This document describes SURF (Speeded Up Robust Features), a feature detection and description algorithm. SURF approximates or outperforms previous schemes in terms of repeatability, distinctiveness, and robustness, while being faster to compute. It relies on integral images for image convolutions and combines a Hessian matrix-based detector with a distribution-based descriptor. Experimental results show SURF outperforms SIFT, GLOH, and other descriptors in object recognition tasks under various image conditions, while being significantly faster to compute.
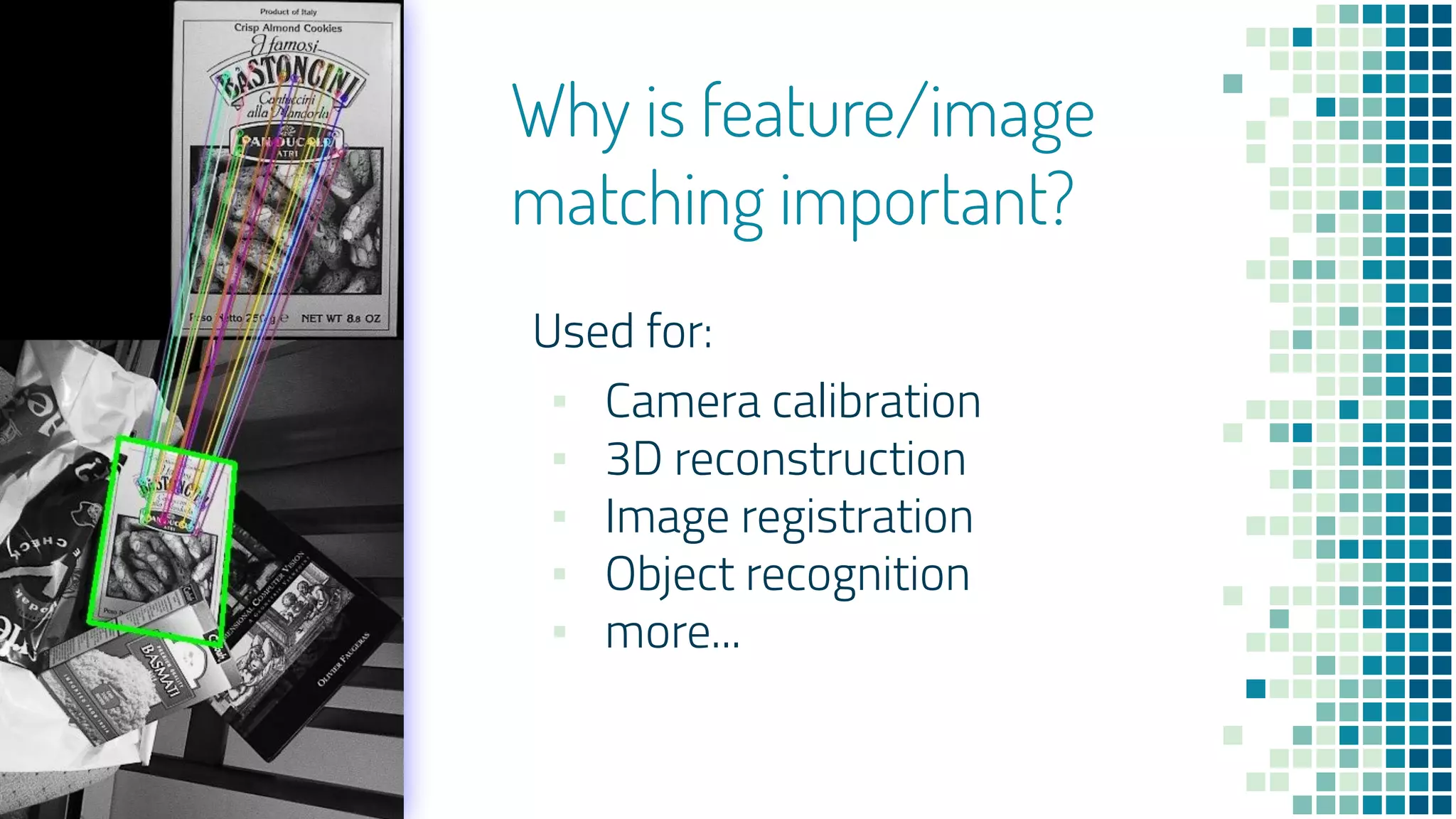
Why is feature/image
matchingimportant?
Used for:
▪ Camera calibration
▪ 3D reconstruction
▪ Image registration
▪ Object recognition
▪ more...
3
4.
How do wesearch for discrete image
correspondences?
First Step
‘Interest Points’ are
selected at distinctive
locations in the image,
such as corners, blobs,
and T-junctions
Second Step
The neighbourhood of
every interest point is
represented by a
feature vector.
Third Step
The descriptor vectors
are matched between
different images.
This matching is often
based on a distance
between the vectors
(e.g. Mahalanobis or
Euclidean distance)
4
5.
Main Challenges
Types ofvariance:
▪ Illumination
▪ Scale
▪ Rotation
▪ Affine
▪ Perspective
Achieving:
▪ Repeatability
▪ Distinctiveness
While the
Detector/Descriptor:
▪ Is faster to
compute
▪ Maintains good
performance
5
Approximates or evenoutperforms previously proposed
schemes with respect to repeatability, distinctiveness, and
robustness, yet can be computed and compared much faster.
Achieved by:
- relying on integral images for image convolutions
- building on the strengths of the leading existing detectors
and descriptors (using a Hessian matrix-based measure for the
detector, and a distribution-based descriptor)
- simplifying these methods to the essential
This leads to a combination of novel detection, description,
and matching steps.
