Downloaded 57 times









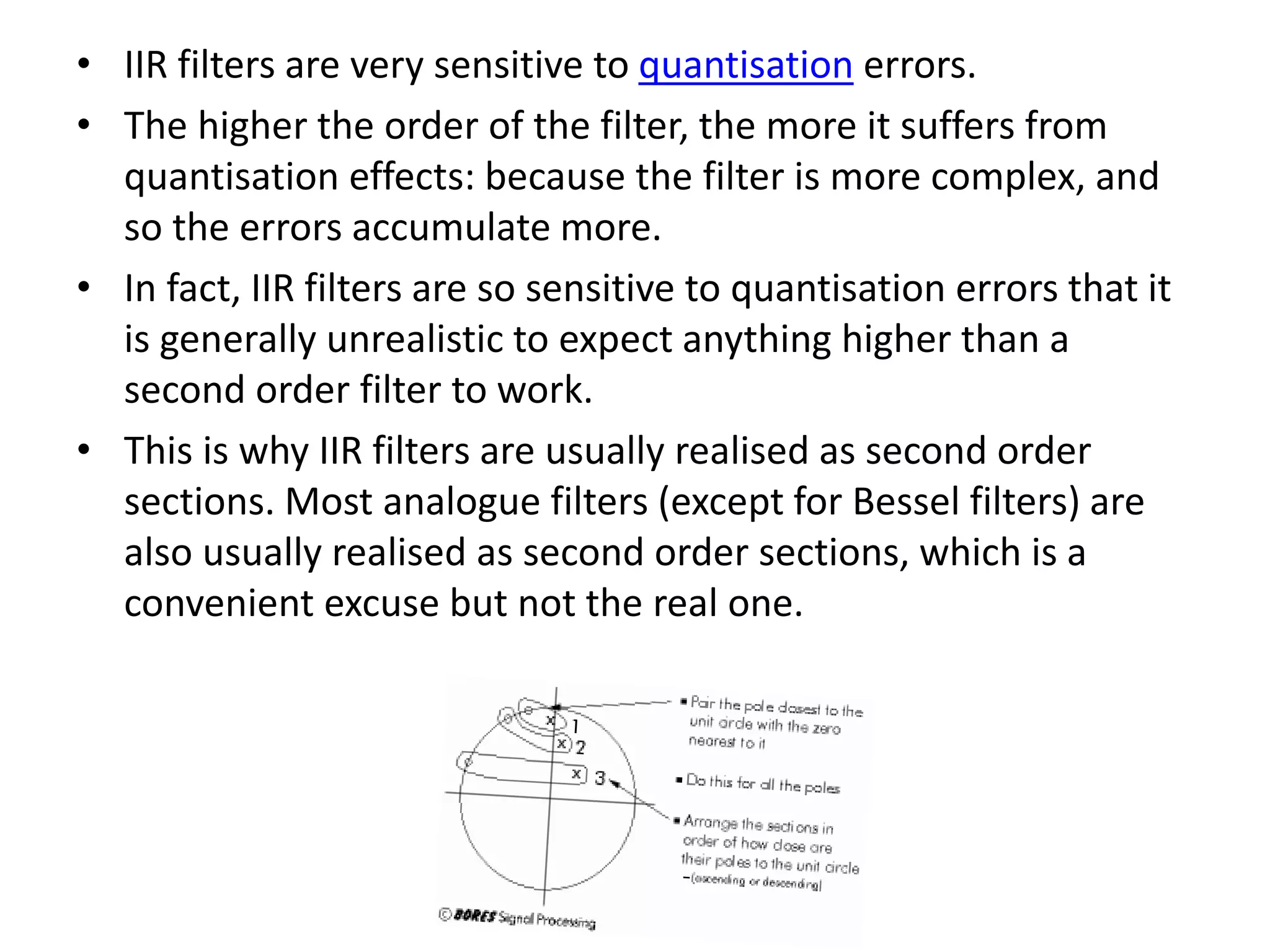

This document discusses infinite impulse response (IIR) filters in digital signal processing. IIR filters involve convolutions with both previous inputs and outputs, resulting in an impulse response that can theoretically be infinite in duration. However, in practice the impulse response dies off to a negligible level. IIR filters can be implemented in direct form I or direct form II structures, with direct form II requiring fewer delay elements. IIR filters are also often implemented as cascades or parallels of second order filter sections to minimize quantization errors and instability issues.