Downloaded 34 times



![Similarly, for e-value of 4, the eigenfunction appears
1
to be e2 = − 2 .
6. Faddeev-Leverrier Method to get characteristic
polynomial.
Define a sequence of matrices P = A, p1 = trace( P )
1 1
1
P2 = A[ P − p1I ] , p2 = trace( P2 )
1
2
1
P3 = A[ P2 − p2 I ] , p3 = trace( P3 )
3
…
…
1
Pn = A[ Pn −1 − pn −1I ] , p n = trace( Pn )
n
Then the characteristic polynomial P( λ ) is
[
P( λ ) = ( −1 )n λn − p1λn −1 − p2 λn − 2 − ... − pn ]
12 6 − 6
6 16 2
e.g. A=
− 6 2
16
Define P = A, p1 = trace( A ) = 12 + 16 + 16 = 44
1
P2 = A( P − p1I ) =
1
12 6 − 6− 32 6 −6
6 16 2 6 − 28 2
− 6 2
16 − 6
2 − 28
− 312 −108 108
= −108 − 408 − 60 , p 2 = −564
108
− 60 − 408
](https://image.slidesharecdn.com/eigenvalues-121120022311-phpapp02/85/Eigenvalues-4-320.jpg)
![And one proceeds this way to get p3 = 1728
The CA polynomial = ( −1 )3 [λ3 − 44λ2 + 564λ −1728]
The eigenvalues are next found solving
[λ3 − 44λ2 + 564λ −1728] = 0
7. More facts about eigenvalues.
Assume Ax = λ x . Therefore, λ is the eigenvalue of
A with eigenvector x .
a. A−1 has the same eigenvector as A and the
corresponding eigenvalue is λ−1 .
b. An has the same eigenvector as A with the
eigenvalue λn .
c. ( A + µI ) has the same eigenvector as A with the
eigenvalue ( λ + µ ) .
d. If A is symmetric, all its eigenvalues are real.
e. If P is an invertible matrix then P −1 AP has the
same eigenvalues as A .
Proof of e.](https://image.slidesharecdn.com/eigenvalues-121120022311-phpapp02/85/Eigenvalues-5-320.jpg)
![Suppose, the eigenfunction of P −1 AP is y with
eigenvalue k .
Then,
P − APy = ky
1
⇐⇒ APy = Pky = kPy
Therefore, Py = x and k must be equal to λ. Therefore
the eigenvalues of A and P −1 AP are identical and the
eigenvector of one is a linear mapping of the other
one.
If the eigenvalues of A , λ1 ,λ2 ,...,λn are all distinct
then there exists a similarity transformation such that
λ1 0 0 .. 0
0 λ 0 .. 0
2
−1
P AP = D = 0 0 λ3 .. 0
.. .. .. .. 0
0 0 0 .. λn
Let the eigenvectors of A be x ( 1 ) , x ( 2 ) ,..., x ( i ) ,...x ( n )
such that we have Ax( i ) = λi x( i )
Then the matrix P = [ x( 1 ) , x( 2 ) ,..., x( n ) ]
Then AP = [ Ax( 1 ) , Ax( 2 ) ,..., Ax( n ) ]
[
= λ1 x( 1 ) ,λ2 x( 2 ) ,..., λn x( n ) ]
[ ][
= x ( 1 ) , x ( 2 ) ,..., x ( n ) λ1e( 1 ) ,λ 2 e( 2 ) ,..., λn e( n ) ]
= PD
Therefore, P −1 AP = D
Also, note the following. If A is symmetric, then](https://image.slidesharecdn.com/eigenvalues-121120022311-phpapp02/85/Eigenvalues-6-320.jpg)
![. So, we can normalize each
( x ( i ) )t x ( j)
= 0 , ∀i ≠ j
(i )
x (i)
eigenvector and obtain u = x so that the (i )
matrix Q = [u ( 1 ) ,u ( 2 ) ,...,u ( n ) ] would be an orthogonal matrix.
i.e. Q AQ = Dt
Matrix-norm.