7
Interest Point Detection
▪Harris corner detector
▫ Most widely used; based on the eigenvalues; not
scale-invariant
▪ Automatic scale detection detector
▫ Experimented both the determinant of the Hessian matrix
as well as Laplacian
▪ Scale-invariant feature detectors
▫ Harris-Laplace and Hessian-Laplace; The location is
selected by the determinant of Hessian matrix; The scale is
selected by the Laplacian
▪ SIFT - most appealing descriptor for practical uses
▫ Approximated the LoG by a DoG filter
9
10.
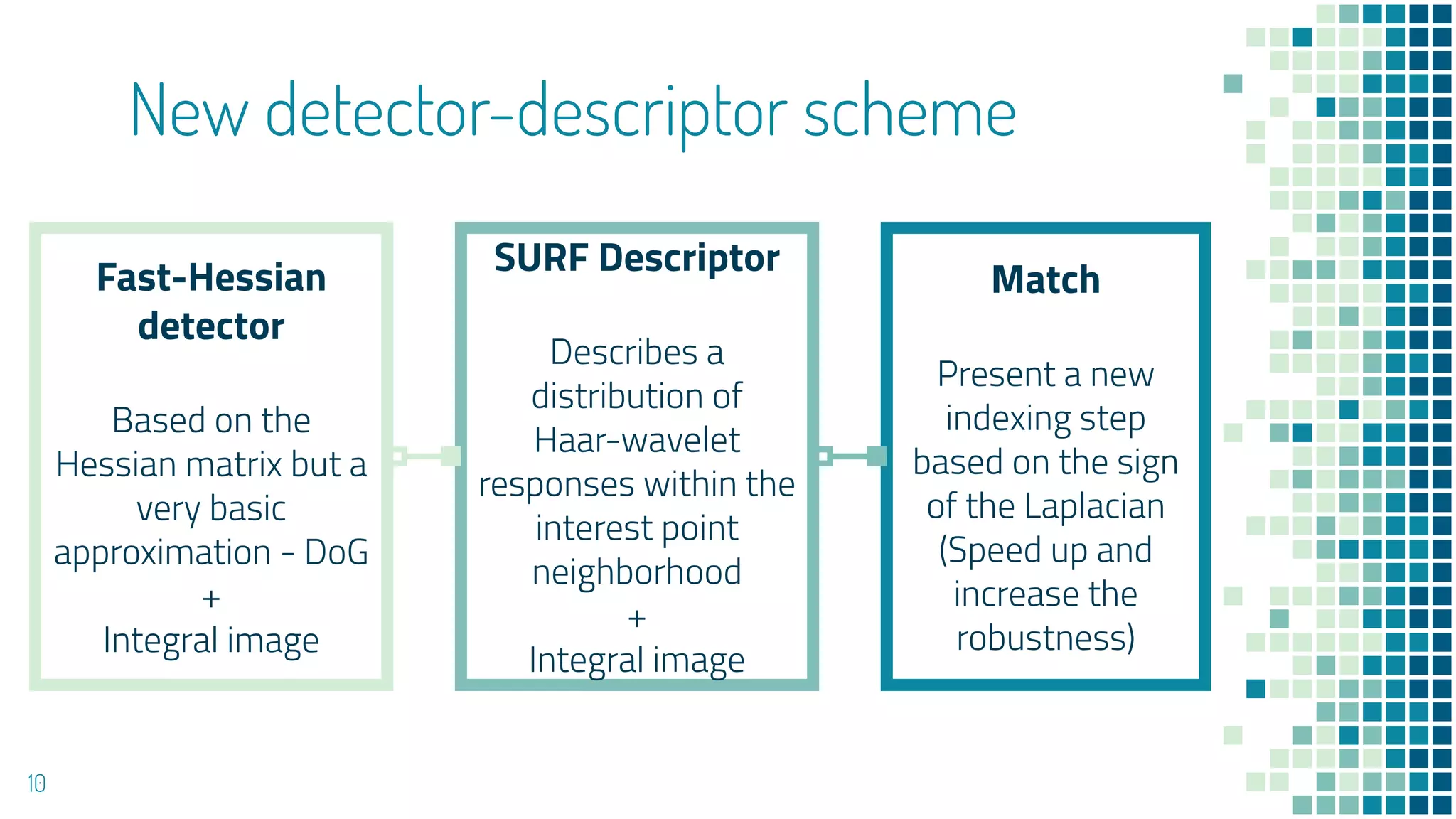
New detector-descriptor scheme
10
Fast-Hessian
