Download as PDF, PPTX
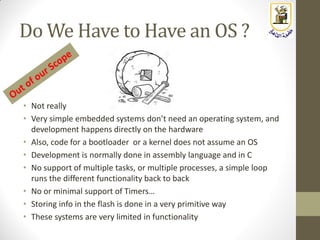
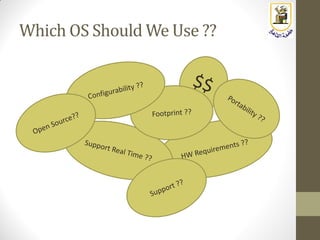


The document discusses the considerations for selecting an operating system (OS) for embedded systems, highlighting that simple systems may not require an OS at all. It outlines various factors such as cost models, hardware requirements, portability, footprint, real-time support, and support availability that influence OS choice. Additionally, it differentiates between commercial and free OS options, as well as proprietary and open-source systems.















































![Embedded Os [Linux & Co.]](https://cdn.slidesharecdn.com/ss_thumbnails/embedded-os-linux-co-1210967191310913-8-thumbnail.jpg?width=640&height=640&fit=bounds)
































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)