Computationally, the l 2 -norm of a matrix is
determined as
l 2 -norm of [
A =|| A ||2 = ρ( At A ) ]1 / 2
1 1 0
e.g. A = 1 2 1
−1
1 2
1 1 −1 1 1 0 3 2 −1
Then A A = 1
t
2 1 1 2 1 = 2 6 4
0
1 2 −1
1 2 −1
4 5
The eigenvalues are:
λ1 = 0, λ2 = 7 + 7 , λ3 = 7 − 7
Therefore, A2 = ρ( At A ) = 7 + 7 ≈ 3.106
A ∞ = max ∑ aij
The l∞norm is defined as 1≤i ≤n j
1 1 0
e.g. A =1 2 1
−1
1 − 4
](https://image.slidesharecdn.com/eigenvalues-121120022311-phpapp02/85/Eigenvalues-7-320.jpg)



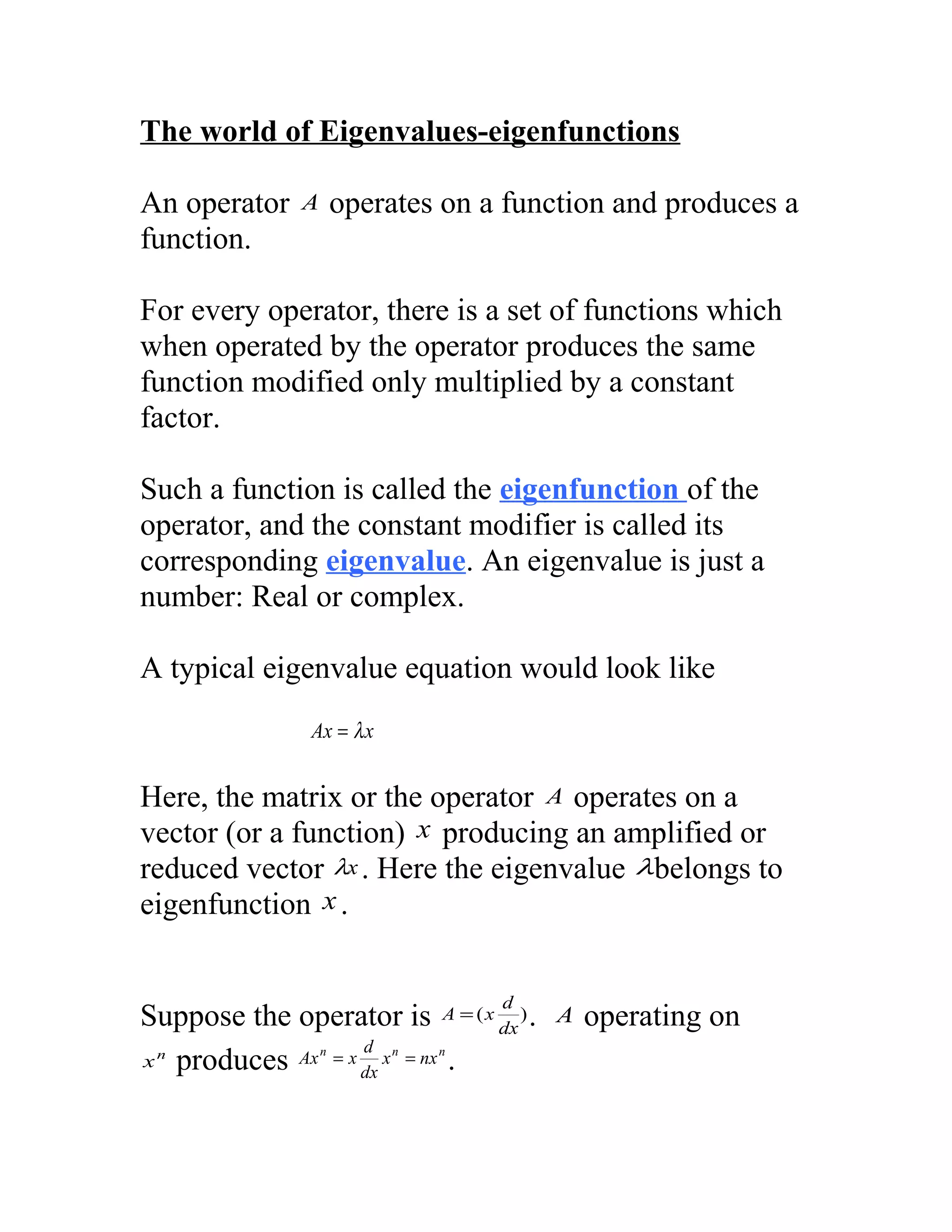
Eigenvalues and eigenfunctions are key concepts in linear algebra. An eigenfunction is a function that when operated on by a linear operator produces a constant multiplied version of itself. The constant is the corresponding eigenvalue. Eigenvalues are the solutions to the characteristic polynomial of the linear operator. Eigenfunctions are not unique as any constant multiple of an eigenfunction is also an eigenfunction with the same eigenvalue. The spectrum of an operator is the set of all its eigenvalues.