detector
Basedon the
Hessian matrix but a
very basic
approximation - DoG
+
Integral image
Match
Present a new
indexing step
based on the sign
of the Laplacian
(Speed up and
increase the
robustness)
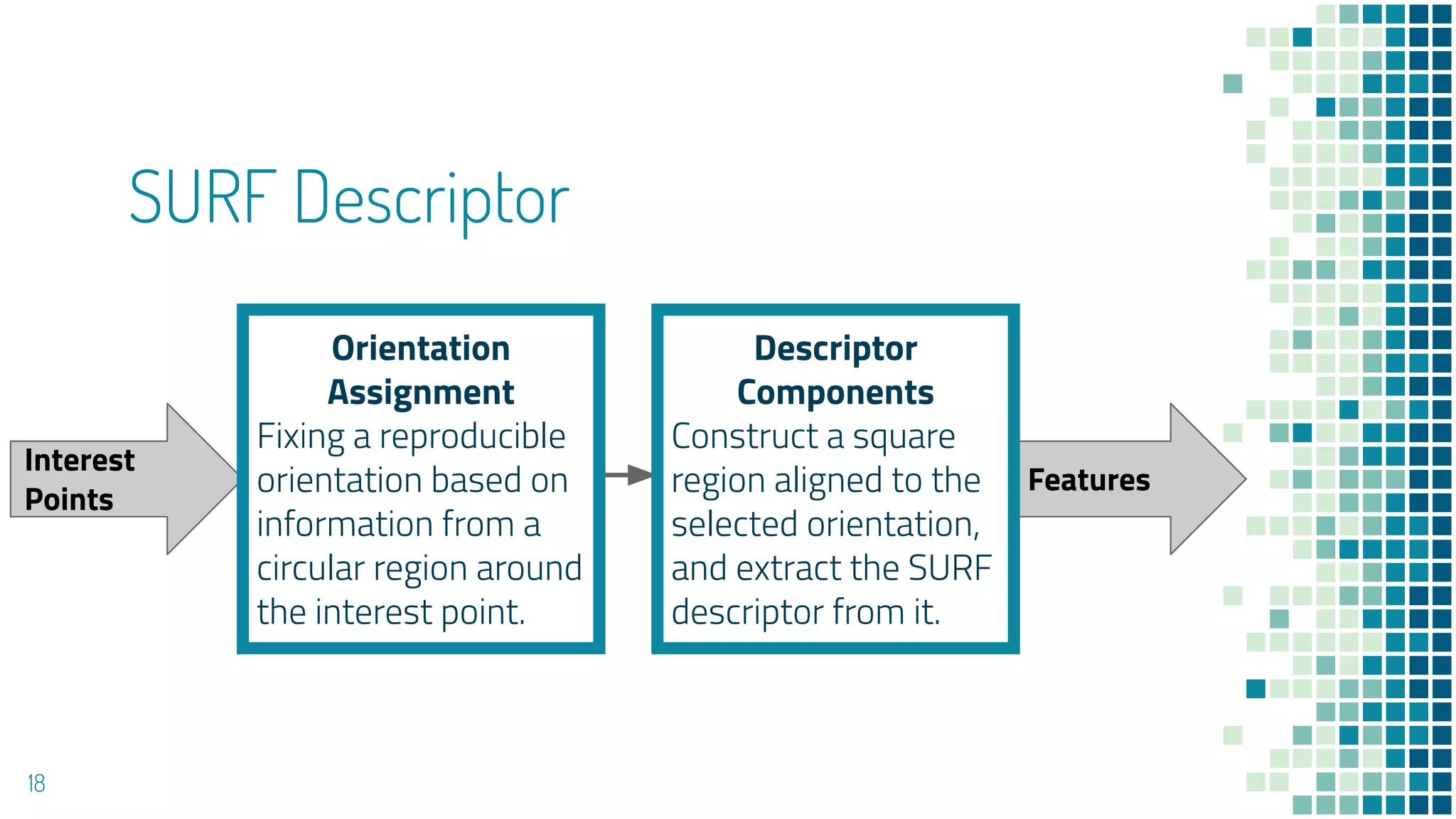
SURF Descriptor
Describes a
distribution of
Haar-wavelet
responses within the
interest point
neighborhood
+
Integral image
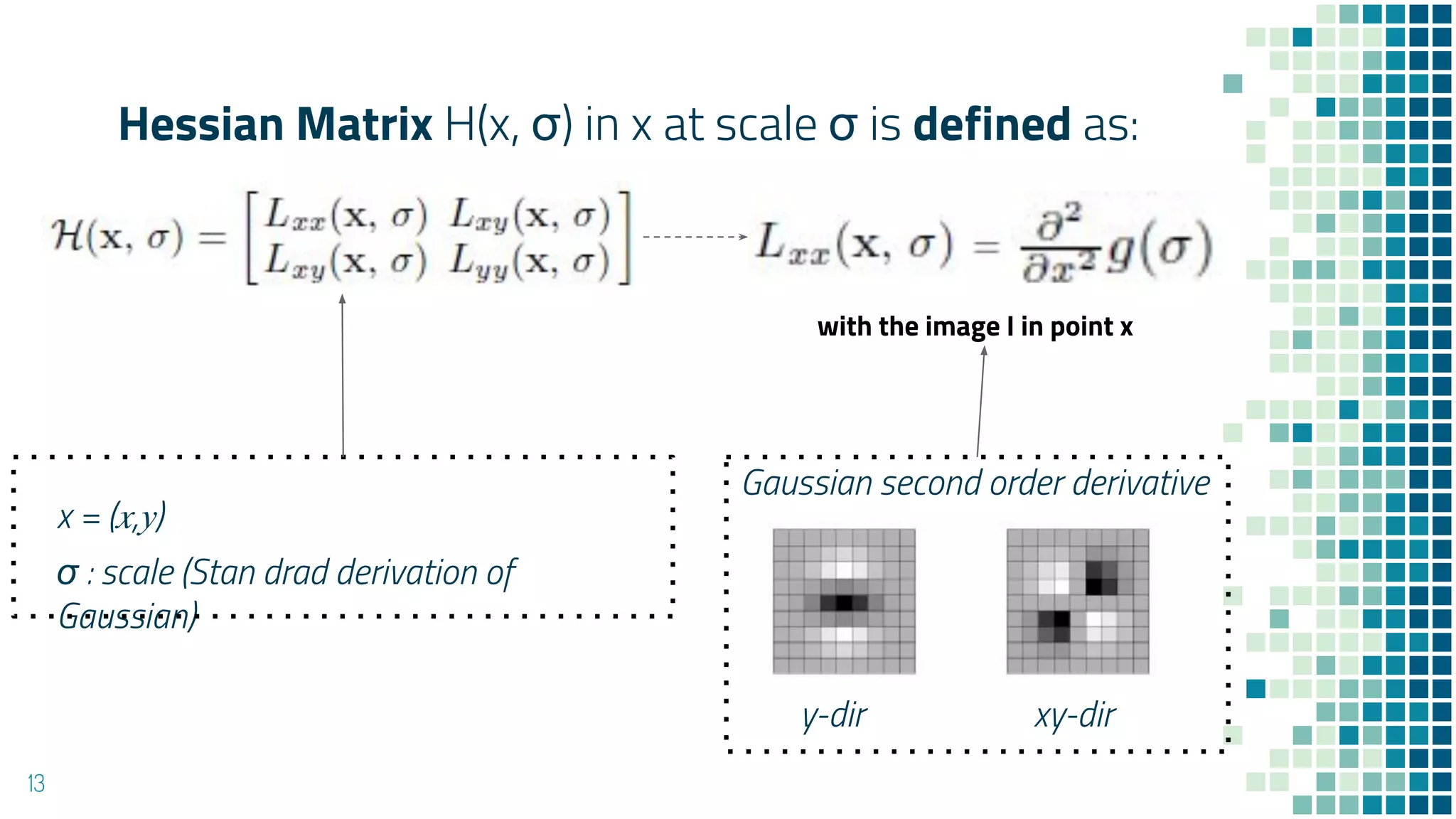
Hessian Matrix H(x,σ) in x at scale σ is defined as:
13
x = ( 𝑥, 𝑦)
σ : scale (Stan drad derivation of
Gaussian)
with the image I in point x
Gaussian second order derivative
y-dir xy-dir
14.
