends chemistry, engineering, and environmental science. By understanding these aspects, students can gain a comprehensive view of synthetic fiber production, its impact on society and the environment, and the potential for future innovations. Synthetic fibers play a crucial role in modern society, impacting various aspects of daily life, industry, and the environment. ynthetic fibers are integral to modern life, offering a range of benefits from cost-effectiveness and versatility to innovative applications and performance characteristics. While they pose environmental challenges, ongoing research and development aim to create more sustainable and eco-friendly alternatives. Understanding the importance of synthetic fibers helps in appreciating their role in the economy, industry, and daily life, while also emphasizing the need for sustainable practices and innovation.
Embracing GenAI - A Strategic ImperativePeter Windle
Artificial Intelligence (AI) technologies such as Generative AI, Image Generators and Large Language Models have had a dramatic impact on teaching, learning and assessment over the past 18 months. The most immediate threat AI posed was to Academic Integrity with Higher Education Institutes (HEIs) focusing their efforts on combating the use of GenAI in assessment. Guidelines were developed for staff and students, policies put in place too. Innovative educators have forged paths in the use of Generative AI for teaching, learning and assessments leading to pockets of transformation springing up across HEIs, often with little or no top-down guidance, support or direction.
This Gasta posits a strategic approach to integrating AI into HEIs to prepare staff, students and the curriculum for an evolving world and workplace. We will highlight the advantages of working with these technologies beyond the realm of teaching, learning and assessment by considering prompt engineering skills, industry impact, curriculum changes, and the need for staff upskilling. In contrast, not engaging strategically with Generative AI poses risks, including falling behind peers, missed opportunities and failing to ensure our graduates remain employable. The rapid evolution of AI technologies necessitates a proactive and strategic approach if we are to remain relevant.
The French Revolution, which began in 1789, was a period of radical social and political upheaval in France. It marked the decline of absolute monarchies, the rise of secular and democratic republics, and the eventual rise of Napoleon Bonaparte. This revolutionary period is crucial in understanding the transition from feudalism to modernity in Europe.
For more information, visit-www.vavaclasses.com
Acetabularia Information For Class 9 .docxvaibhavrinwa19
Acetabularia acetabulum is a single-celled green alga that in its vegetative state is morphologically differentiated into a basal rhizoid and an axially elongated stalk, which bears whorls of branching hairs. The single diploid nucleus resides in the rhizoid.
How to Make a Field invisible in Odoo 17Celine George
It is possible to hide or invisible some fields in odoo. Commonly using “invisible” attribute in the field definition to invisible the fields. This slide will show how to make a field invisible in odoo 17.
2. • Epipolar Plane – plane containing baseline (1D family)
• Epipoles
= intersections of baseline with image planes
= projections of the other camera center
= vanishing points of camera motion direction
• Epipolar Lines - intersections of epipolar plane with image
planes (always come in corresponding pairs)
• Baseline – line connecting the two camera centers
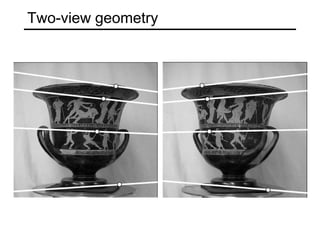
Epipolar geometry
X
x x’
6. Epipolar constraint
• If we observe a point x in one image, where
can the corresponding point x’ be in the other
image?
x x’
X
7. • Potential matches for x have to lie on the corresponding
epipolar line l’.
• Potential matches for x’ have to lie on the corresponding
epipolar line l.
