Download as PDF, PPTX



![Considering images and noise as random variables, the
ˆ
Important Equations
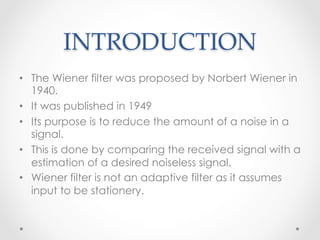
is to find an estimate f of the uncorrupted image f su
mean square error between them is minimized.
• We choose The error measure is given by
W(k,l) to minimize:
e 2 = E { (f − f )2 }
ˆ
Obtained from [1]
where E {i} is the expected value of the argument.
• Where the equation represents the mean square
error.
By assuming that
• The wiener filter can be represented by the
equation: 1. the noise and the image are uncorrelated;
2. one or the other has zero mean;
3. the intensity levels in the estimate are a linear fu
the levels in the degraded image.](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-6-320.jpg)
![Important Equations
• Obtained from [1]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-7-320.jpg)
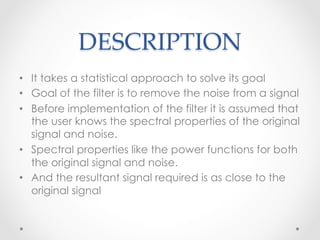
![The Wiener filter does not have the same problem as the invers
filter with zeros in the degradation function, unless the entire
denominator is zero for the same value(s) of u and v .
Important Equations
If the noise is zero, then the Wiener filter reduces to the invers
filter.
• The signal to noise ration can be approximated
using One of the most important measures is the signal-to-noise ratio
the following equation:
approximated using frequency domain quantities such as
M −1 N −1
∑∑ F (u, v ) 2
u =0 v =0
SNR = M −1 N −1
(5.8-3)
∑∑ N (u, v ) 2
u =0 v =0
Obtained from [1]
• Low noise gives high SNR and High noise gives Low
SNR. The value is a good metric used in
characterizing the performance of restoration
algorithm](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-9-320.jpg)
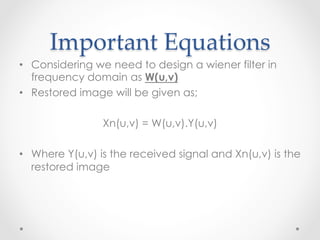
![The mean square error given in statistical form in (5.8-1) can be
Important Equations
approximated also in terms a summation involving the original
and restored images:Image Processing (Fall Term, 2011-12) Page 291
• The MSE in statistical form can be calculated as:
ACS-7205-001 Digital
M −1 N −1
1
The mean square error given in statistical form in (5.8-1) can be
2
MSE =
and restored images:∑ ∑ f (x, y) − fˆ(x, y)
approximated also in terms a summation involving the original
MN x =0 y =0 M −1 N −1
(5.8-4)
1 f (x , y ) − f (x , y ) 2
MSE = ∑ ∑
MN x = 0 y = 0
Obtained from [1]
ˆ
(5.8-4)
• If restored signal isthe restored image asbe signal and the difference
If one considers considered to signal and can define a
If one considers the restored image to be signal and the difference
difference between the thespatial domain noise, we
between this image and restored to be degraded as
original and
signal-to-noise ratio inthe original to be noise, we can define a
between this we can the
the noise, then
image and obtain SNR in spatial domain
as
signal-to-noise ratio in the∑ ∑ domain as
spatial fˆ(x, y)
M −1 N −1
2
x =0 y =0
SNR = M −1 N −1
2 (5.8-5)
∑ M −1 N −1 x, y ) − f (x, y )
∑ f( ˆ
x =0 y =0
ˆ ∑ ∑ f (x, y)
Obtained from ˆ
[1] 2
The closer f and f are, the larger this ratio will be.
x =0 y =0
SNR = 2
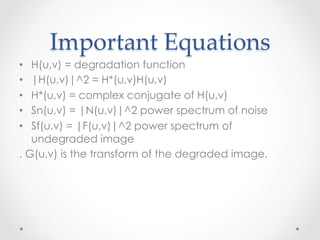
If we are dealing with white noise, the spectrum N (u, v ) is a
M −1 N −1](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-10-320.jpg)
![∑ ∑ f (x, y) − f (x, y)
x =0 y =0
Important Equations
The closer f and fˆ are, the larger this ratio will be.
N (u, v) 2 is a
• But it isare dealing withhard noise, the spectrum power
If we sometimes white to estimate the
spectrumwhich simplifies things considerably.image or the
constant, of either the un-degraded However,
noise., v ) 2
F (u is usually unknown.
• In that case we assume a constant K, that is then
added to allis used frequently when these quantities are not
An approach terms of H|(u,v)|^2
• The new equation in that case becomes:
known or cannot be estimated:
1 H (u, v) 2
ˆ
F (u, v) = G(u, v)
H (u, v) H (u, v) + K
2 (5.8-6)
Obtained from [1]
where K is a specified constant that is added to all terms of
H (u, v) 2 .](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-11-320.jpg)
![Working Example 1
ACS-7205-001 Digital Image Processing (Fall Term, 2011-12)
7205-001 Digital Image Processing (Fall Term, 2011-12)
Page 293
Page 293
ample 5.13:apply Further comparisons of Wienerof images 293
• We 5.13: the filter to the following set filtering
Example Further comparisons of Wiener filtering
205-001 Digital Image Processing (Fall Term, 2011-12) Page
ACS-7205-001 Digital Image Processing (Fall Term, 2011-12) Page 2
mple 5.13: Further comparisons of Wiener filtering
Example 5.13: Further comparisons of Wiener filtering
1 obtained from [1] 2 Obtained from [1]
• We reduce the noise variance (noise power):
3 obtained from[1] 4 obtained from [1]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-12-320.jpg)
![Working Example 1
• We decrease the noise variance even further:
5 obtained from [1] 6 obtained from [1]
• As we can see A wiener filter does a very good job
at deblurring of an image and reducing the noise.](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-13-320.jpg)
![Example 2
• The problem is to estimate the power spectrum of
noise and even more difficult is to estimate the
power spectrum of the image.
• We know that most of the images have similar
power spectrum.
• We take two images and calculate their individual
power spectrum
• The images derived are obtained from [2]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-14-320.jpg)
![Example 2
Obtained from [2]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-15-320.jpg)
![Example 2
• We calculate the power spectrum of each image:
Obtained from [2]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-16-320.jpg)
![Example 2
• If we restore the cameraman image using its own
power spectrum, the image will look like this:
Obtained from [2]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-17-320.jpg)
![Example 2
• But we use the power spectrum obtained from the
house image, the restored image will look like this:
Obtained from [2]](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-18-320.jpg)
![References
• [1] R. Gonzalez and W. RE, Digital Image
Processing, Third Edit. Pearson Prentice Hall, 2008,
pp. 352–357.
• [2] S. Eddins, “Matlab Central Steve on Image
Processing.” [Online]. Available: http://
blogs.mathworks.com/steve/2007/11/02/image-
deblurring-wiener-filter/. [Accessed: 25-Aug-2012].](https://image.slidesharecdn.com/ams1-121108221245-phpapp01/85/Wiener-Filter-22-320.jpg)

The Wiener filter is a signal processing filter that reduces noise in a signal. It was proposed by Norbert Wiener in 1940 and published in 1949. The Wiener filter takes a statistical approach to minimize the mean square error between an original noiseless signal and the estimated signal by assuming knowledge of the spectral properties of the original signal and noise. It is commonly used for noise reduction and image deblurring. The Wiener filter implementation is available in Matlab and Python and its performance depends on the noise parameters used.