Approximation LoG withbox filters => DoG
14
Box filters (instead of Gaussian)
y-dir xy-dir
9x9 box filter with σ =1.2
15.
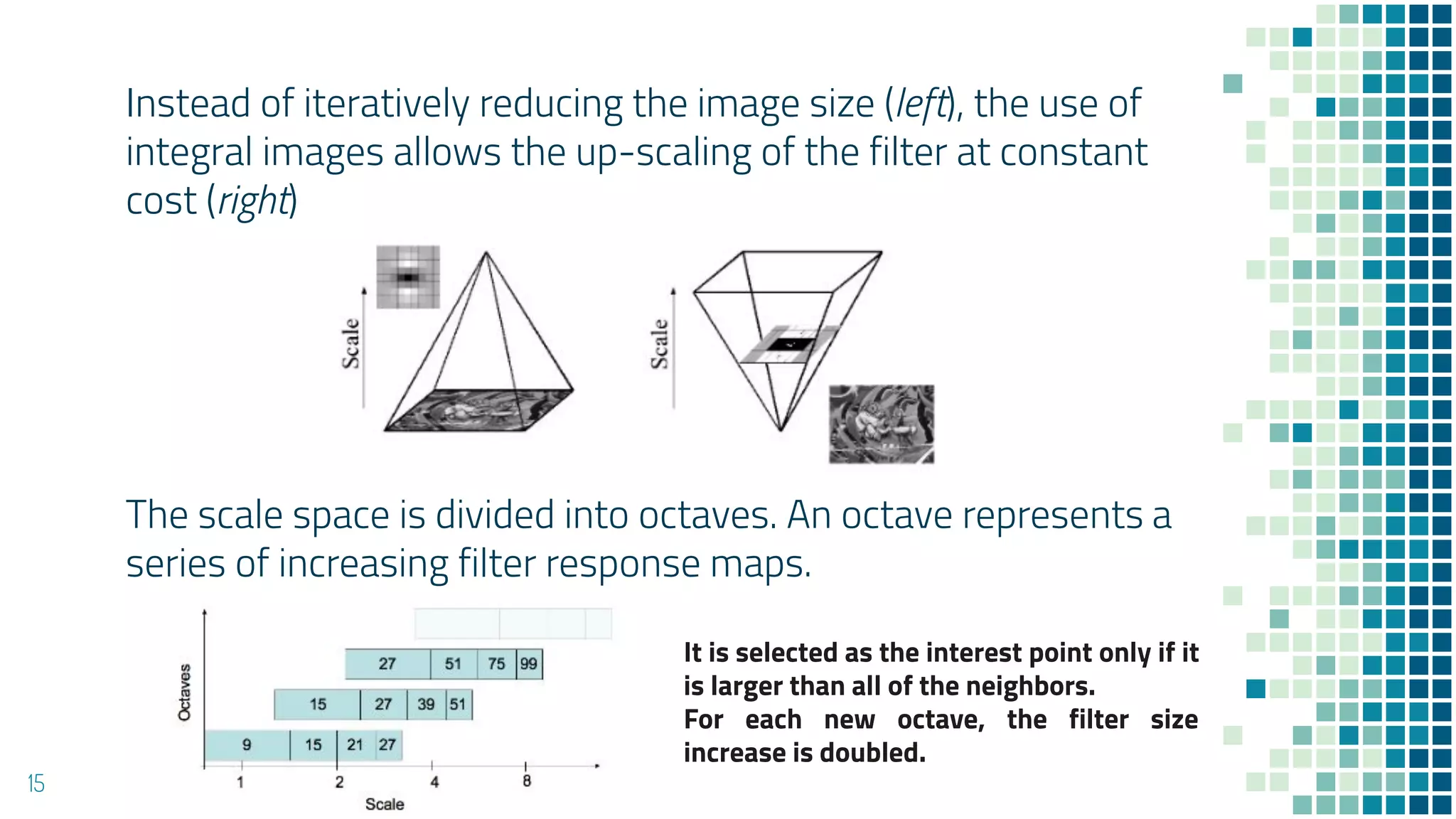
Instead of iterativelyreducing the image size (left), the use of
integral images allows the up-scaling of the filter at constant
cost (right)
15
The scale space is divided into octaves. An octave represents a
series of increasing filter response maps.
