Download as PDF, PPTX
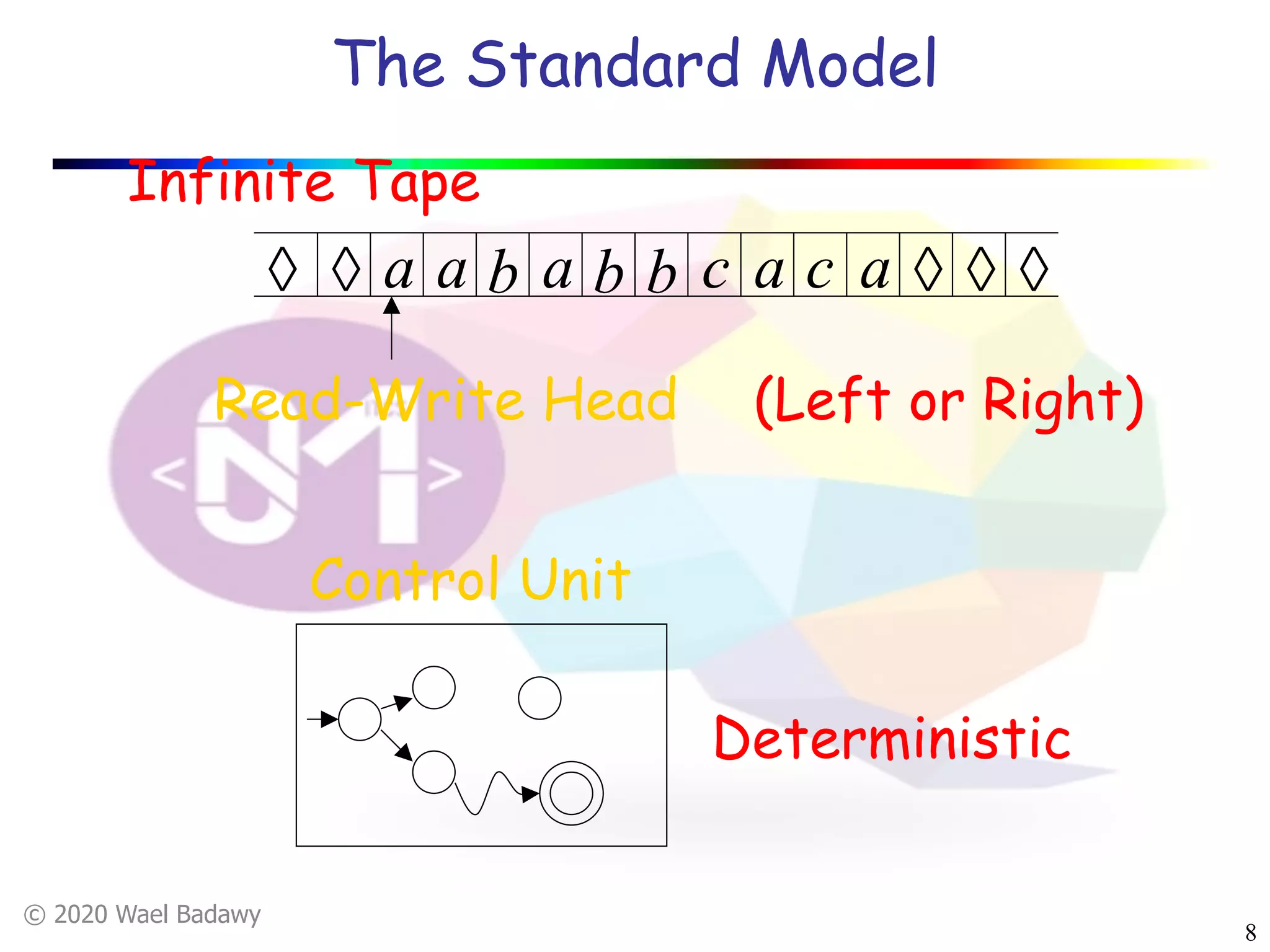
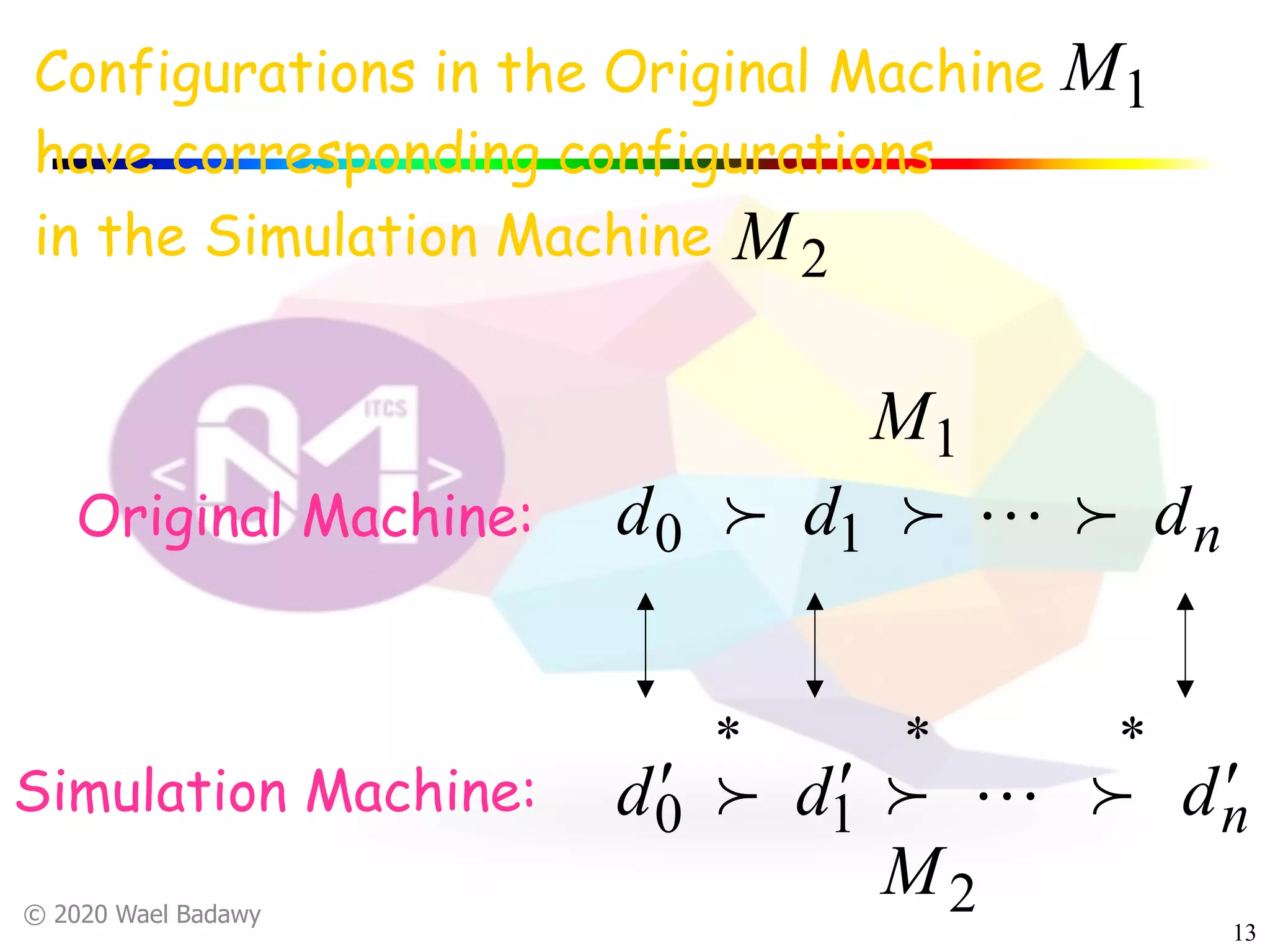
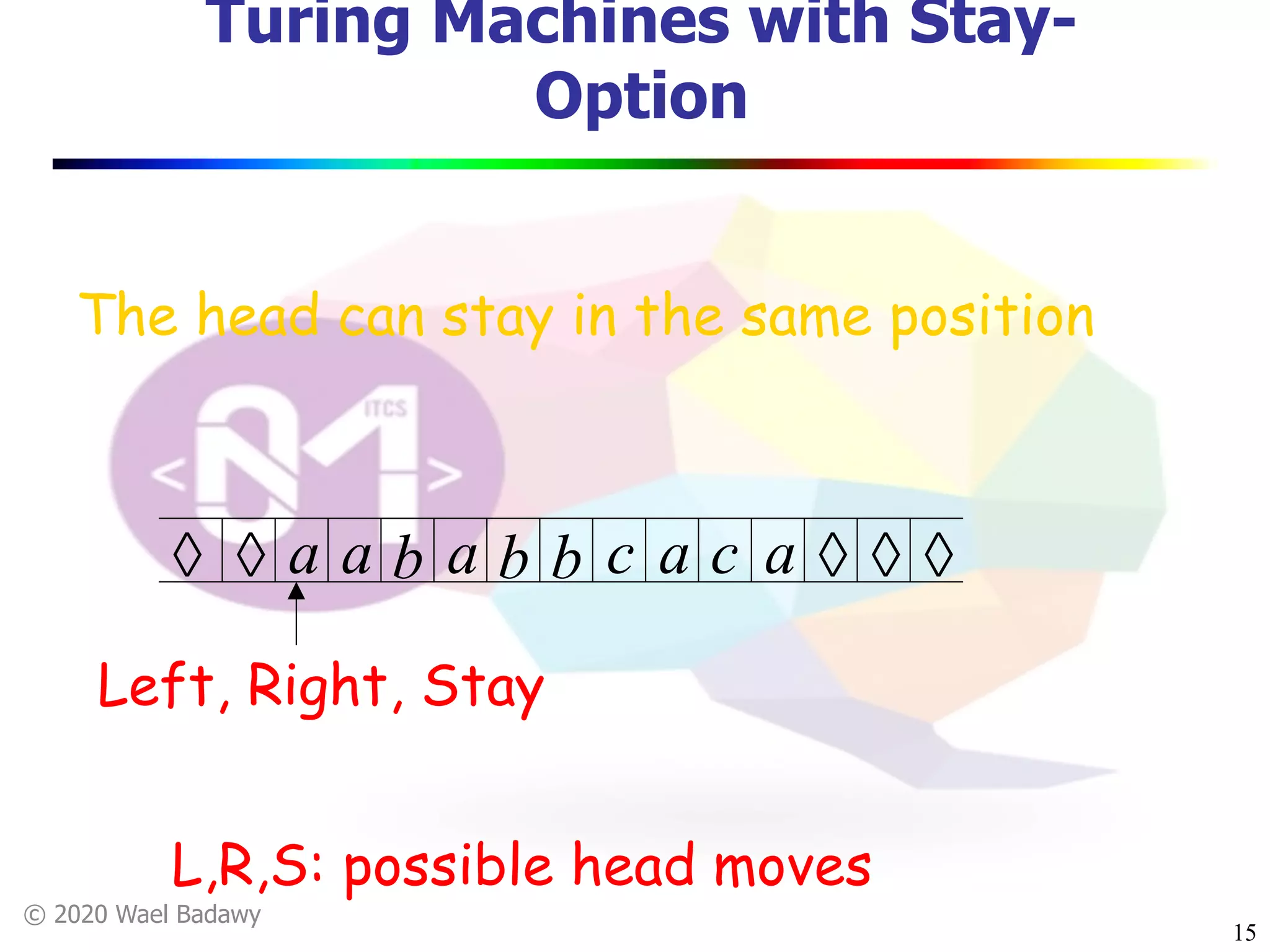
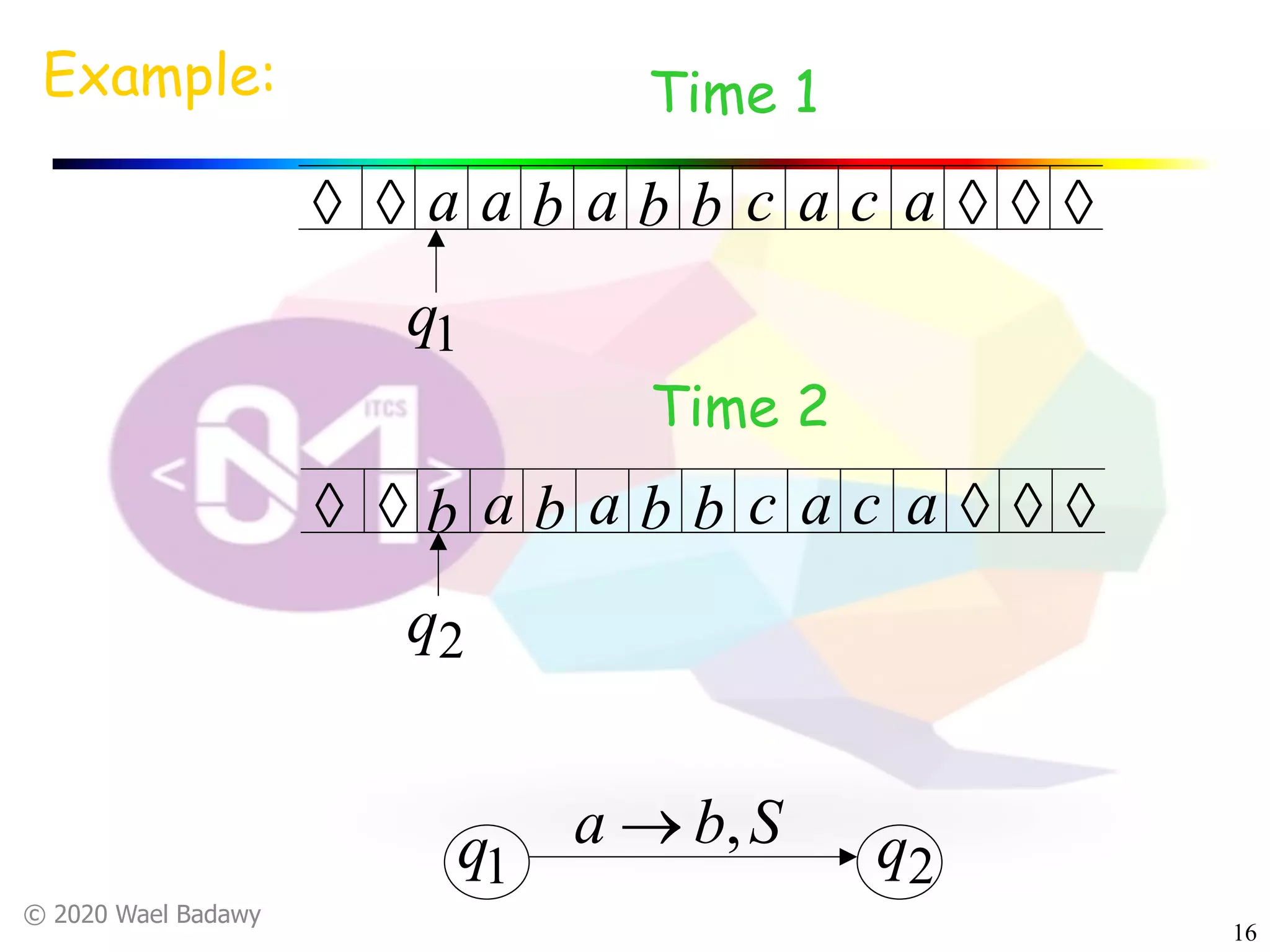
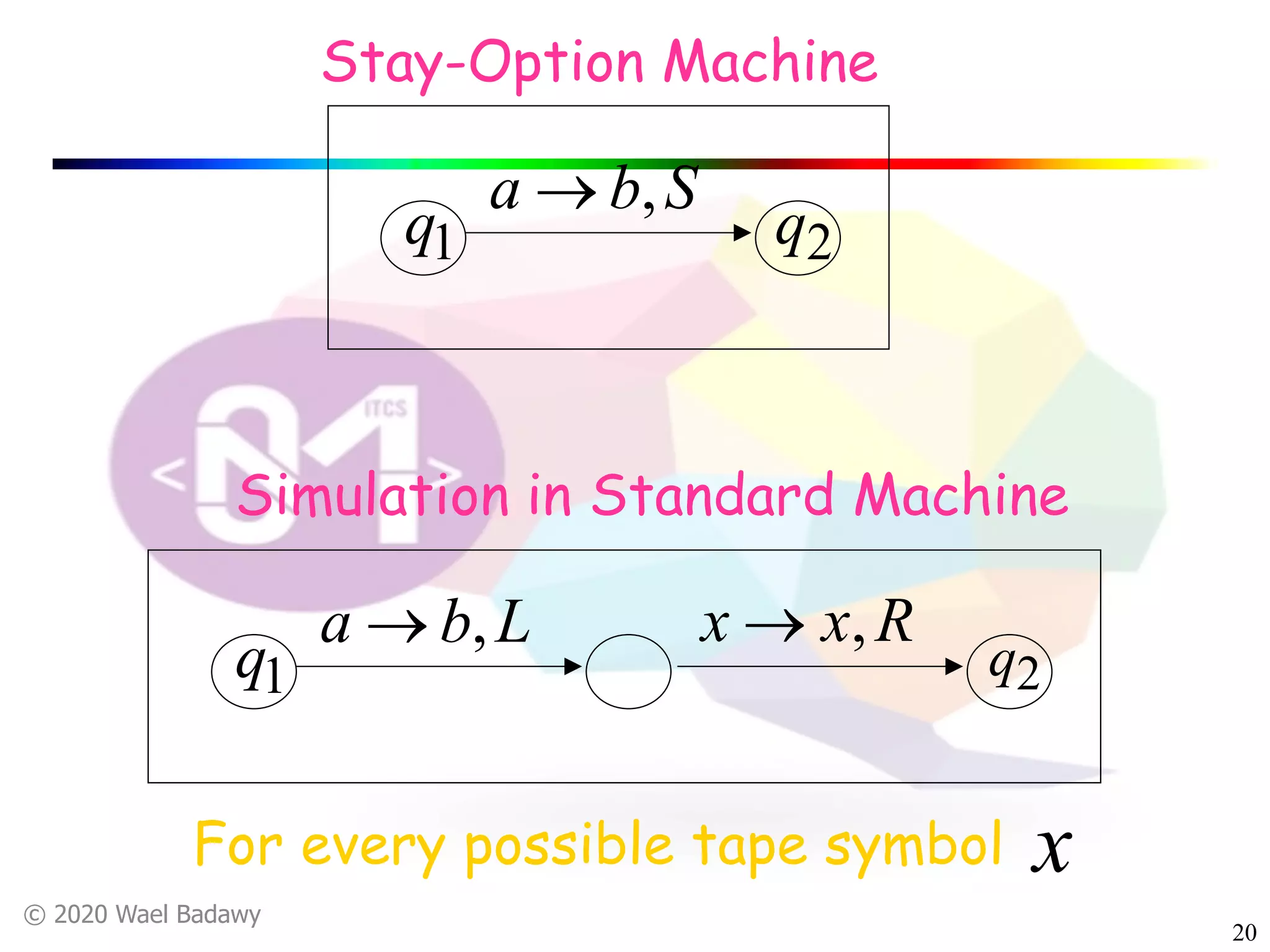
