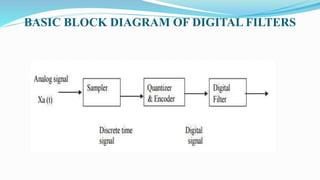
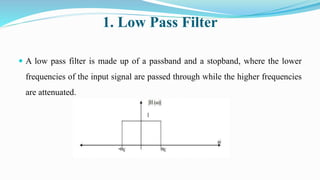
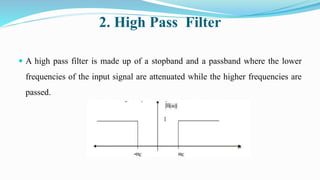
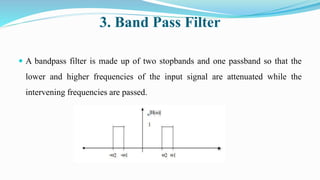
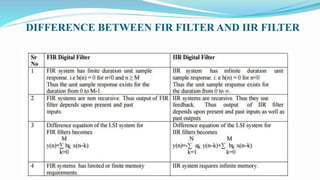
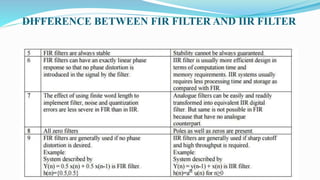
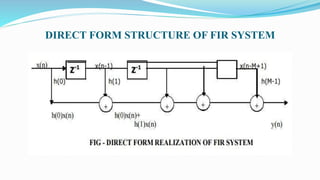
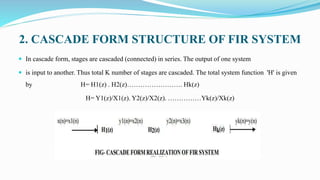
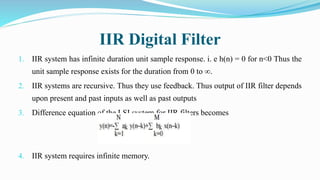
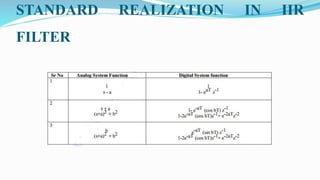
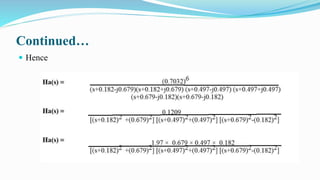
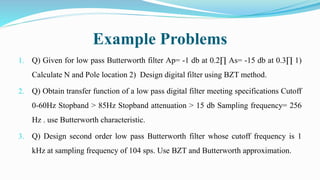
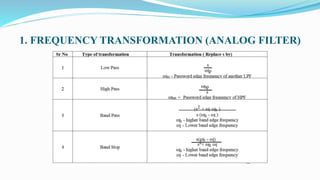
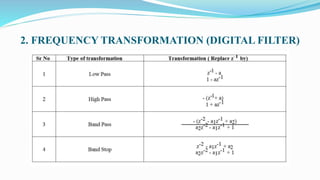
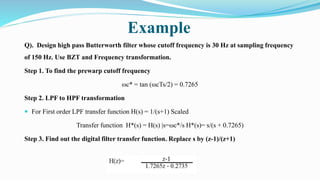
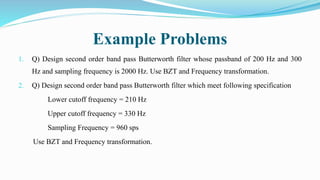
This document discusses infinite impulse response (IIR) filters. It begins by introducing digital filters and their basic block diagram. There are two main types of digital filters: finite impulse response (FIR) filters and IIR filters. FIR filters have a finite duration impulse response, while IIR filters have an infinite duration impulse response and are recursive. The document then discusses different filter types (low pass, high pass, etc.), ideal filter characteristics, and common structures for implementing FIR and IIR filters like direct form and cascade form structures.