It is selected as the interest point only if it
is larger than all of the neighbors.
For each new octave, the filter size
increase is doubled.
16.
Scale space interpolationis especially important in our case, as the
difference in scale between the first layers of every octave is
relatively large.
16
In the figure we can see the detected interest points for a Sunflower
field. This kind of scenes shows clearly the nature of the features from
Hessian-based detectors.
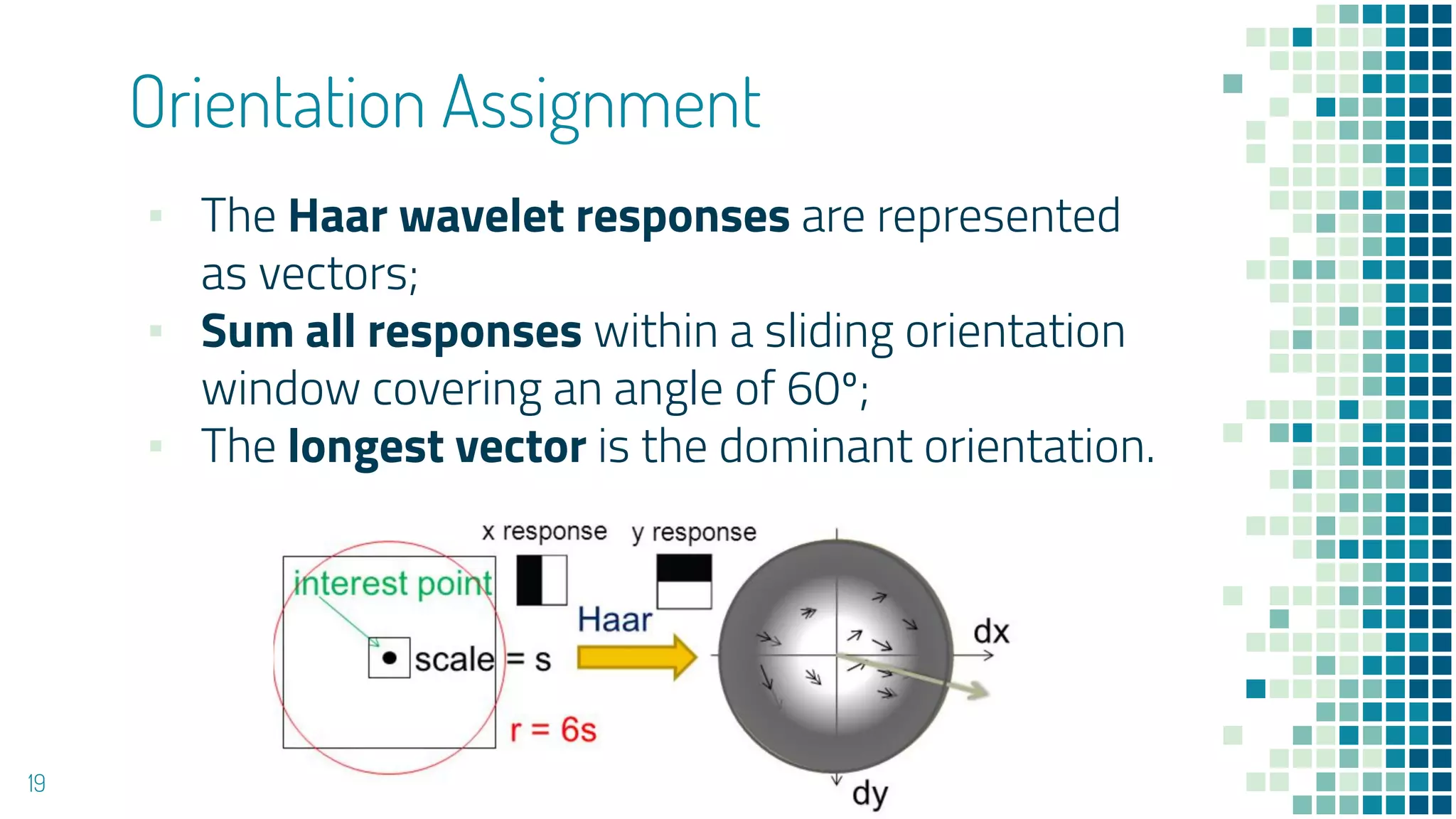
Orientation Assignment
▪ TheHaar wavelet responses are represented
as vectors;
▪ Sum all responses within a sliding orientation
window covering an angle of 60º;
▪ The longest vector is the dominant orientation.
19
20.
Orientation Assignment -Haar wavelet filters
▪ We can use integral images for fast filtering.
The used filters are shown in the image below.
Only six operations are needed to compute the
response in x or y direction at any scale
20
Haar wavelet filters to compute the responses in x (left) and y direction
(right). The dark parts have the weight -1 and the light parts +1.
21.