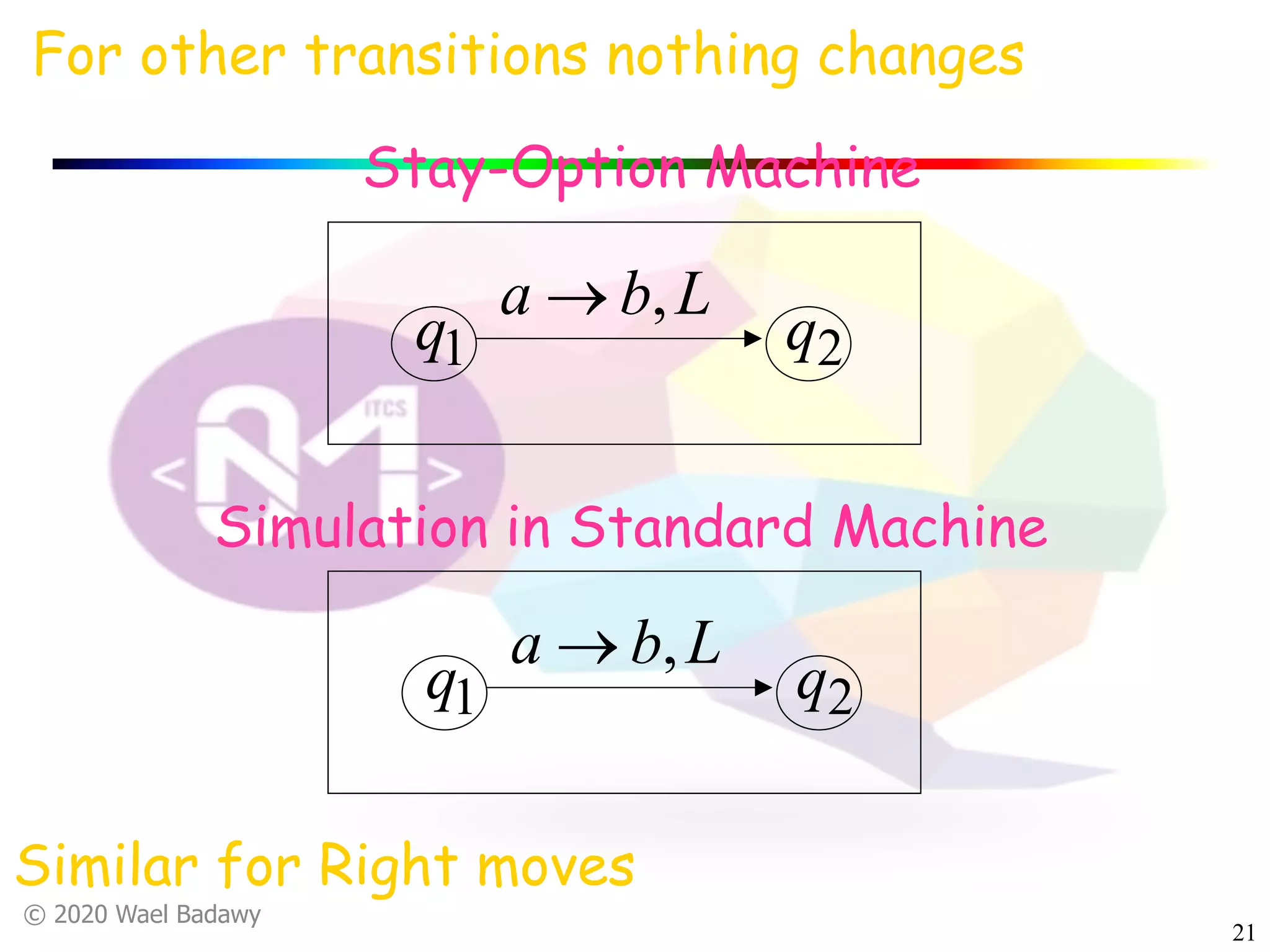
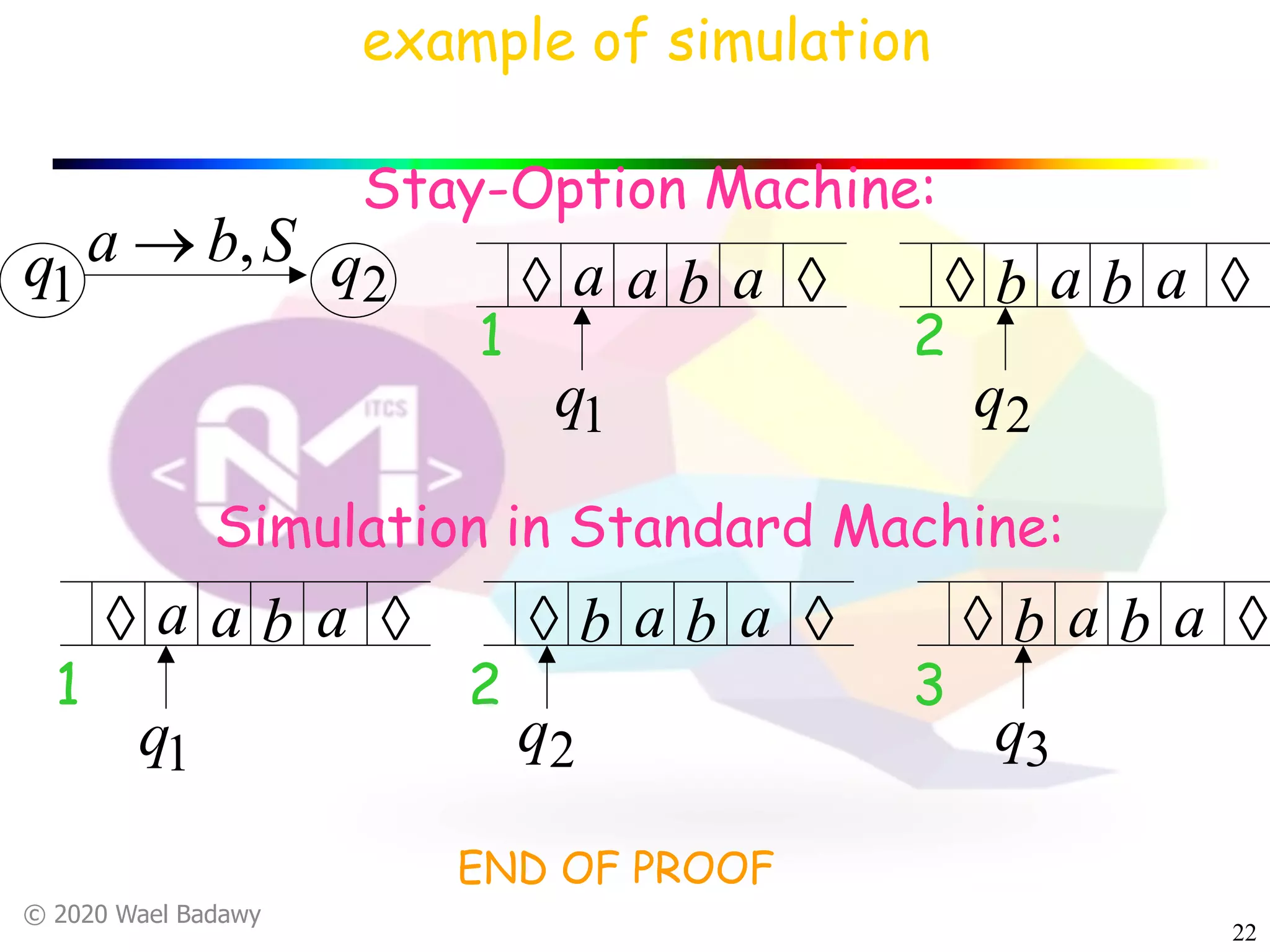
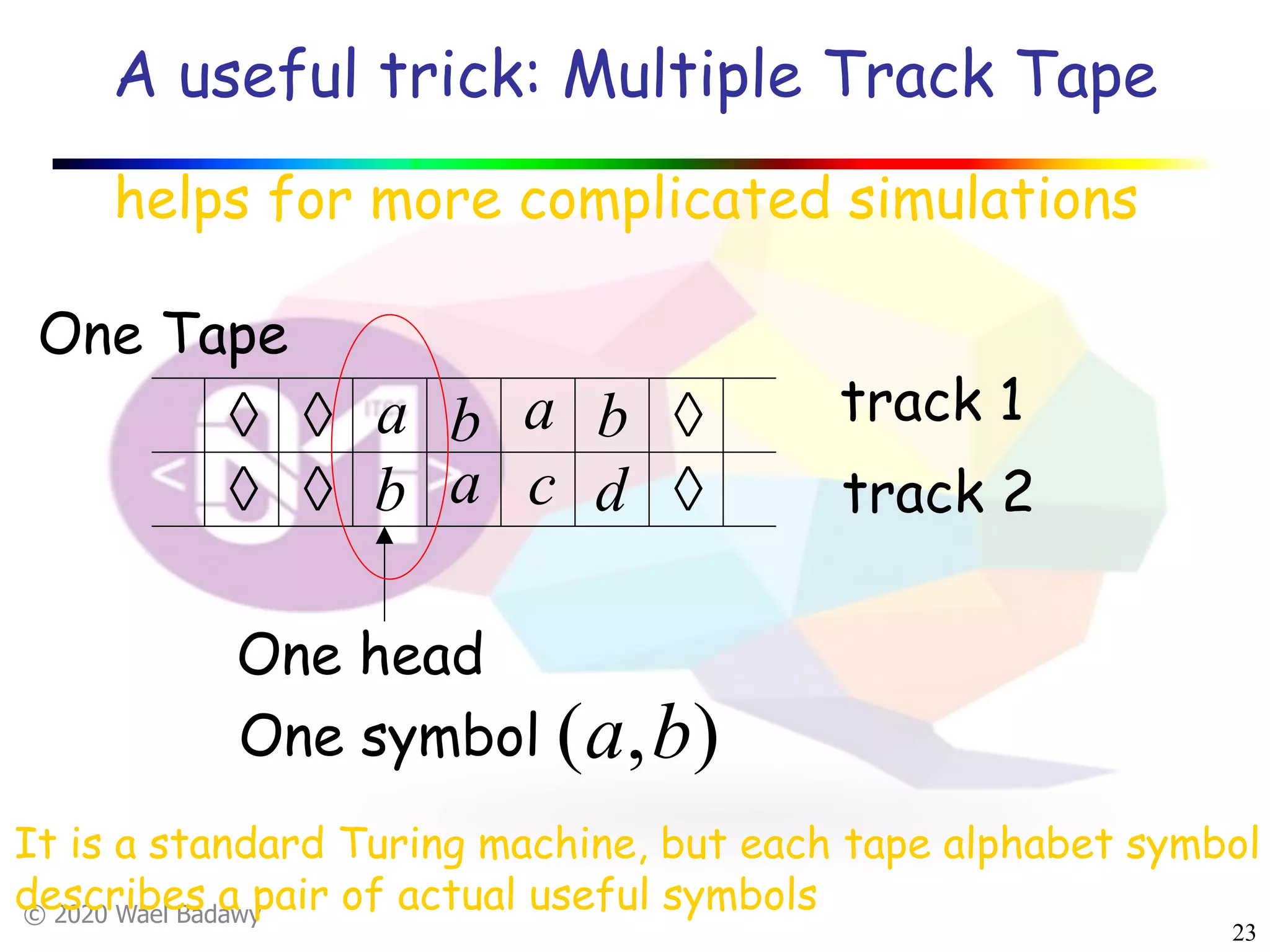
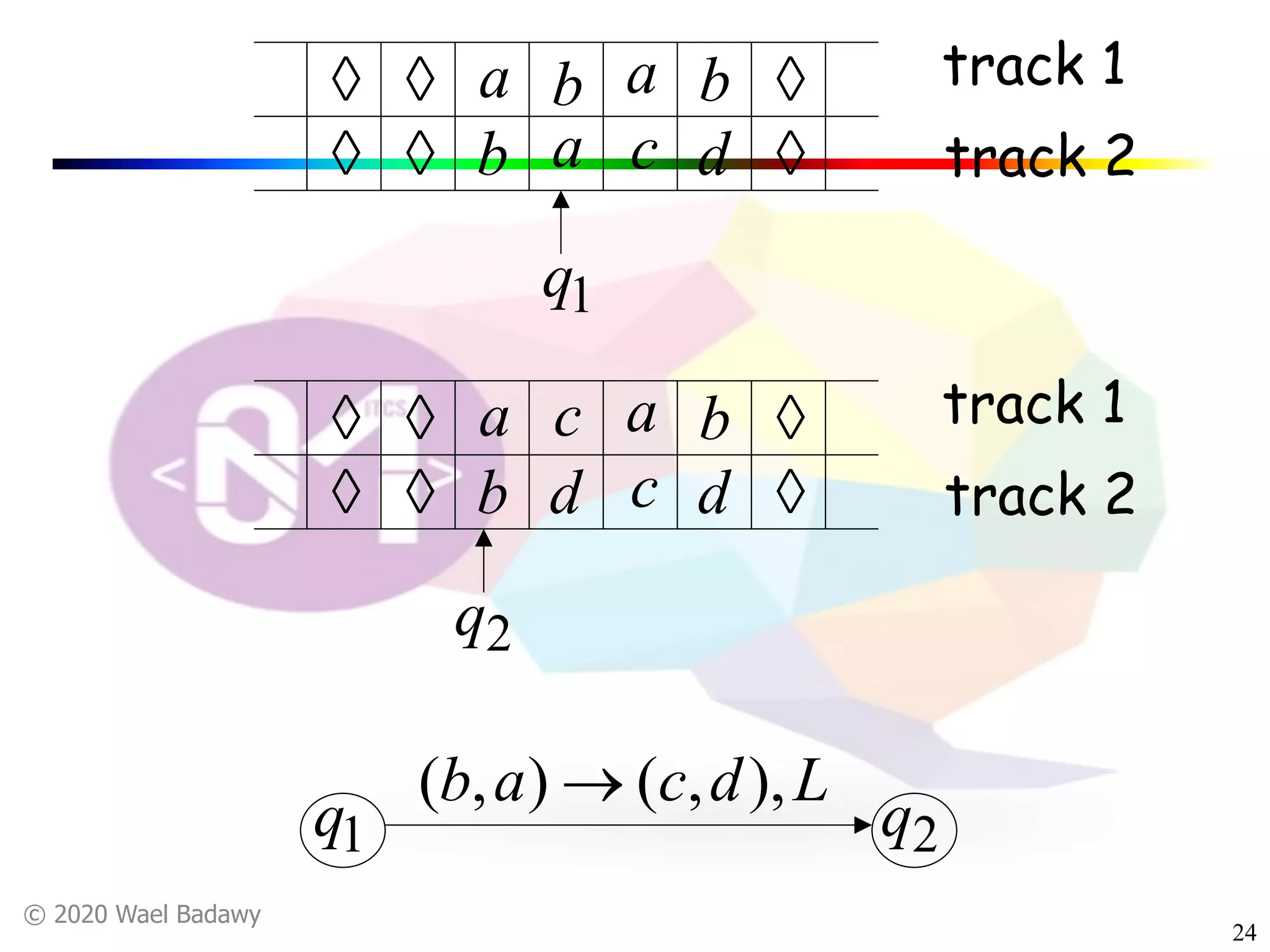
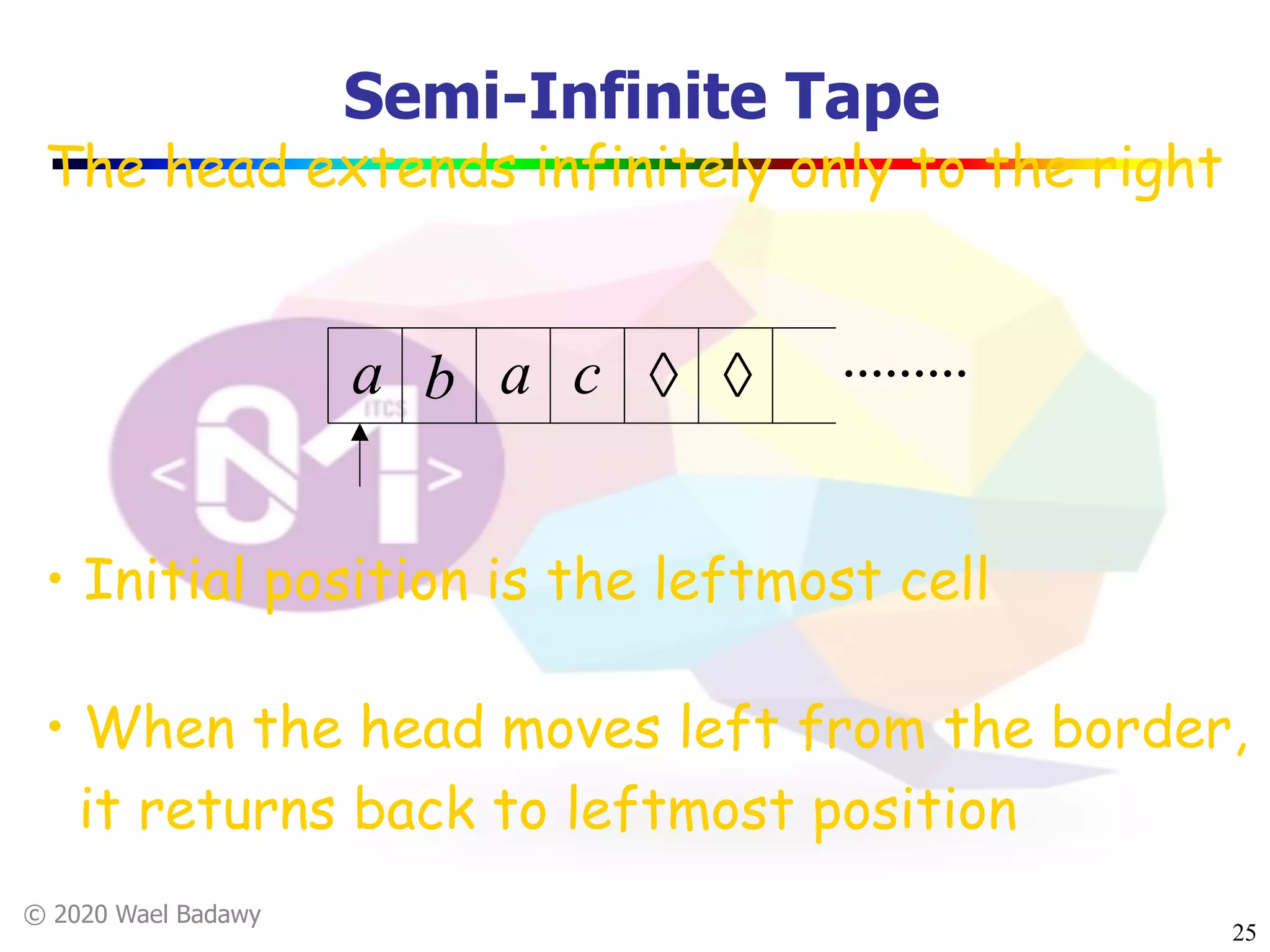
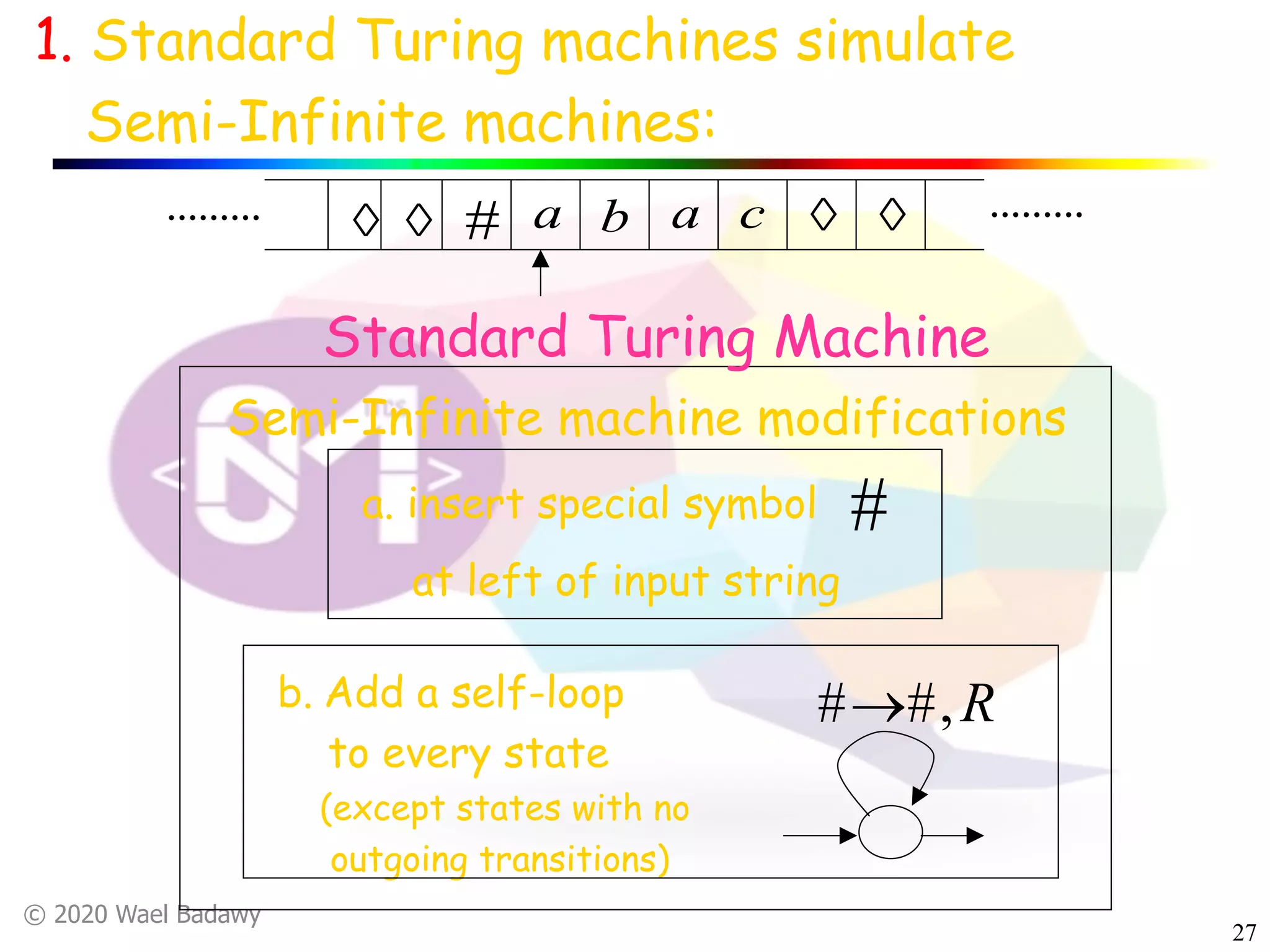
