- There is a quiz tomorrow on sections 3.1 and 3.2 of the course material. Calculators will not be allowed and determinants must be calculated using the methods learned.
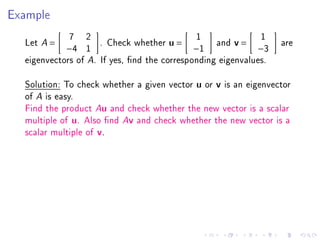
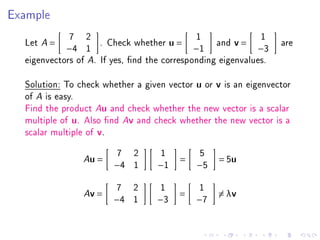
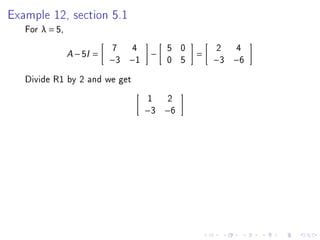
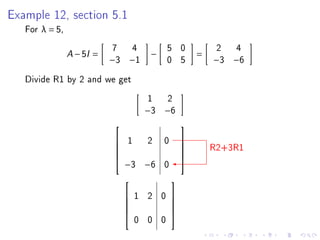
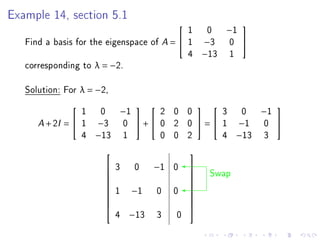
- Eigenvalues and eigenvectors are related to the linear transformation of a matrix A acting on a vector x. They give a better understanding of the transformation.
- The 1940 collapse of the Tacoma Narrows Bridge is explained by oscillations caused by the wind frequency matching the bridge's natural frequency, which is the eigenvalue of smallest magnitude based on a mathematical model of the bridge. Eigenvalues are important for engineering structure design.