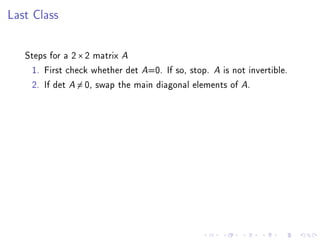
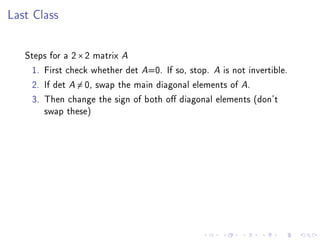
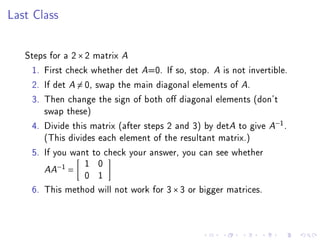
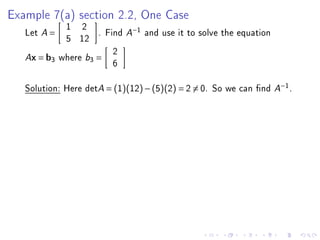
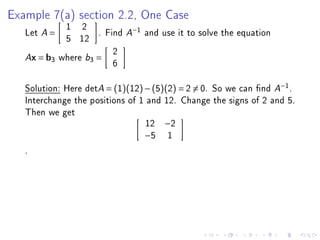
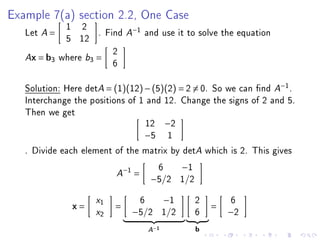
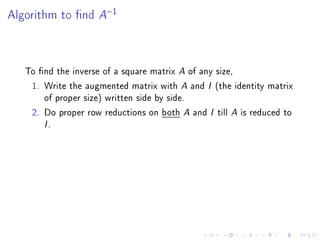
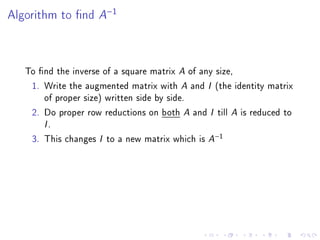
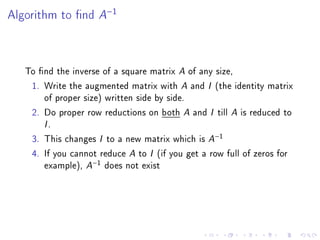
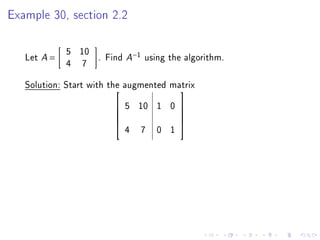
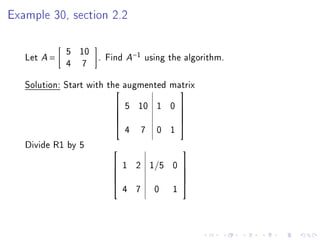
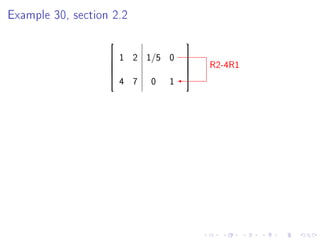
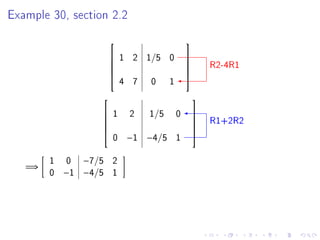
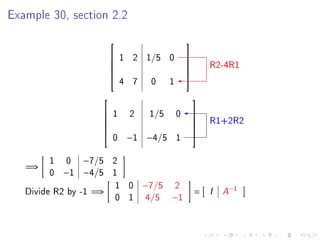
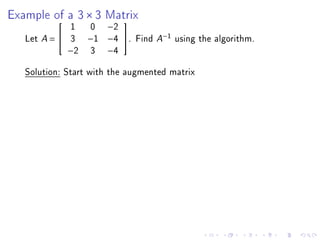
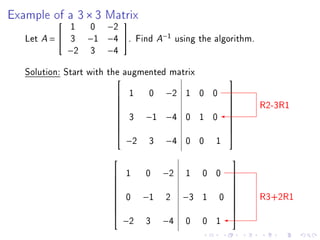
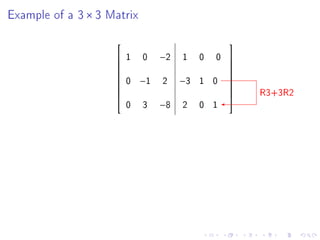
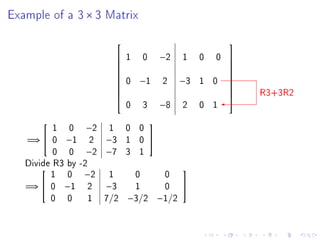
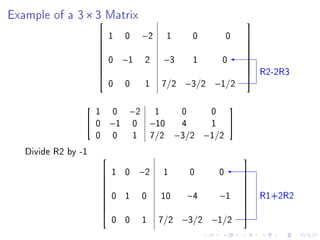
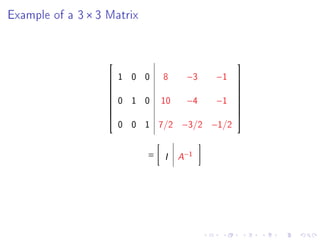
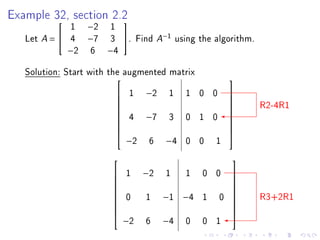
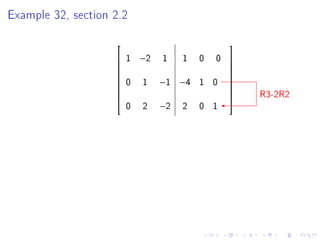
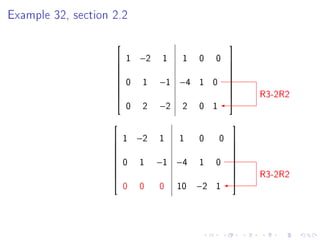
Quiz 2 will be held on January 27 covering sections 1.4, 1.5, 1.7, and 1.8. Test 1 is scheduled for February 1. The document then provides steps to find the inverse of a 2x2 matrix, discusses invertibility if the determinant is 0, and gives an example of finding the inverse of a 3x3 matrix using row reduction of the augmented matrix.