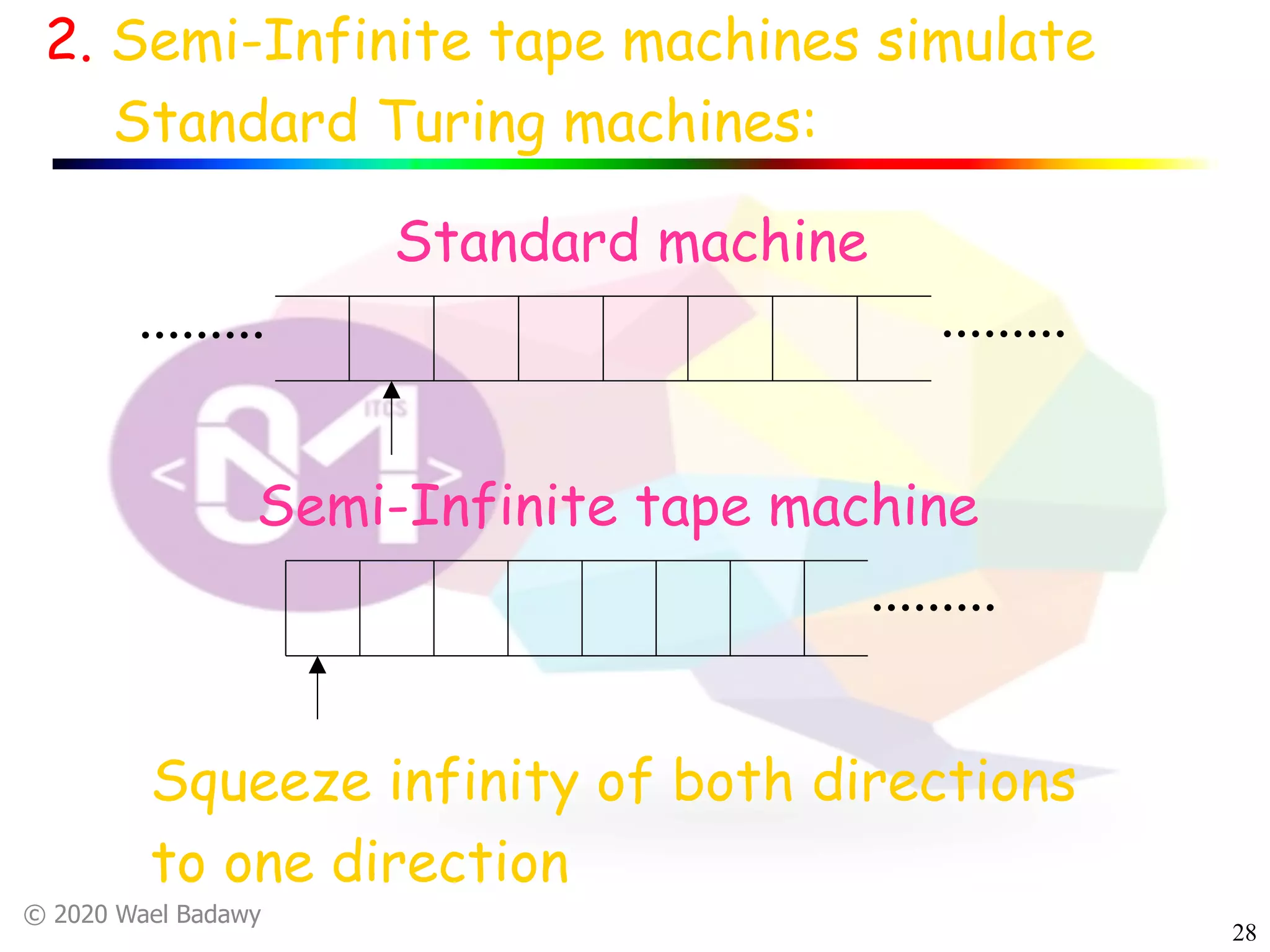
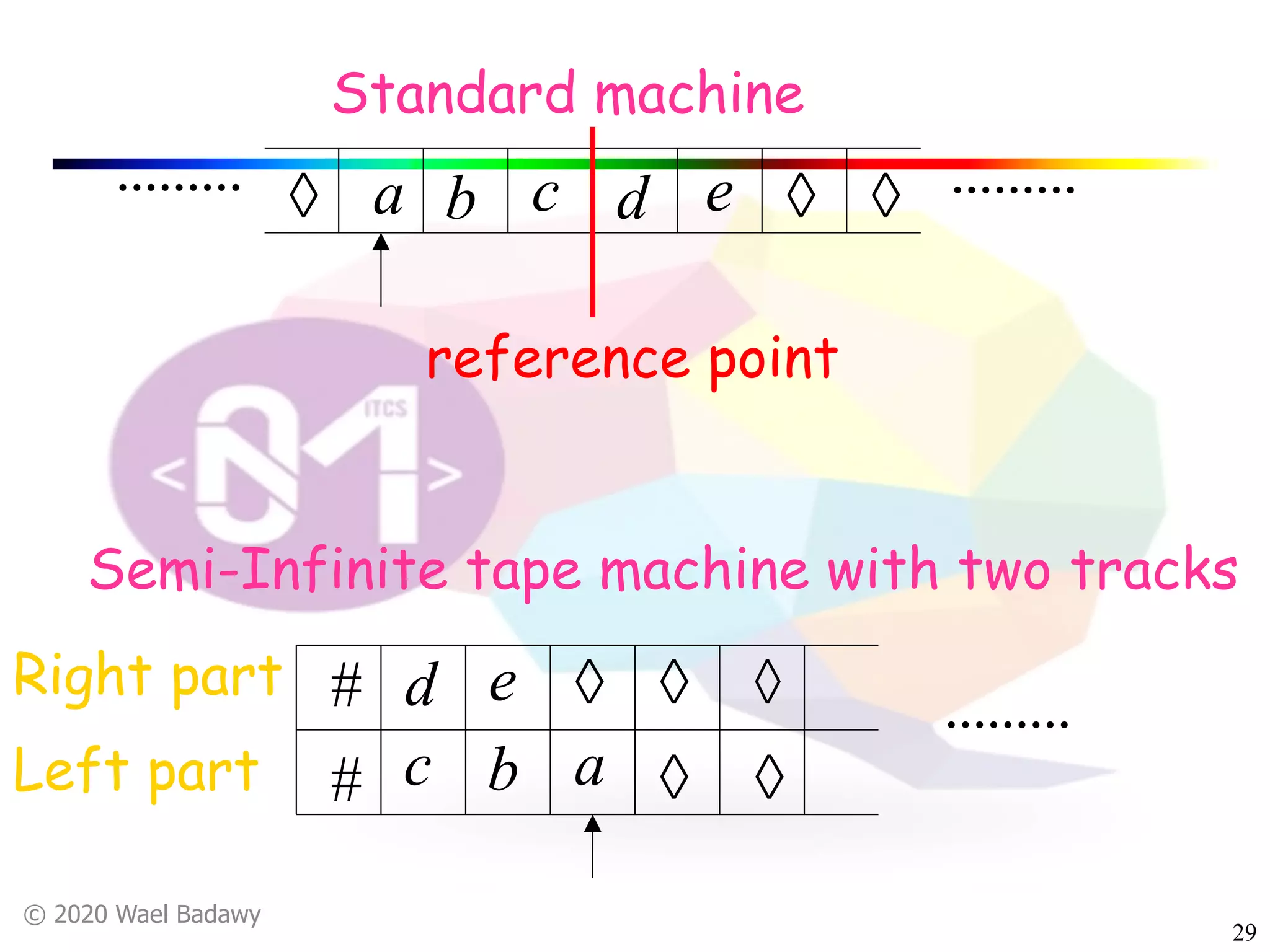
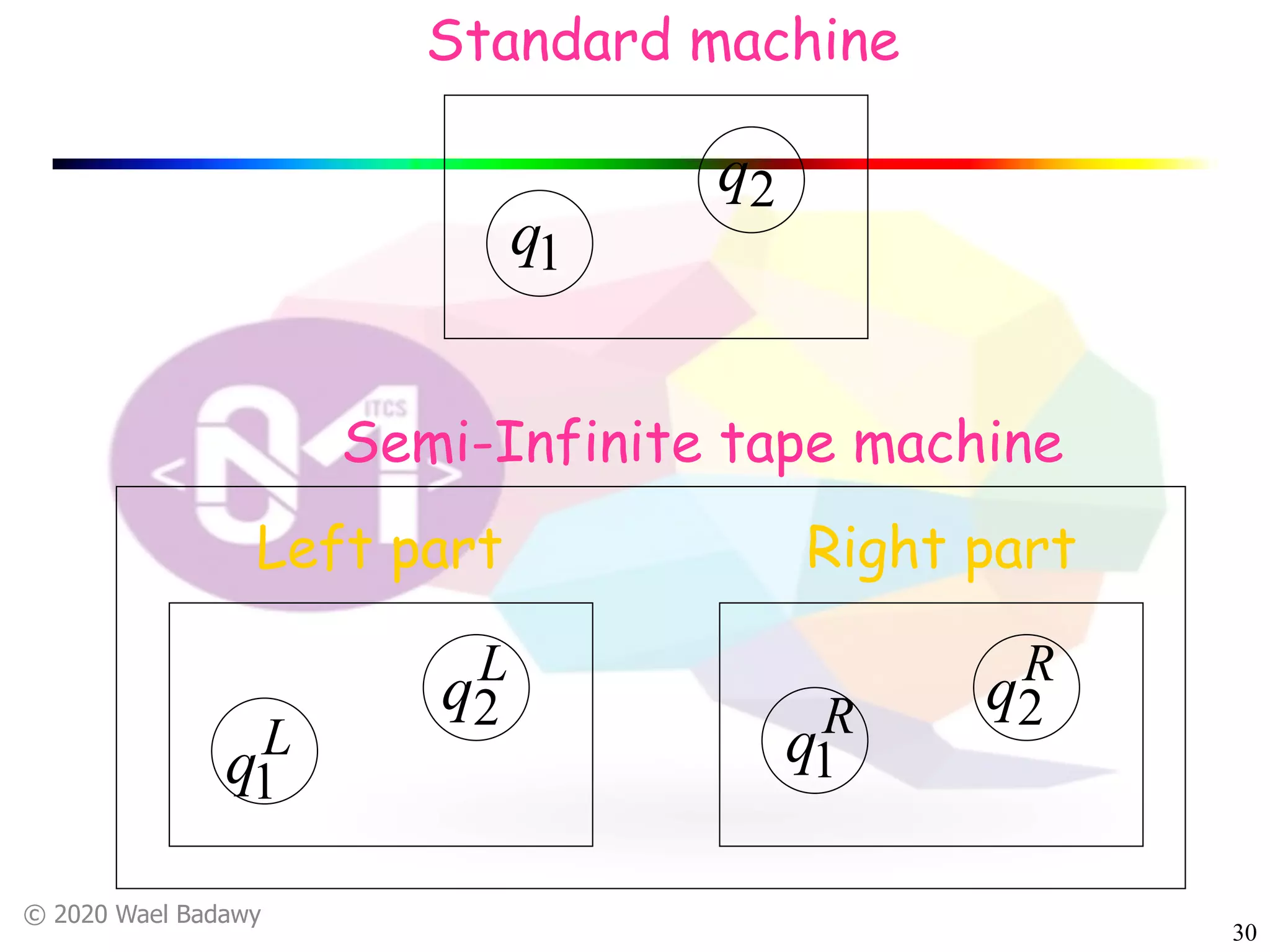
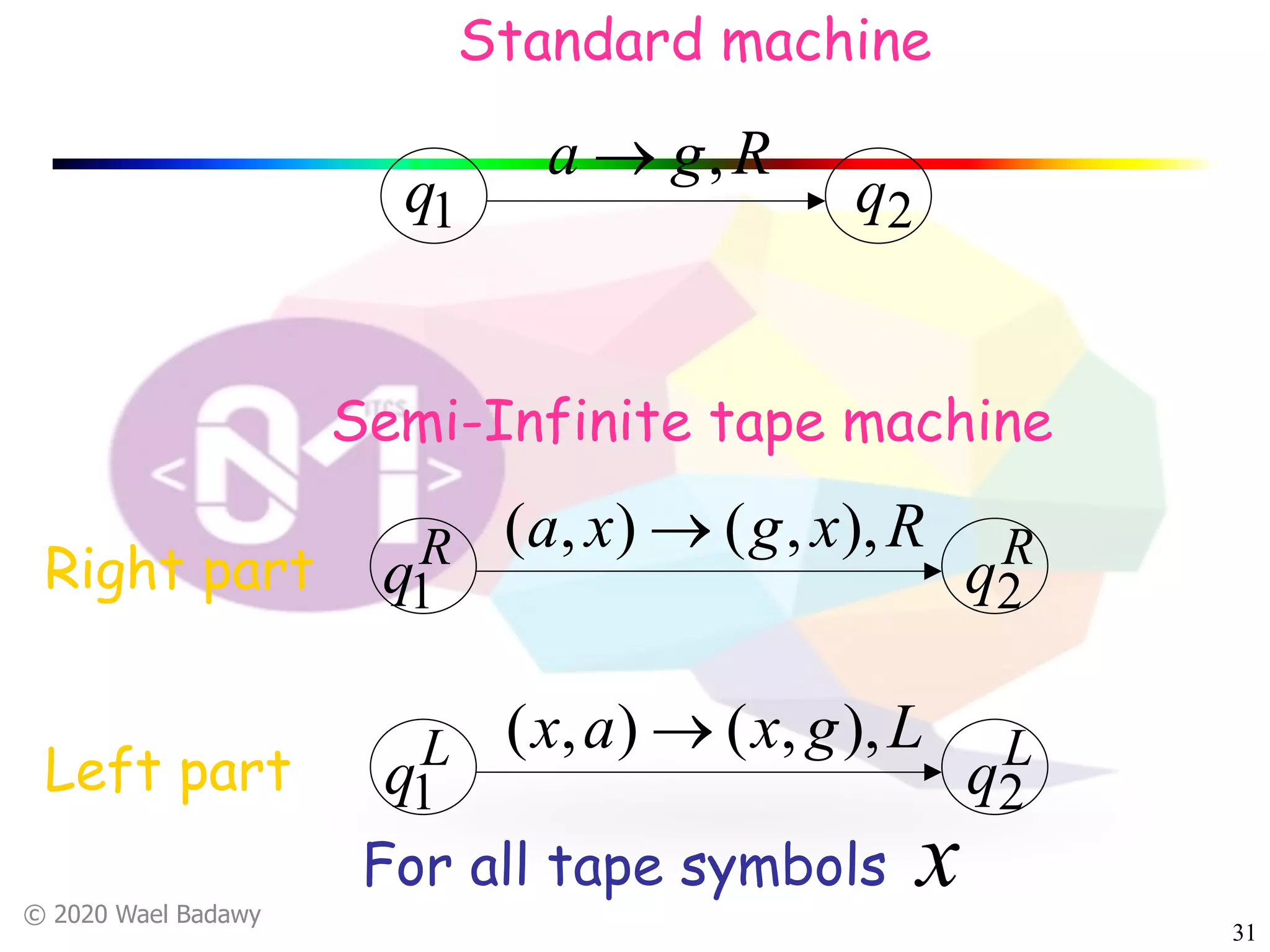
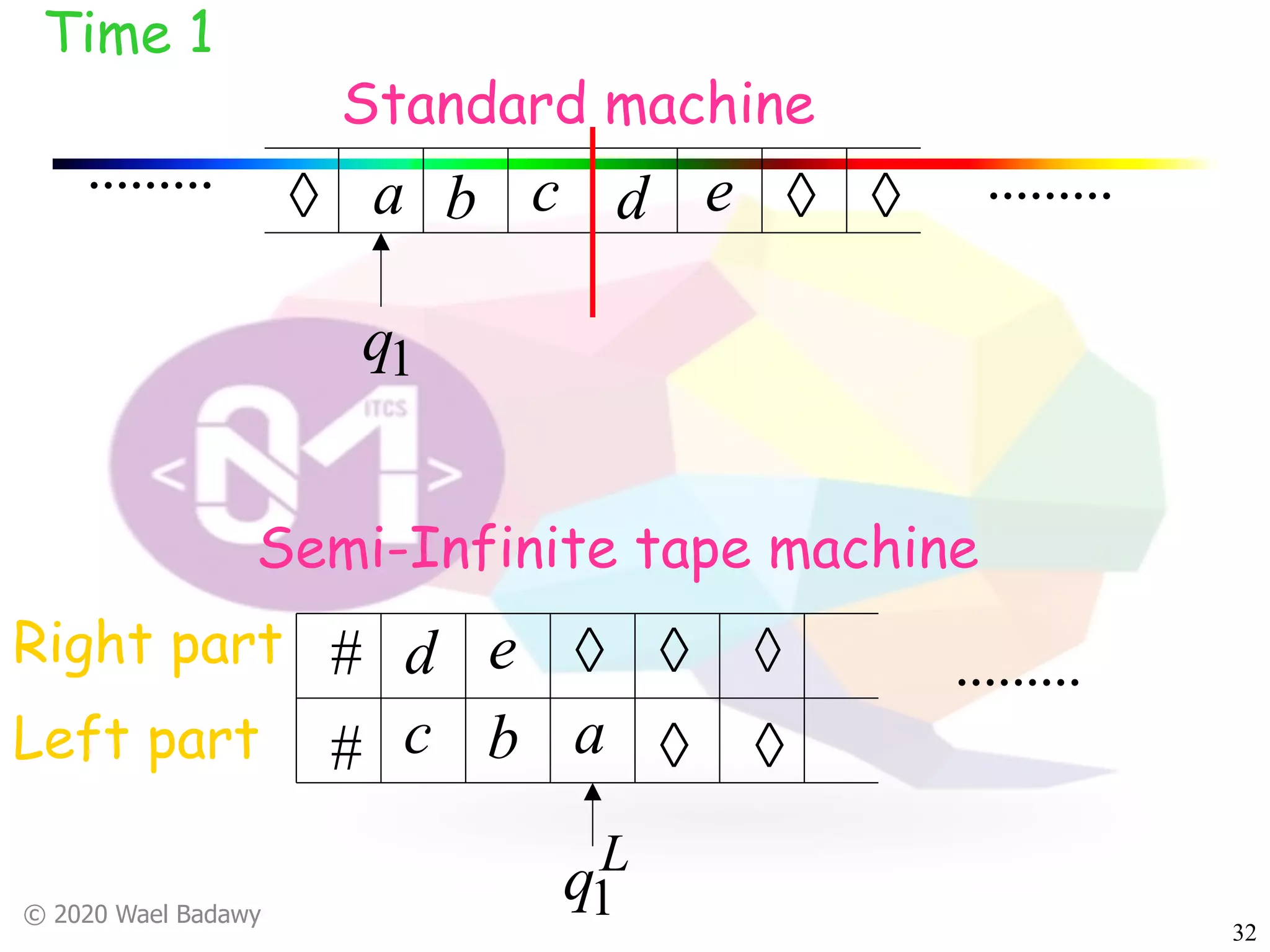
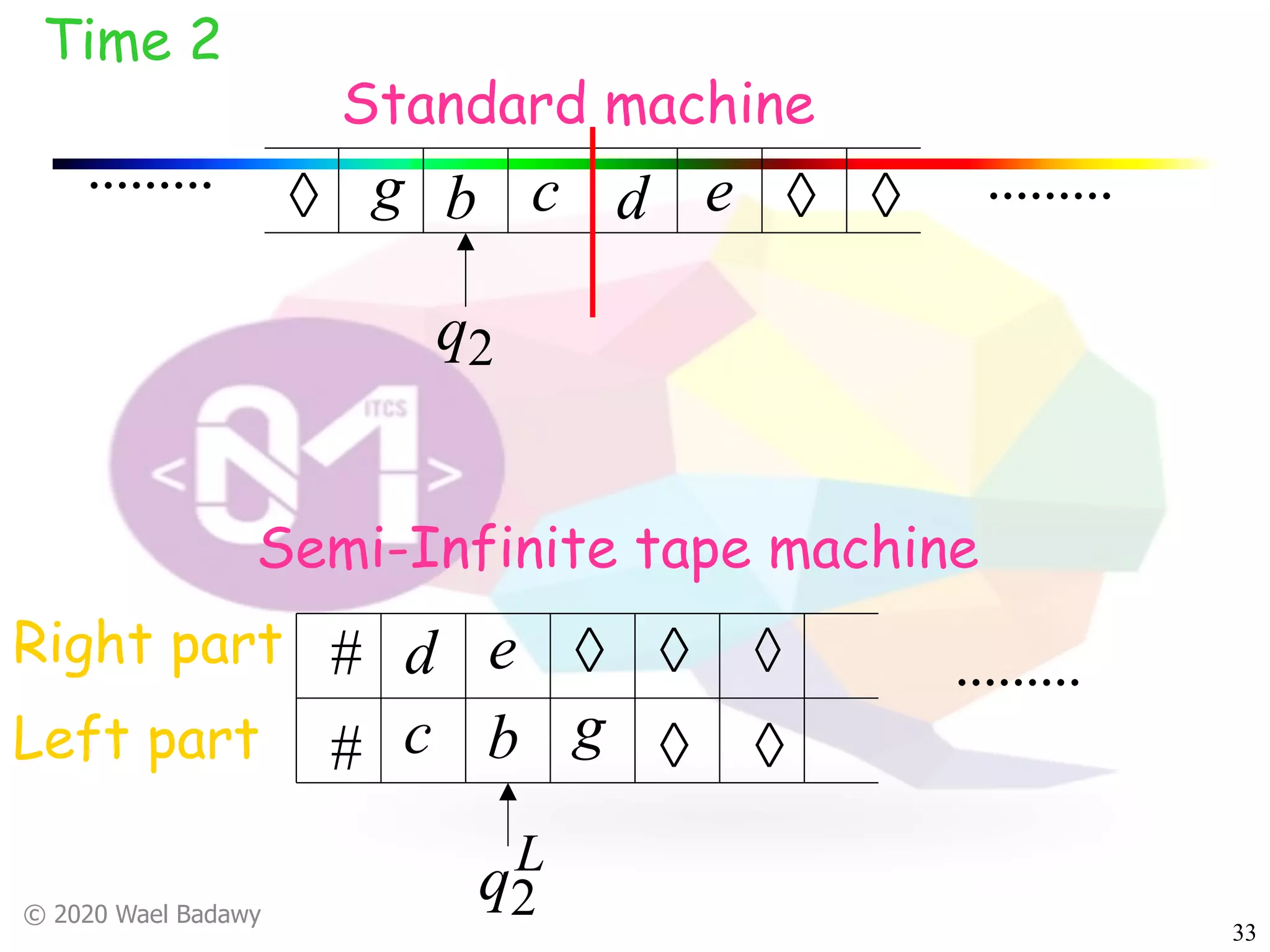