Epipolar constraint
x x’
X
x’
X
x’
X
9. X
x x’
Epipolar constraint: Calibrated case
• Assume that the intrinsic and extrinsic parameters of the
cameras are known
• We can multiply the projection matrix of each camera (and the
image points) by the inverse of the calibration matrix to get
normalized image coordinates
• We can also set the global coordinate system to the coordinate
system of the first camera
10. X
x x’
Epipolar constraint: Calibrated case
Camera matrix: [I|0]
X = (u, v, w, 1)T
x = (u, v, w)T
Camera matrix: [RT | –RTt]
Vector x’ in second coord.
system has coordinates
Rx’ in the first one
R
t
The vectors x, t, and Rx’ are coplanar
= RX’ + t
12. X
x x’
Epipolar constraint: Calibrated case
• E x’ is the epipolar line associated with x’ (l = E x’)
• ETx is the epipolar line associated with x (l’ = ETx)
• E e’ = 0 and ETe = 0
• E is singular (rank two)
• E has five degrees of freedom
0
)]
(
[ =
′
×
⋅ x
R
t
x R
t
E
x
E
xT
]
[
with
0 ×
=
=
′
13. Epipolar constraint: Uncalibrated case
• The calibration matrices K and K’ of the two
cameras are unknown
• We can write the epipolar constraint in terms
of unknown normalized coordinates:
X
x x’
0
ˆ
ˆ =
′
x
E
xT
x
K
x
x
K
x ′
′
=
′
= ˆ
,
ˆ
14. Epipolar constraint: Uncalibrated case
X
x x’
Fundamental Matrix
(Faugeras and Luong, 1992)
0
ˆ
ˆ =
′
x
E
xT
x
K
x
x
K
x
′
′
=
′
=
ˆ
ˆ
1
with
0 −
−
′
=
=
′ K
E
K
F
x
F
x T
T
15. Epipolar constraint: Uncalibrated case
0
ˆ
ˆ =
′
x
E
xT 1
with
0 −
−
′
=
=
′ K
E
K
F
x
F
x T
T
• F x’ is the epipolar line associated with x’ (l = F x’)
• FTx is the epipolar line associated with x (l’ = FTx)
• F e’ = 0 and FTe = 0
• F is singular (rank two)
• F has seven degrees of freedom
X
x x’
16. The eight-point algorithm
x = (u, v, 1)T, x’ = (u’, v’, 1)T
Minimize:
under the constraint
|F|2 = 1
2
1
)
( i
N
i
T
i x
F
x ′
∑
=
17. The eight-point algorithm
• Meaning of error
sum of Euclidean distances between points xi
and epipolar lines Fx’i (or points x’i and
epipolar lines FTxi) multiplied by a scale factor
• Nonlinear approach: minimize
:
)
( 2
1
i
N
i
T
i x
F
x ′
∑
=
[ ]
∑
=
′
+
′
N
i
i
T
i
i
i x
F
x
x
F
x
1
2
2
)
,
(
d
)
,
(
d
19. Problem with eight-point algorithm
Poor numerical conditioning
Can be fixed by rescaling the data
20. The normalized eight-point algorithm
• Center the image data at the origin, and scale it so
the mean squared distance between the origin and
the data points is 2 pixels
• Use the eight-point algorithm to compute F from the
normalized points
• Enforce the rank-2 constraint (for example, take SVD
of F and throw out the smallest singular value)
• Transform fundamental matrix back to original units:
if T and T’ are the normalizing transformations in the
two images, than the fundamental matrix in original
coordinates is TT F T’
(Hartley, 1995)
21. Comparison of estimation algorithms
8-point Normalized 8-point Nonlinear least squares
Av. Dist. 1 2.33 pixels 0.92 pixel 0.86 pixel
Av. Dist. 2 2.18 pixels 0.85 pixel 0.80 pixel
22. From epipolar geometry to camera calibration
• Estimating the fundamental matrix is known
as “weak calibration”
• If we know the calibration matrices of the two
cameras, we can estimate the essential
matrix: E = KTFK’
• The essential matrix gives us the relative
rotation and translation between the cameras,
or their extrinsic parameters
23. Assignment 3 (due March 17)
http://www.cs.unc.edu/~lazebnik/spring09/assignment3.html