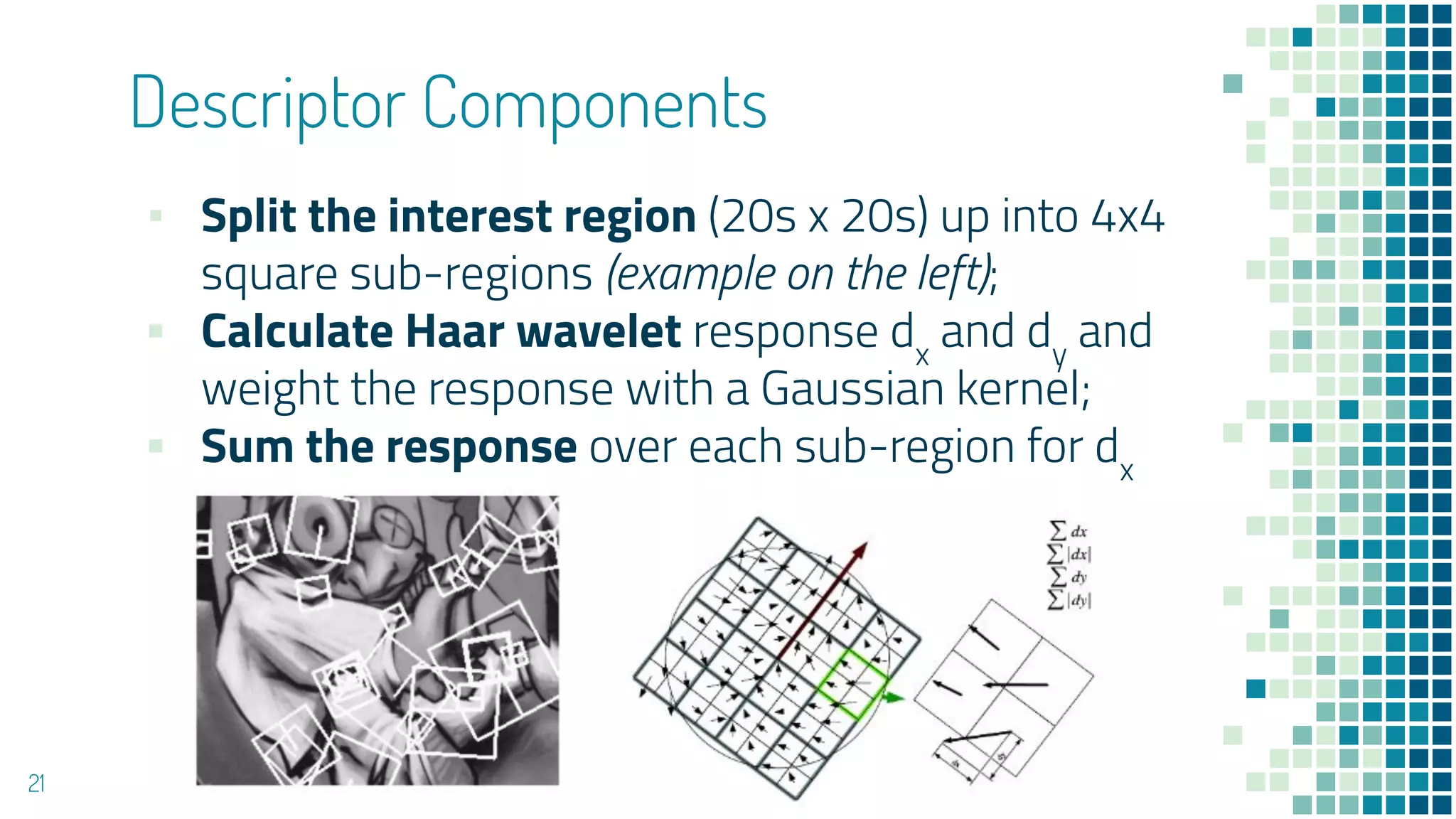
Descriptor Components
▪ Splitthe interest region (20s x 20s) up into 4x4
square sub-regions (example on the left);
▪ Calculate Haar wavelet response dx
and dy
and
weight the response with a Gaussian kernel;
▪ Sum the response over each sub-region for dx
21
22.
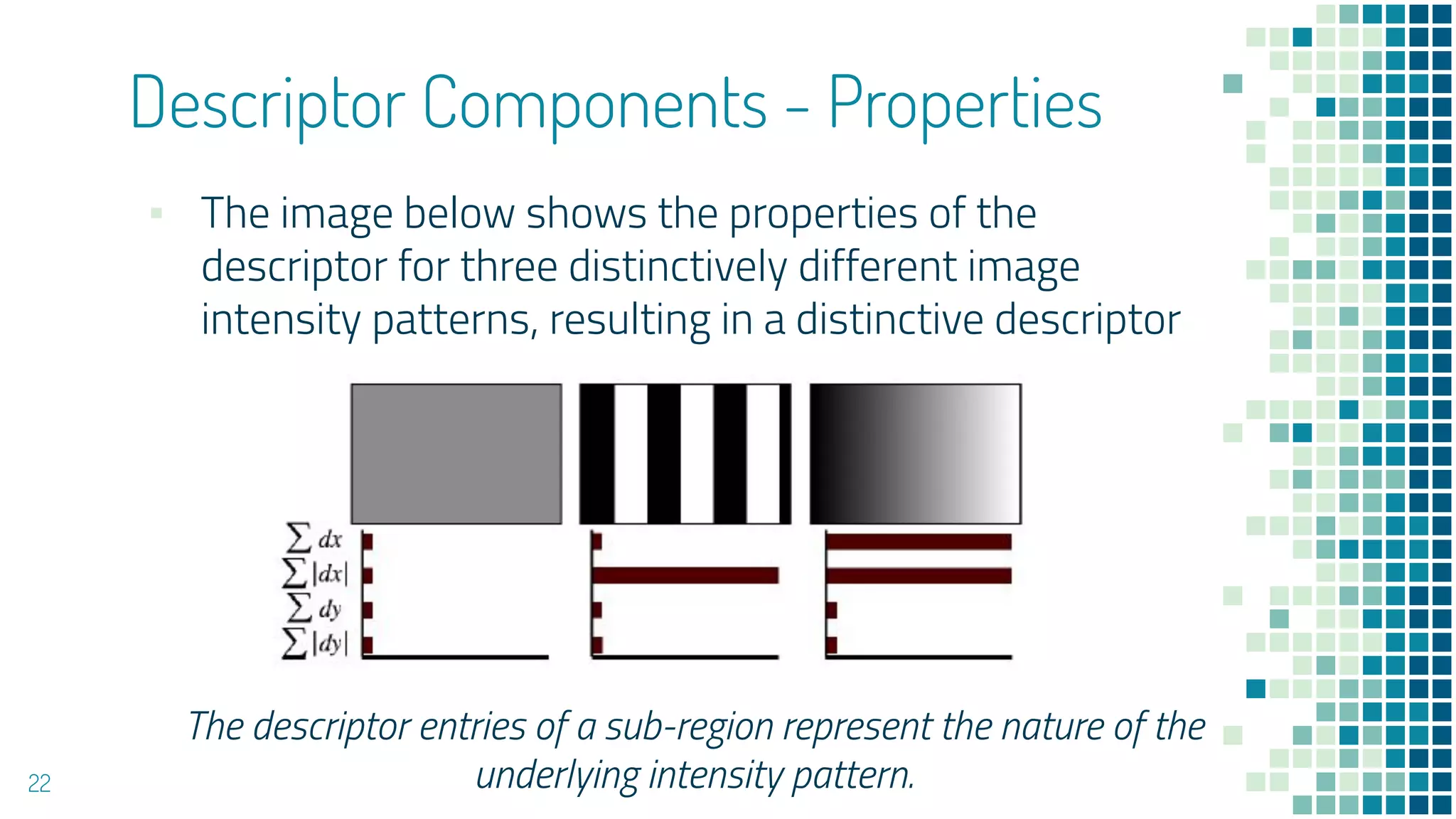
Descriptor Components -Properties
▪ The image below shows the properties of the
descriptor for three distinctively different image
intensity patterns, resulting in a distinctive descriptor
22
The descriptor entries of a sub-region represent the nature of the
underlying intensity pattern.
23.
Matching stage
▪ Forfast indexing during this stage, the sign of the
Laplacian for the underlying interest point is
included;
▪ Features are only compared if they have the same