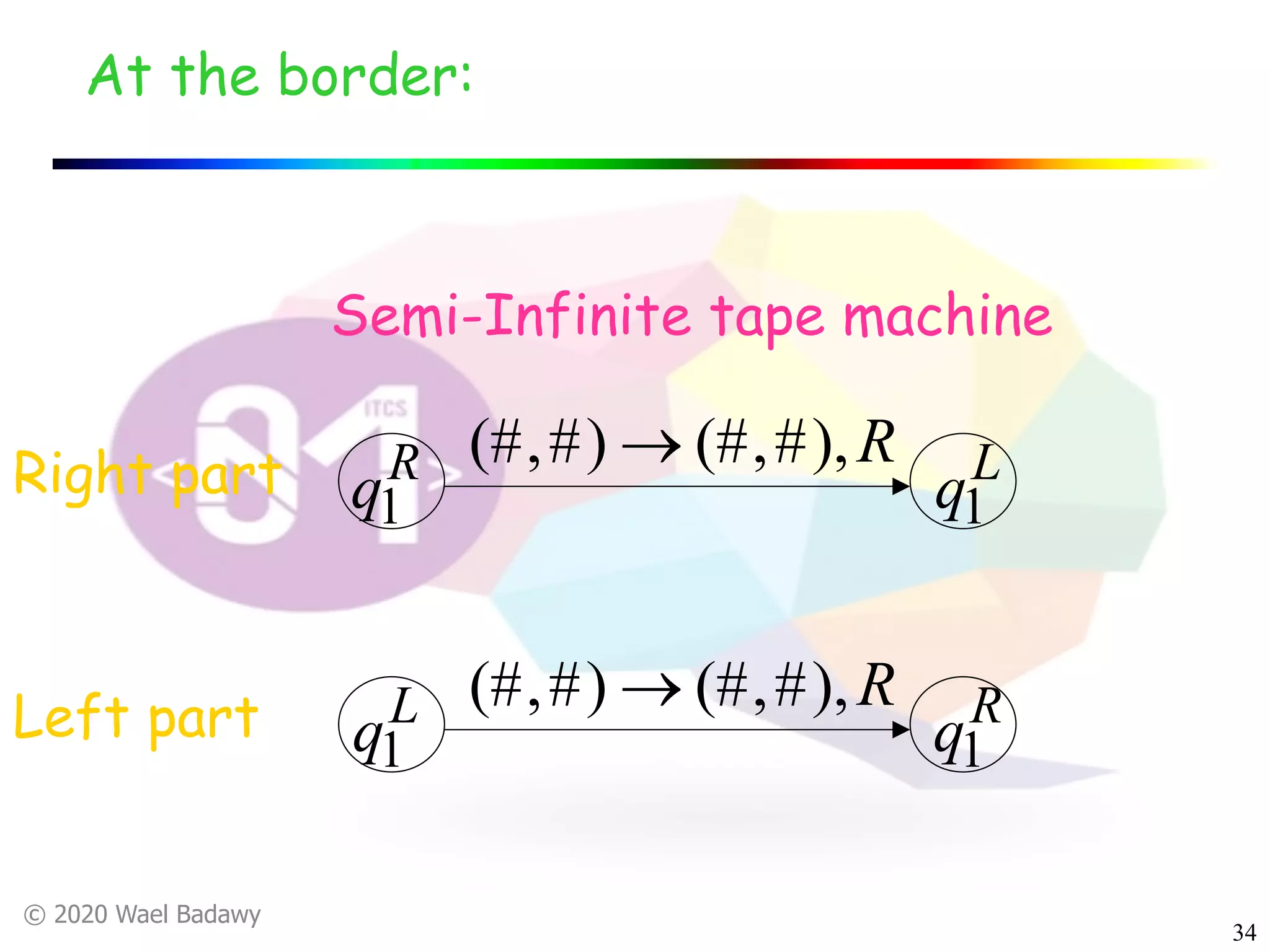
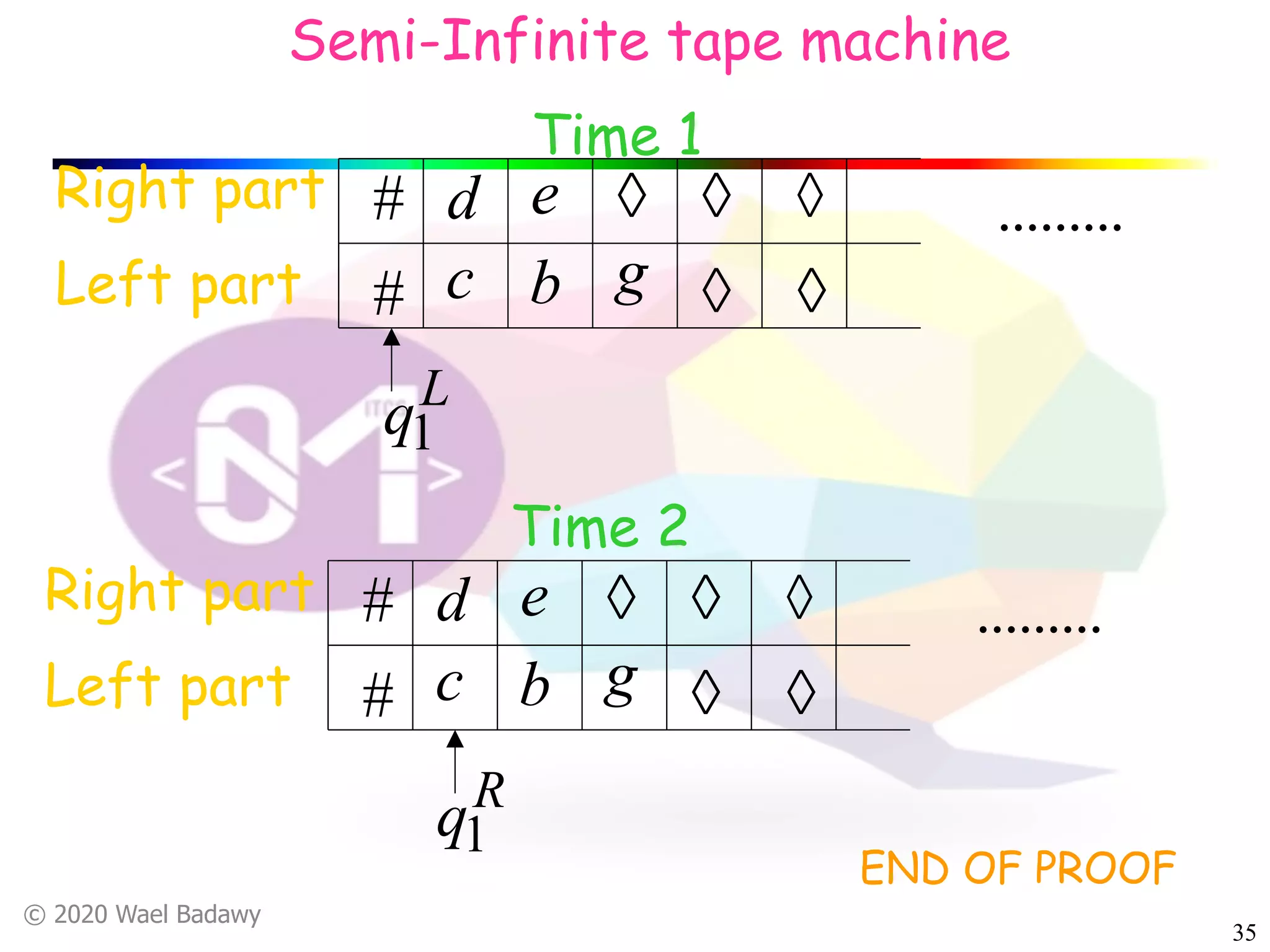
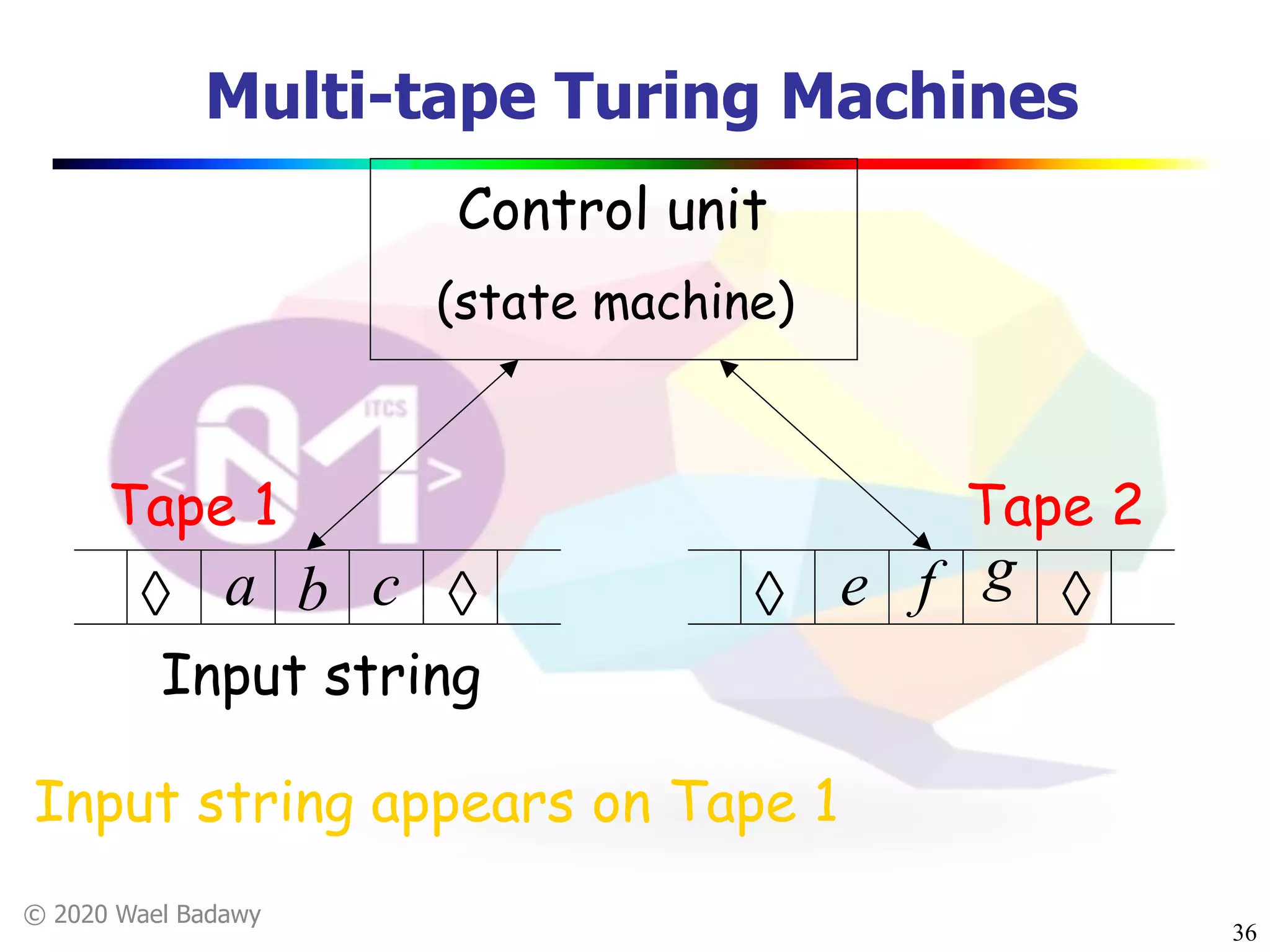
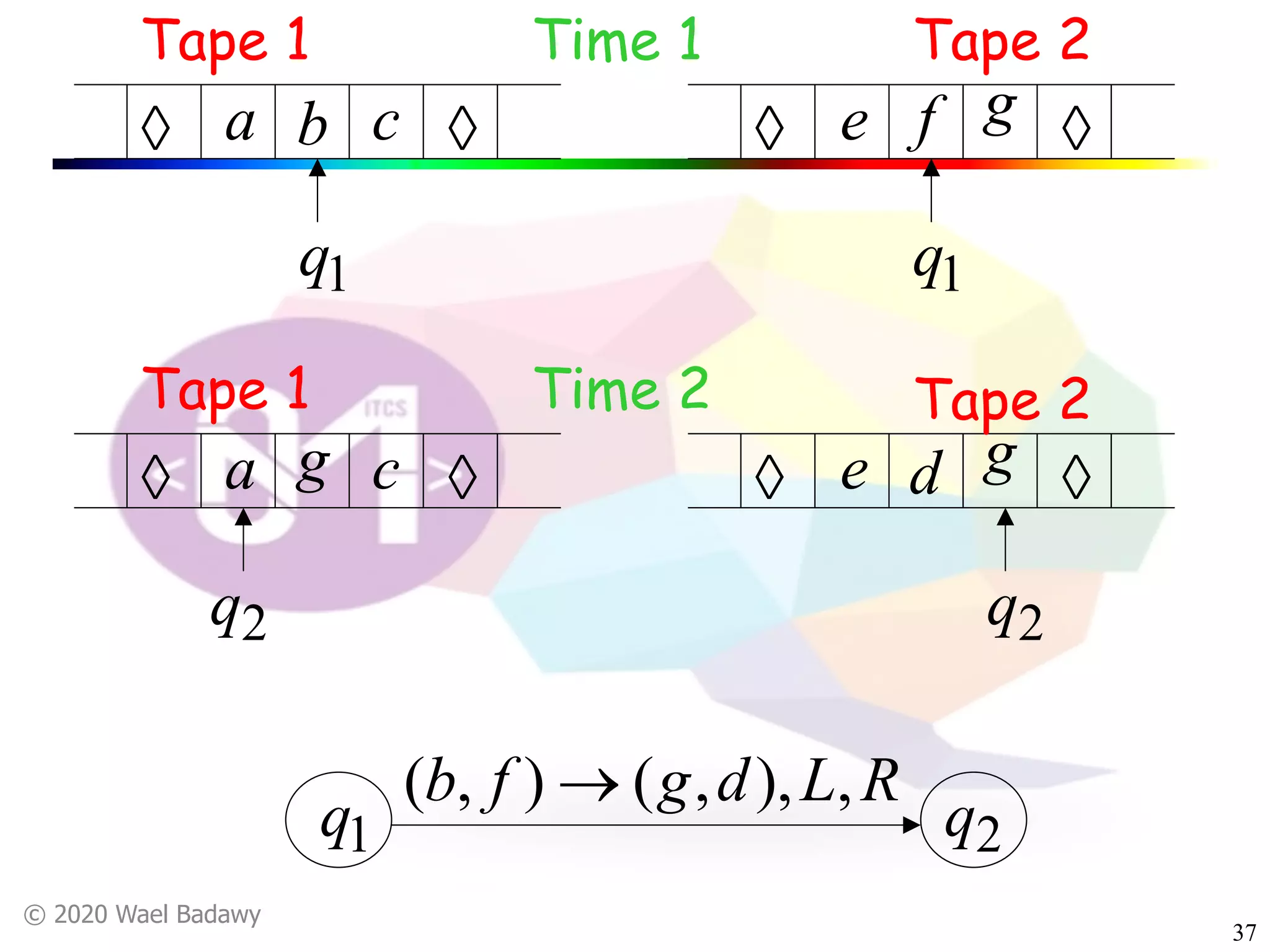
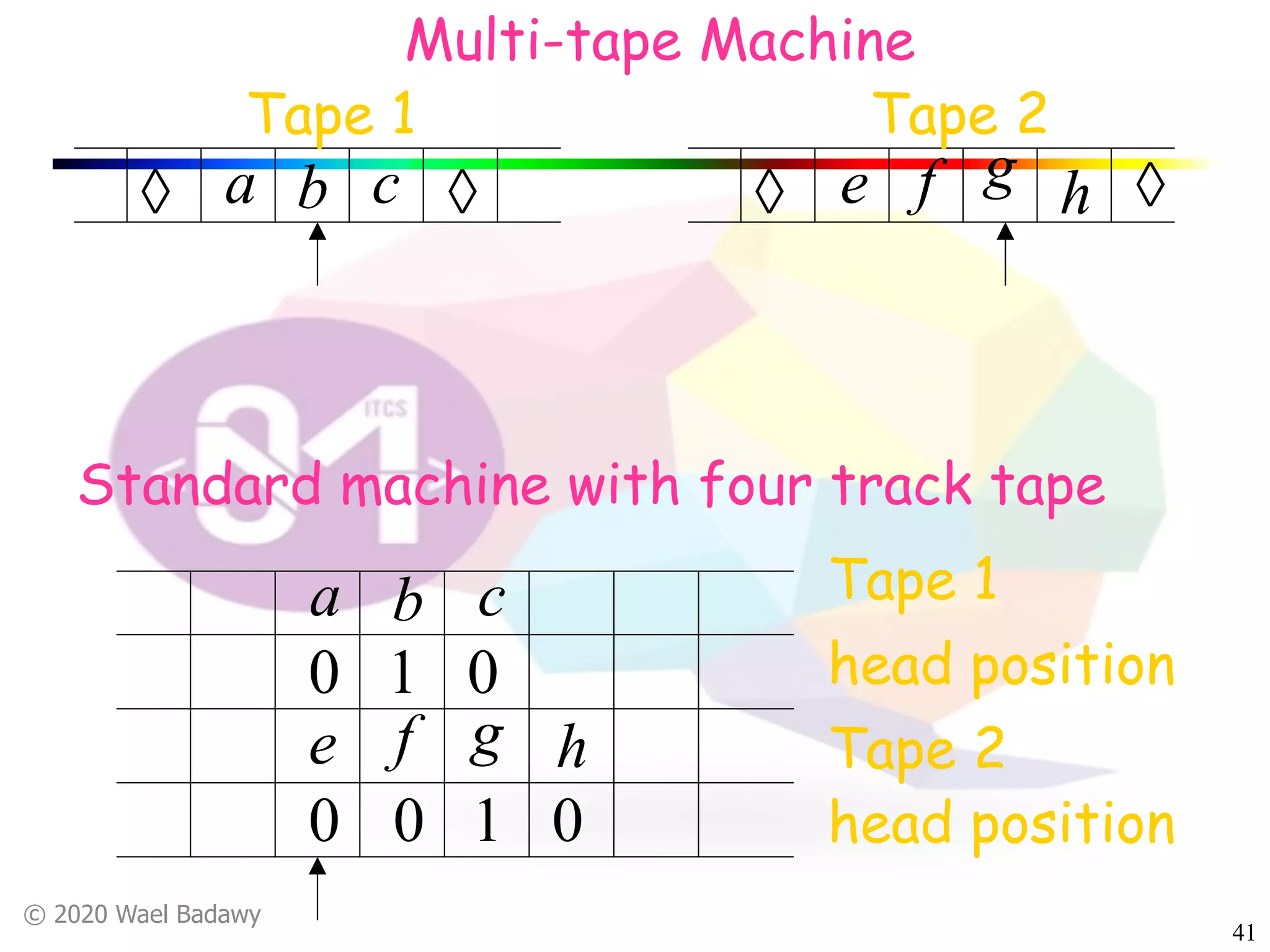
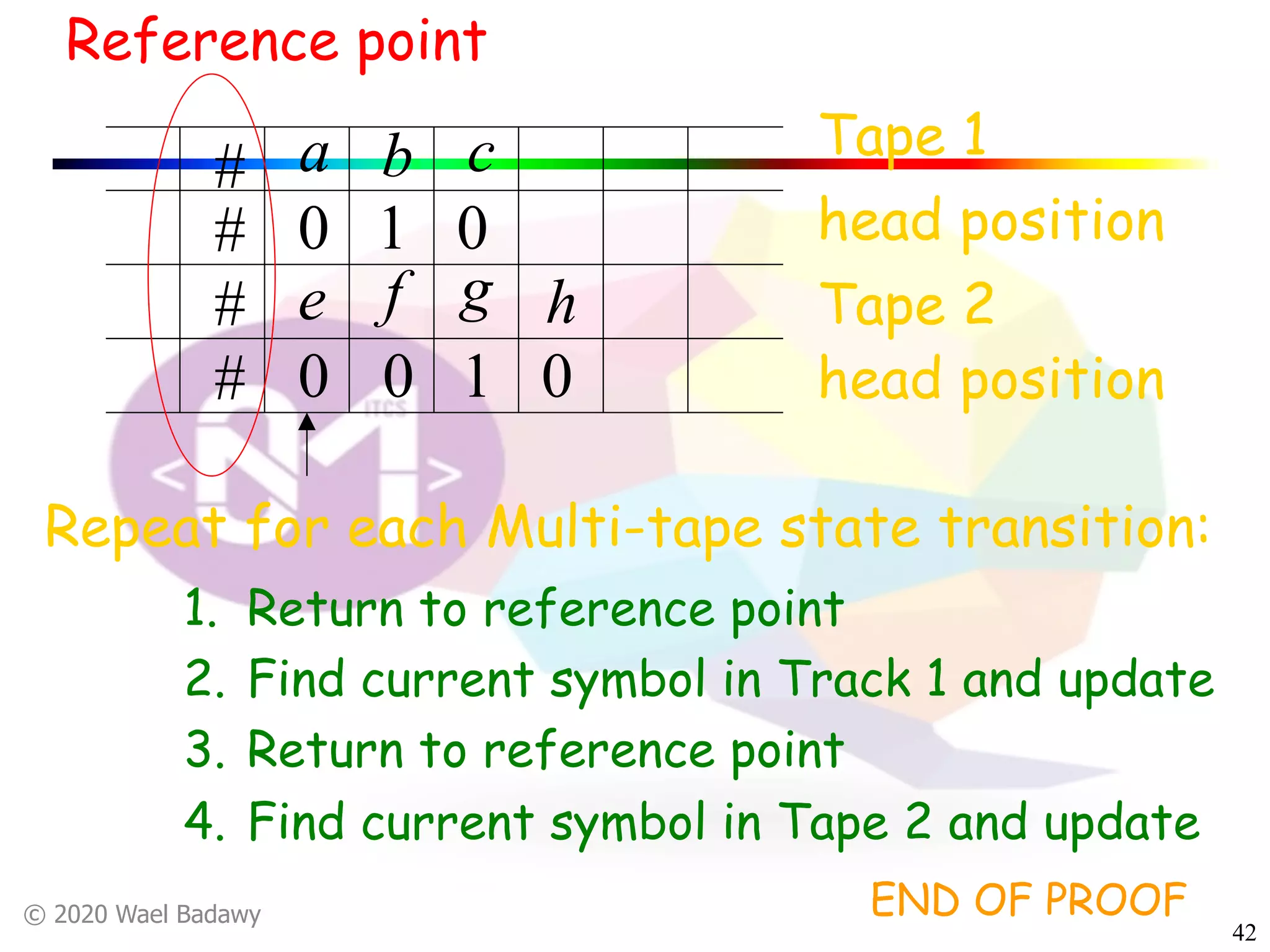
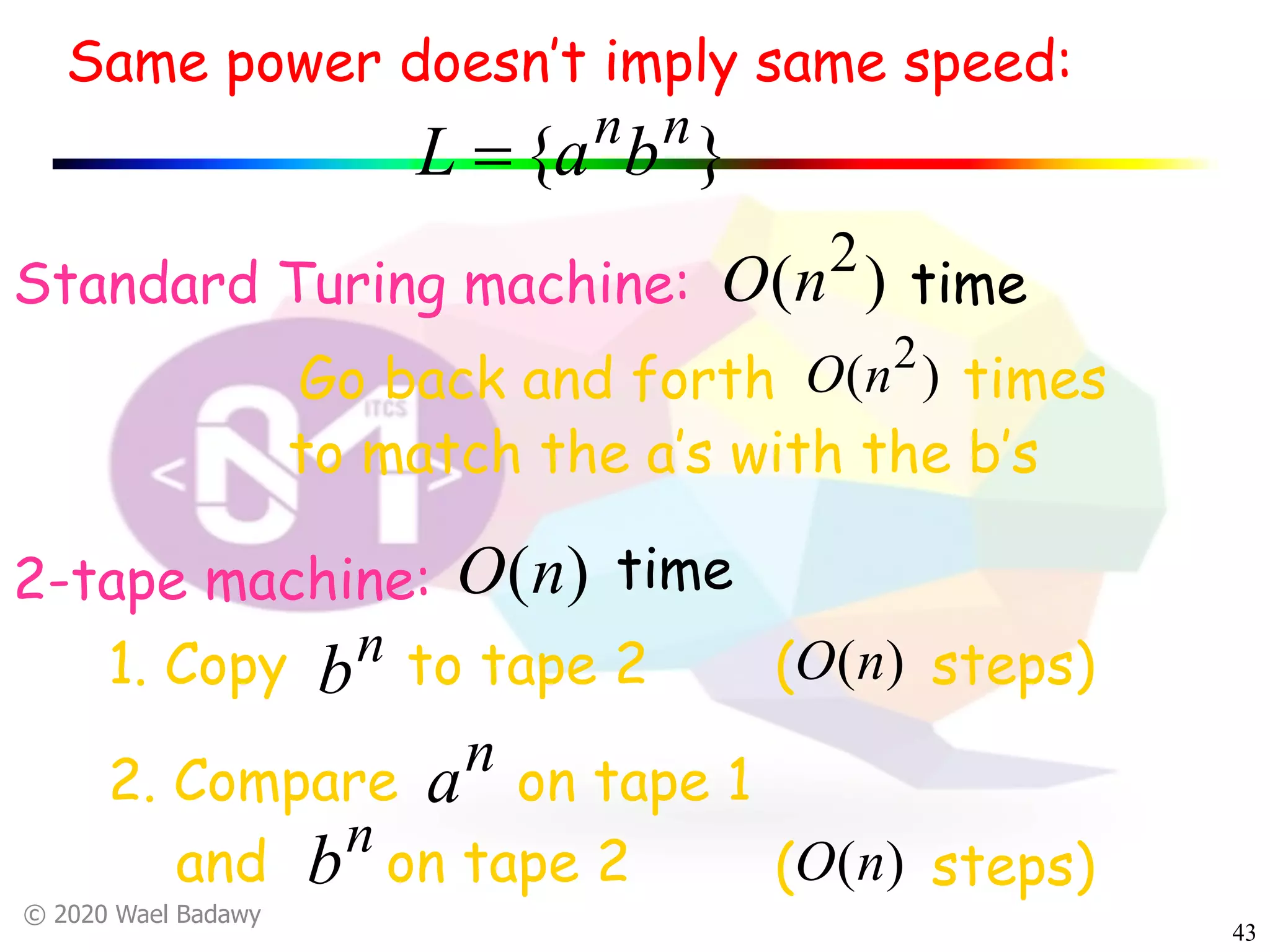
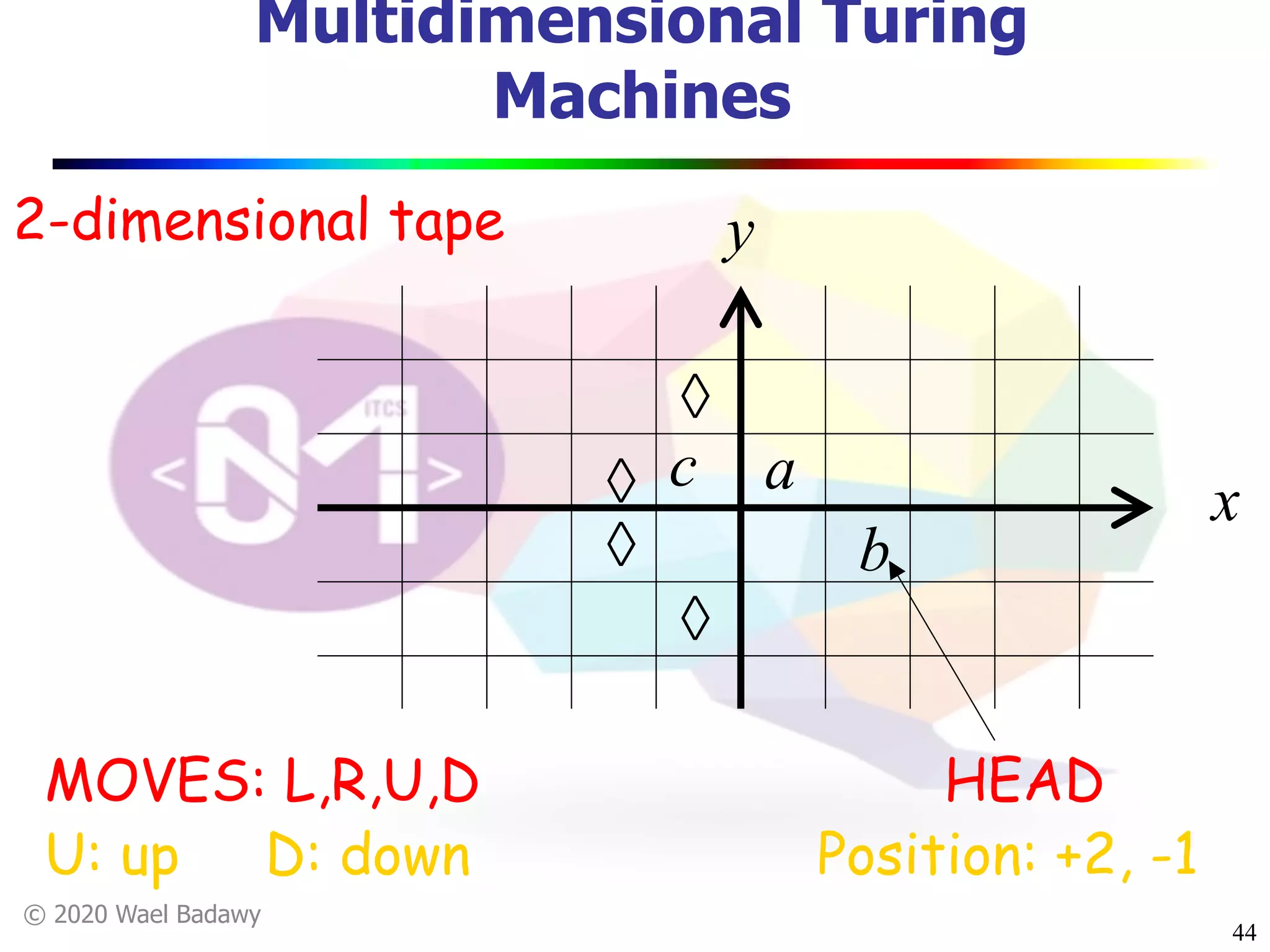
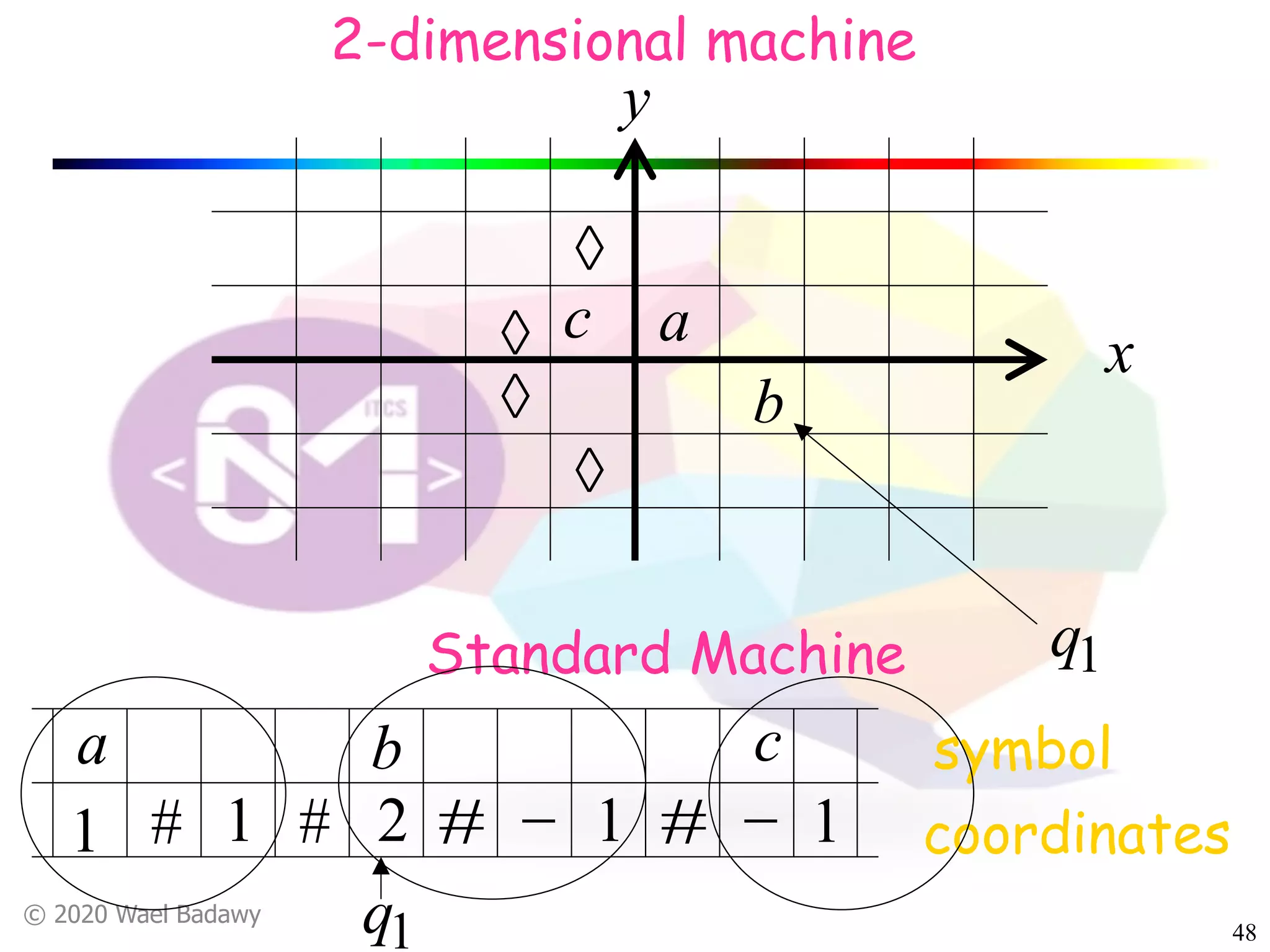
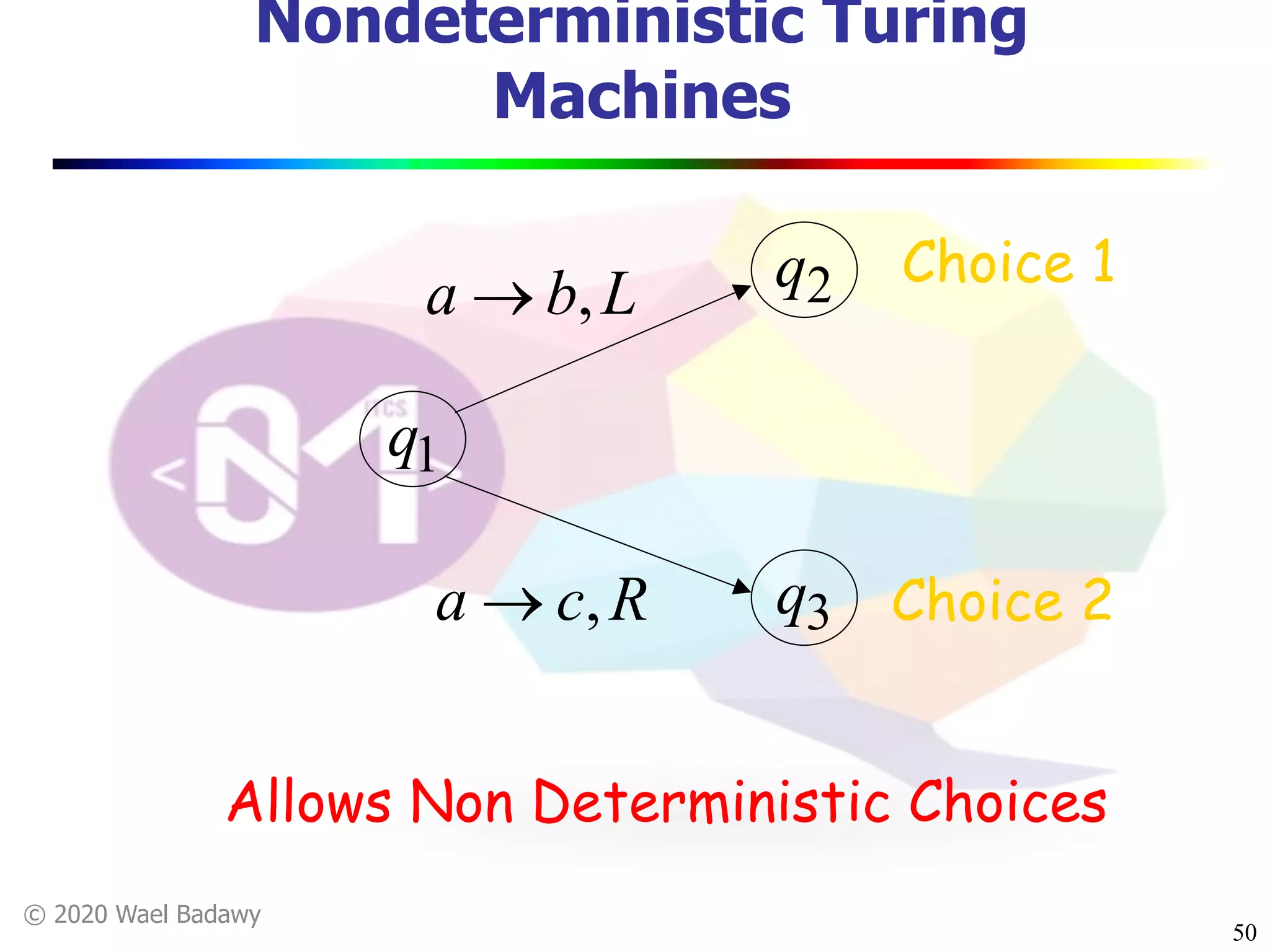
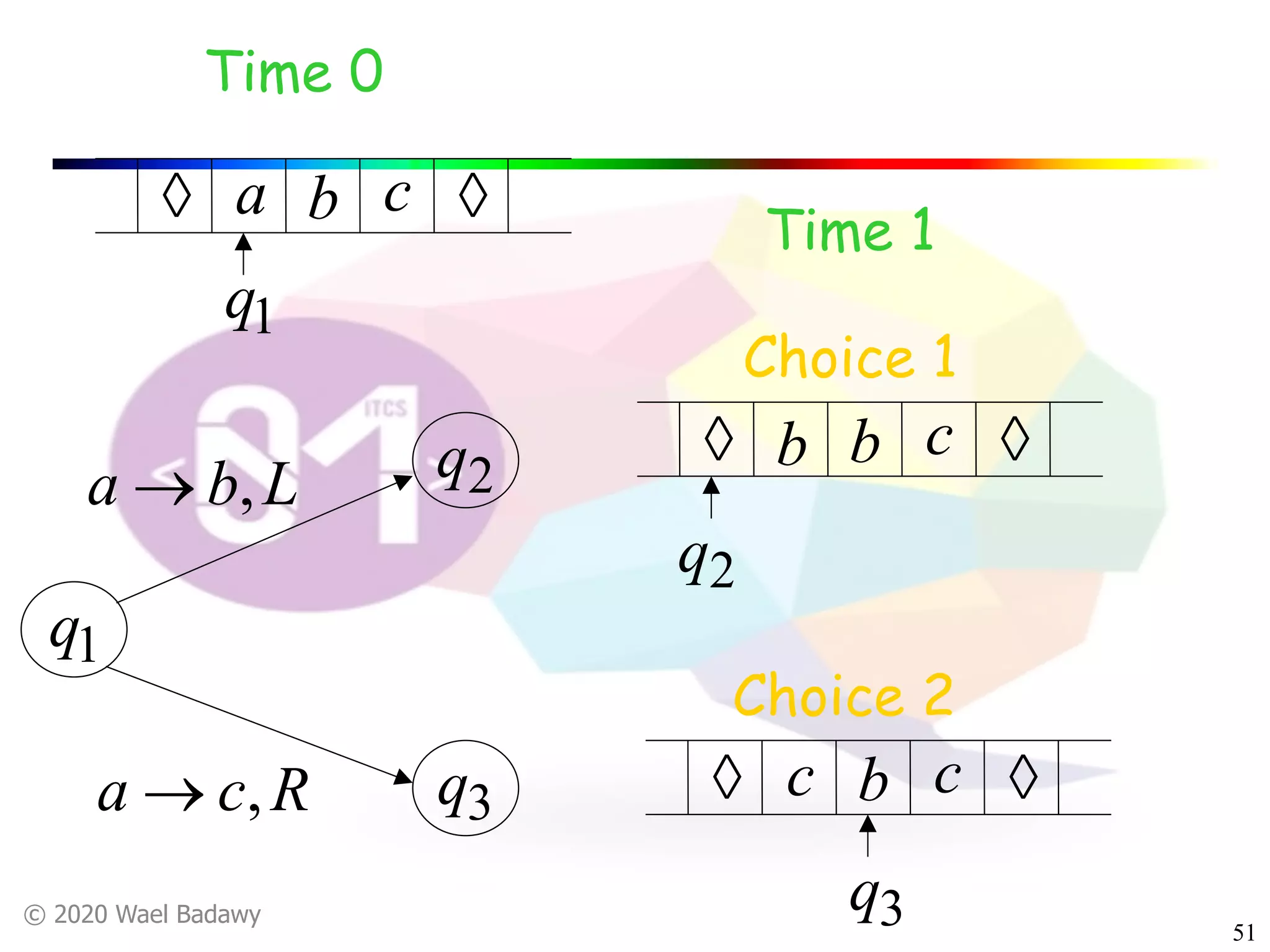
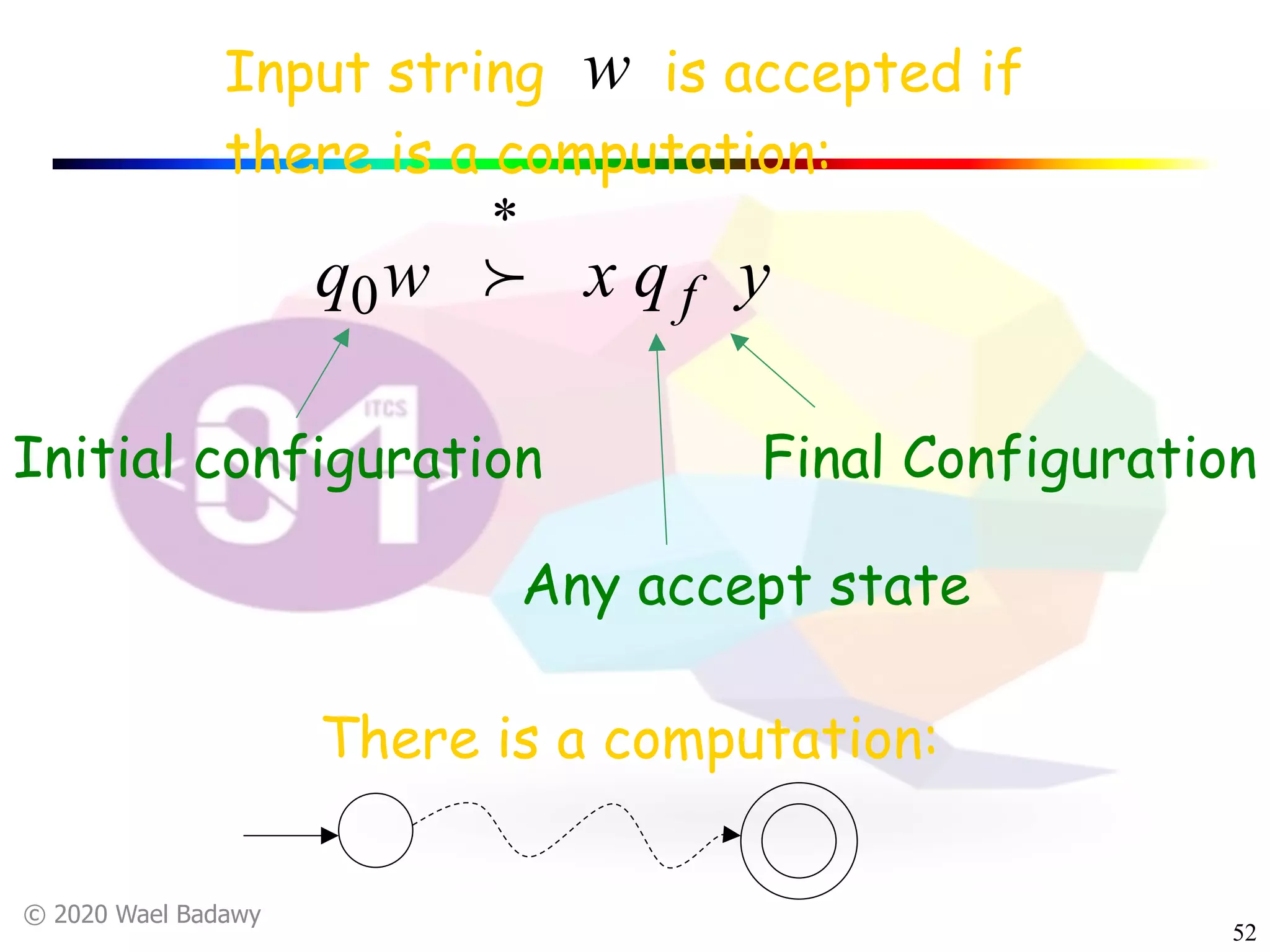