type of contrast - this minimal information allows
for faster matching and gives a slight increase in
performance
23
Standard Evaluation
▪ Usingimages with real textures and structured scenes.
▪ Two viewpoint changes (Graffiti and Wall), one zoom and
rotation (Boat) and lighting changes (Leuven)
▪ The detectors are evaluated using repeatability score
that indicates how many of the detected interest points
are found in both images, relative to the lowest total
number of interest points found
▪ The descriptors are evaluated using recall-(1-precision)
graphs.
▪ SURF is compared to GLOH, SIFT and PCA-SIFT
25
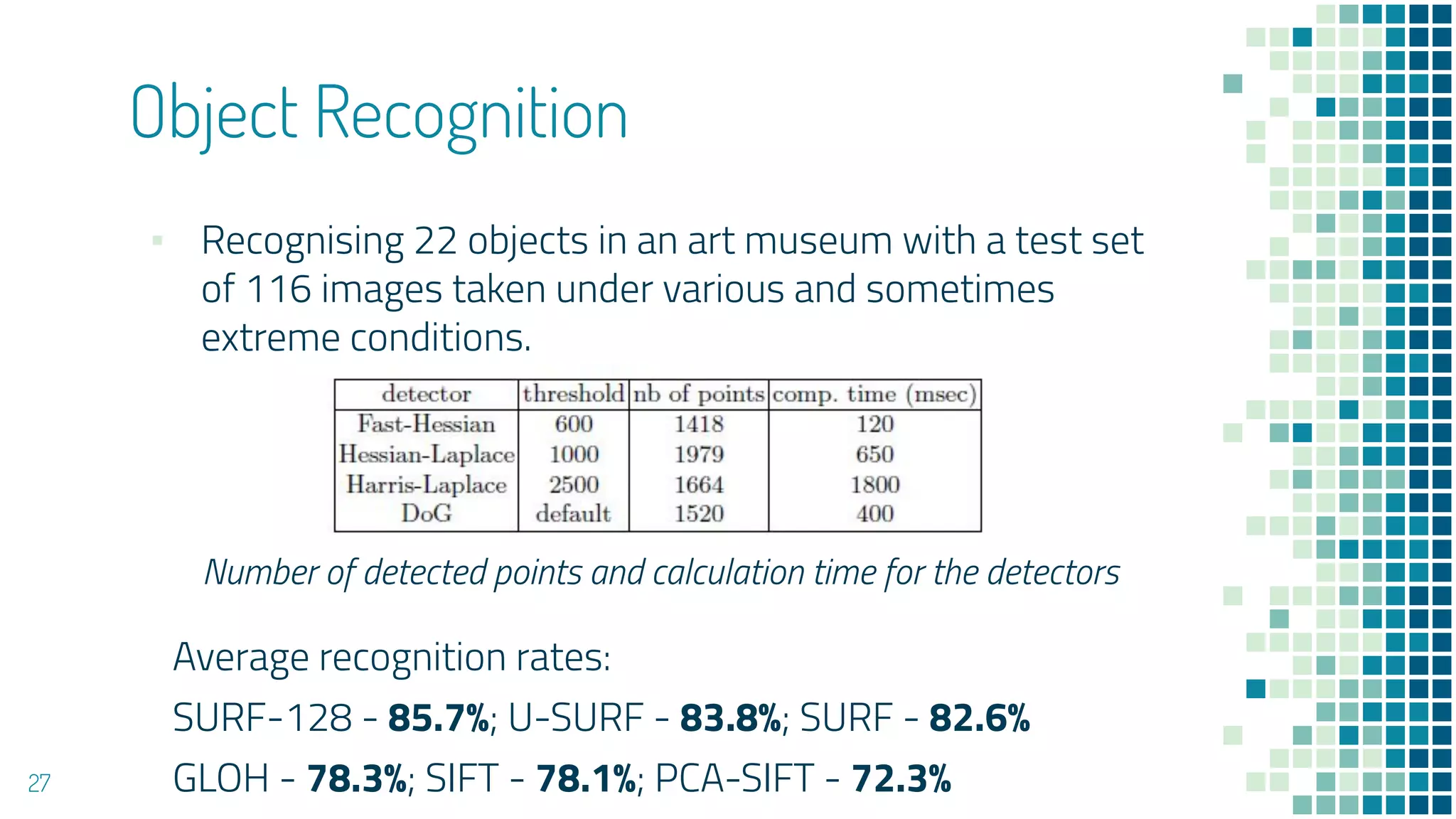
Object Recognition
▪ Recognising22 objects in an art museum with a test set
of 116 images taken under various and sometimes
extreme conditions.