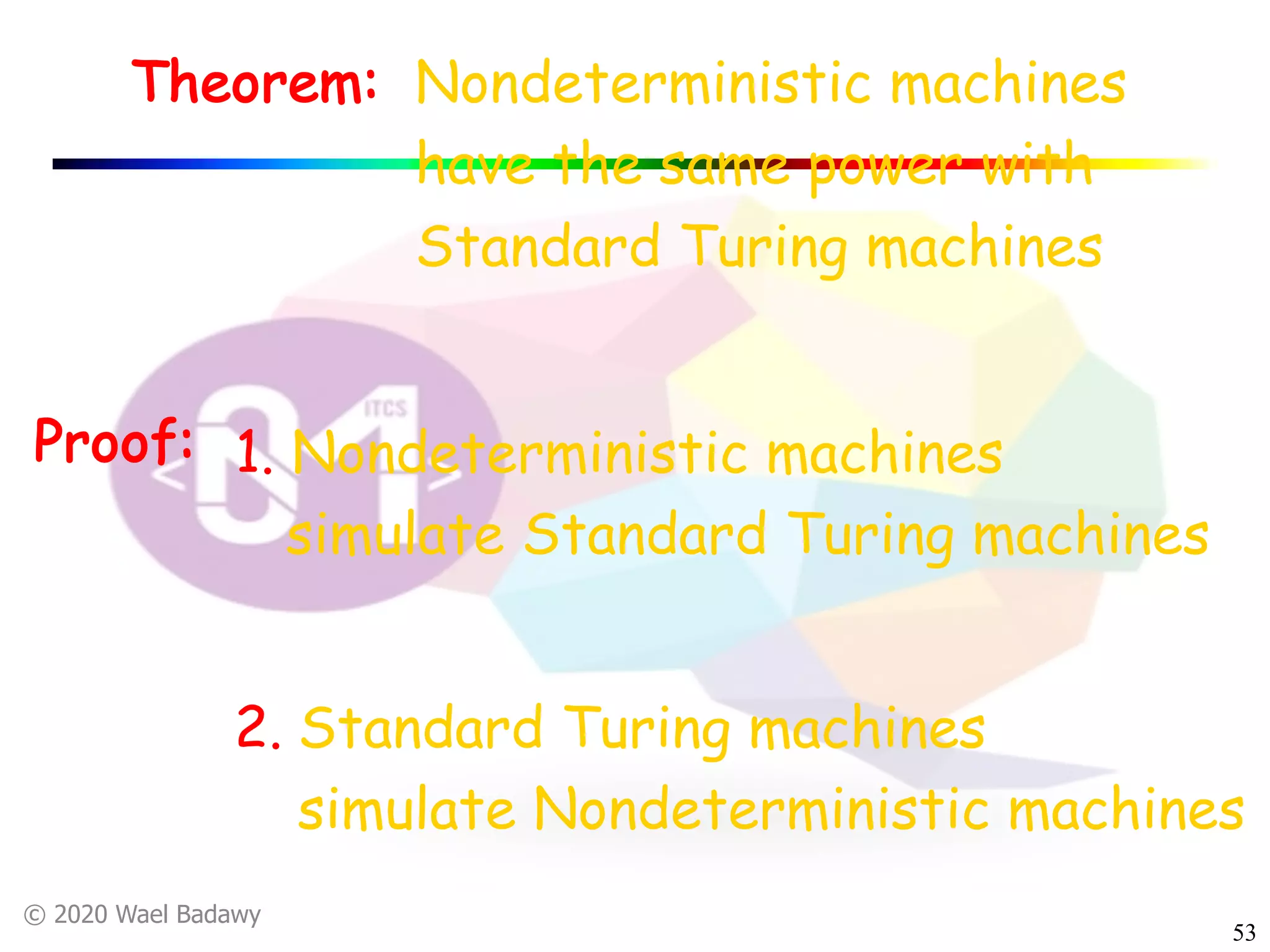
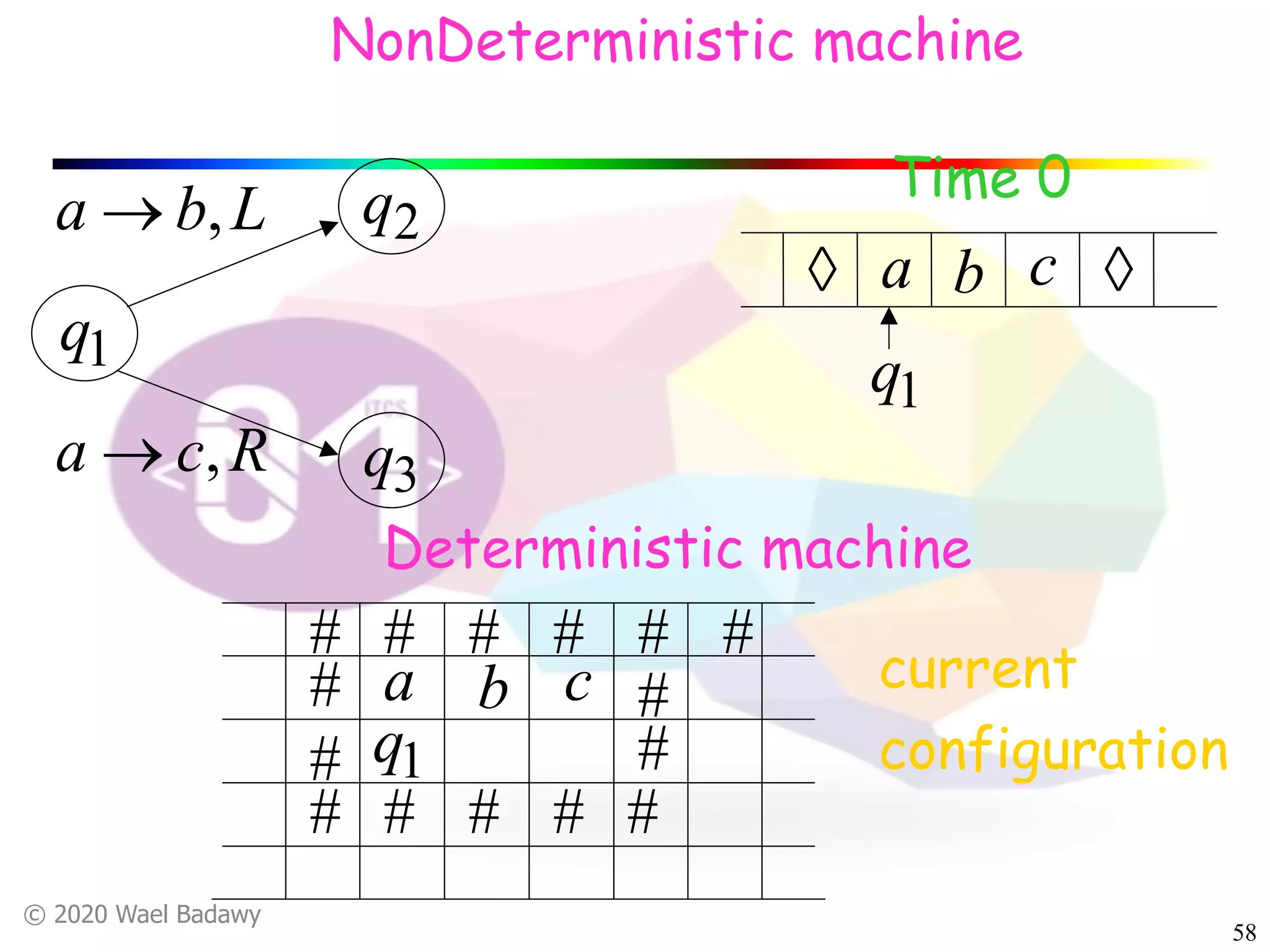
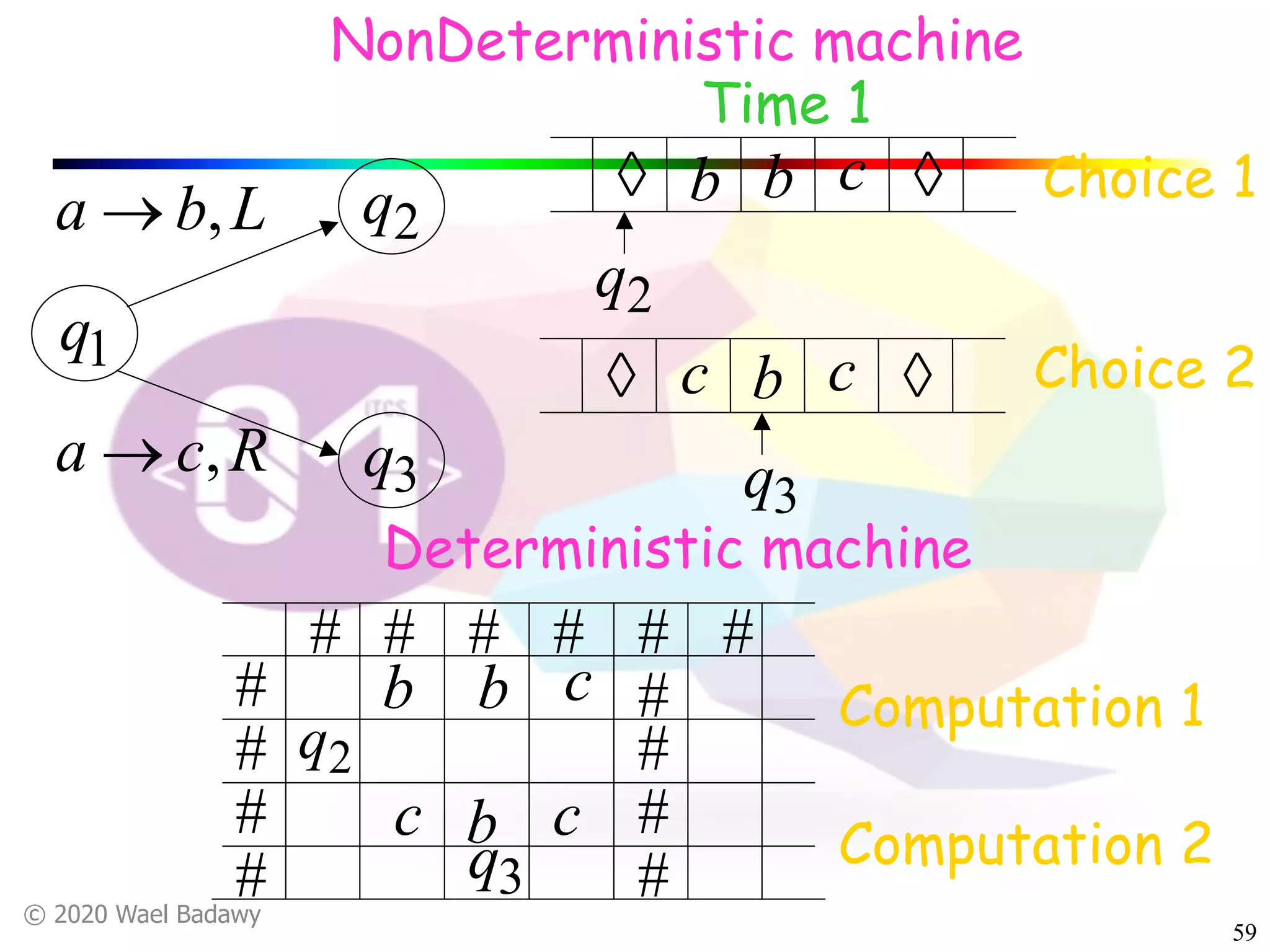
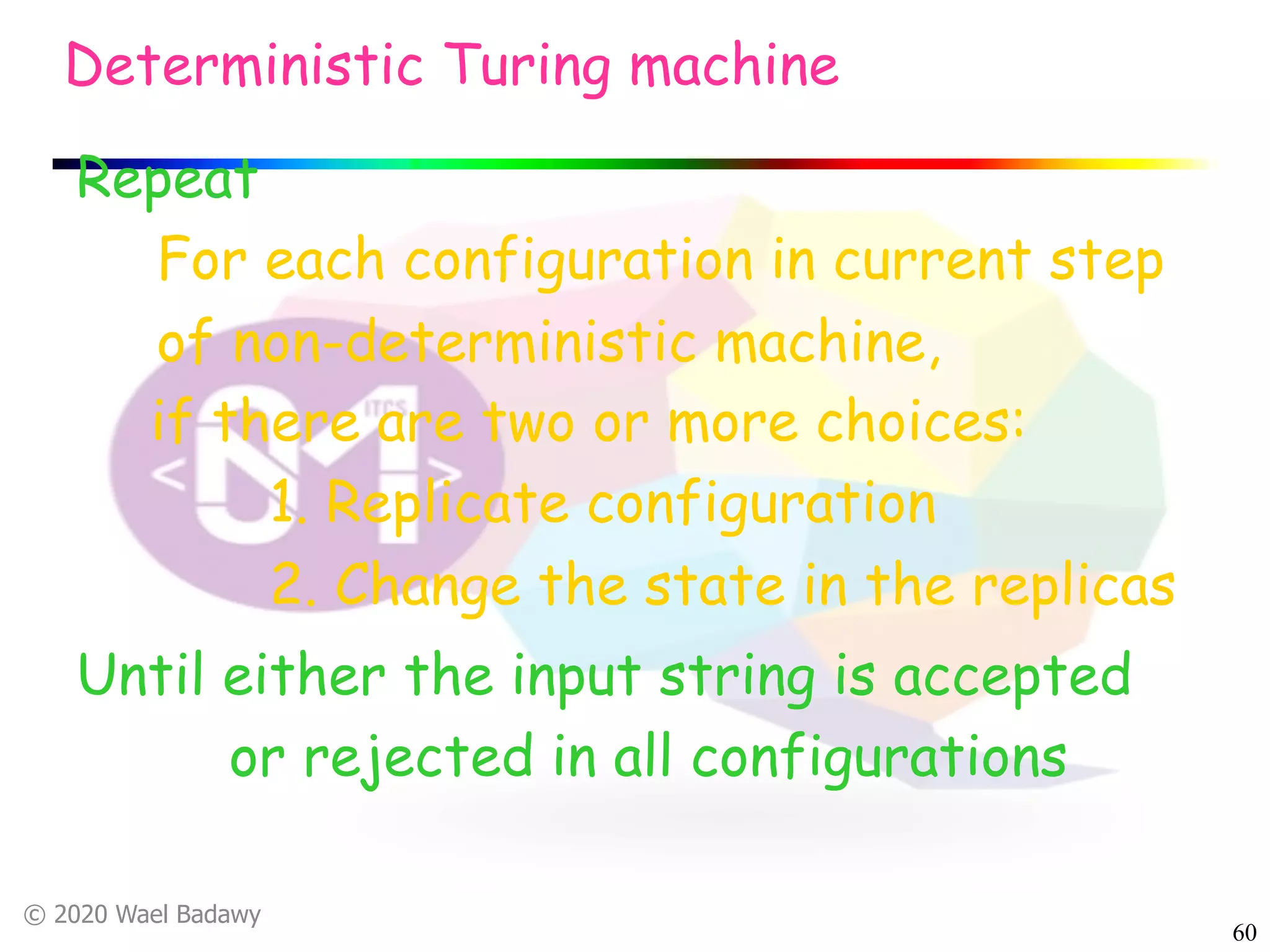
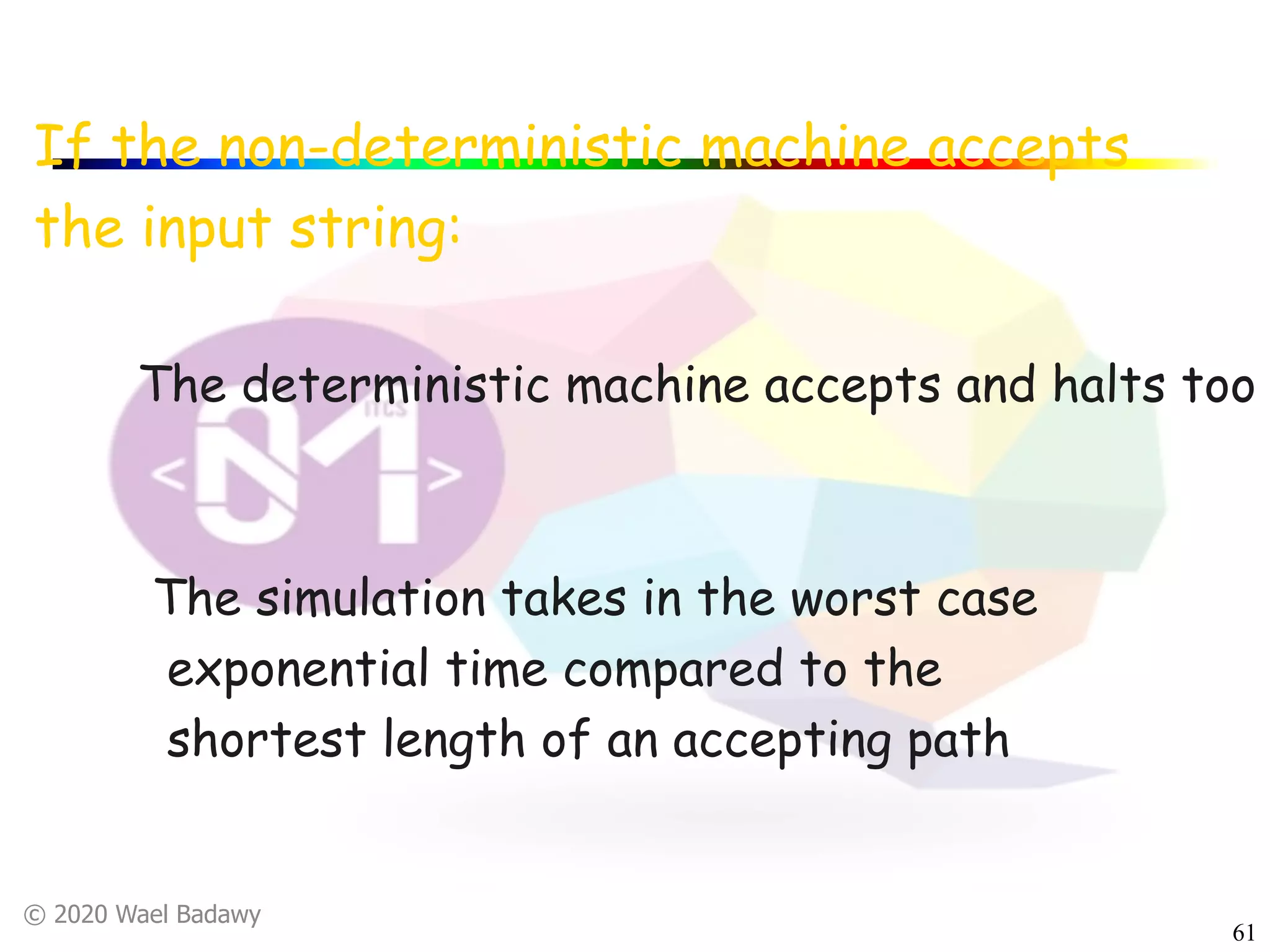

The document discusses variations of Turing machines and proves they have the same computational power as standard Turing machines. It introduces Turing machines with additional capabilities like staying in place, semi-infinite tapes, multiple tapes, and multiple dimensions. It then proves that each variation can simulate a standard Turing machine and vice versa through techniques like tracking multiple tape positions or dimensions on a single tape. This establishes that all the machine variations accept the same formal languages.