27
Number of detected points and calculation time for the detectors
Average recognition rates:
SURF-128 - 85.7%; U-SURF - 83.8%; SURF - 82.6%
GLOH - 78.3%; SIFT - 78.1%; PCA-SIFT - 72.3%
28.
28
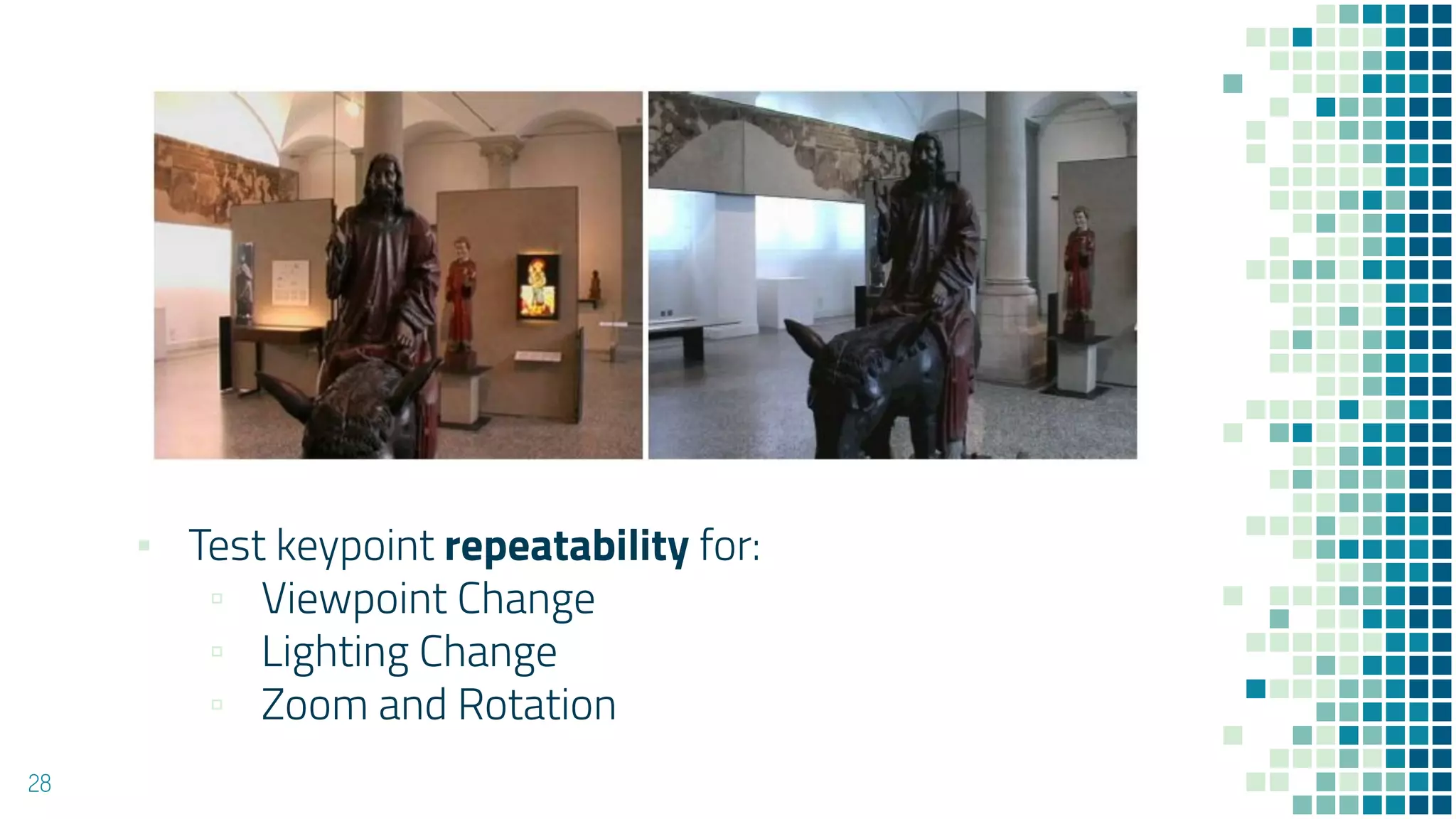
▪ Test keypointrepeatability for:
▫ Viewpoint Change
▫ Lighting Change
▫ Zoom and Rotation
▪ SURF outperformsthe other descriptors for almost all
comparisons.
31
▪ The SURF descriptor outperforms the other descriptors in
a systematic and significant way, with sometimes more
than 10% improvement in recall for the same level of
precision. At the same time, it is fast to compute.
- SURF isa fast and performant interest point
detection-description scheme;
- SURF outperforms the current state-of-the art
both in speed and accuracy;
- SURF descriptor is easily extendable for the
description of affine invariant regions
- Future work will aim at optimising the code for
additional speed up
- A binary of the latest version is available on the
internet
33