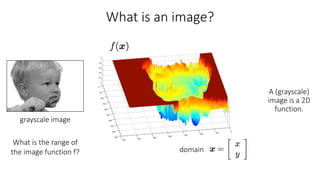
This document summarizes key points from a lecture on 2D image transformations:
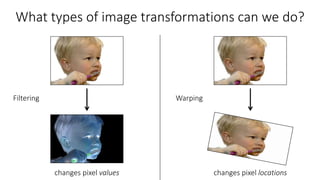
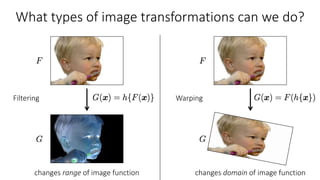
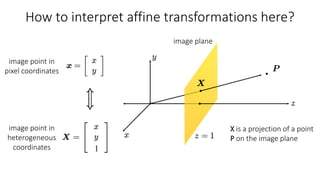
- 2D image transformations can be classified as either changing pixel values (filtering) or changing pixel locations (warping).
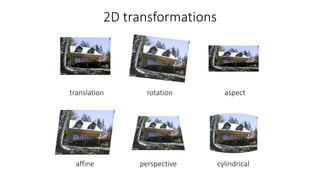
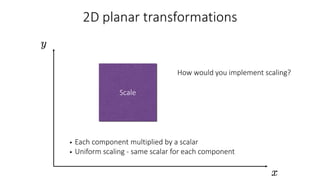
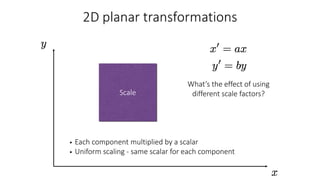
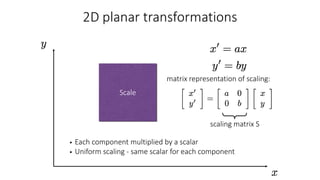
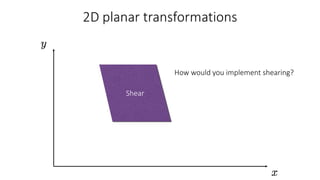
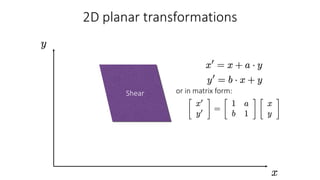
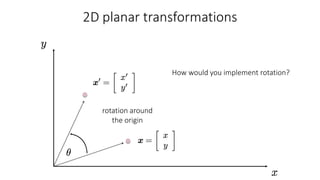
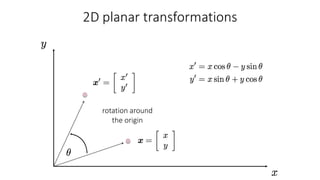
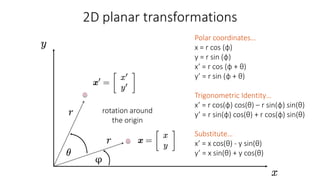
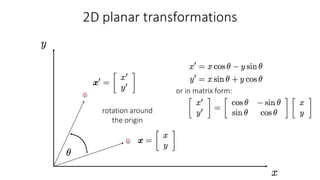
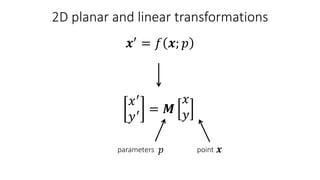
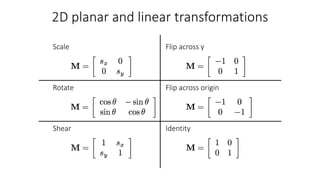
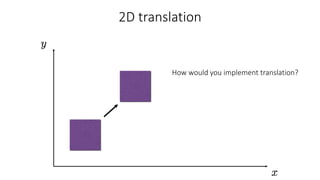
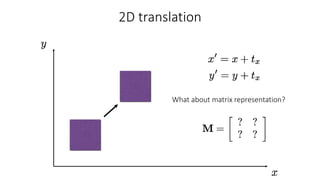
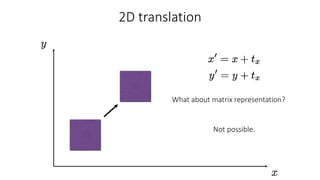
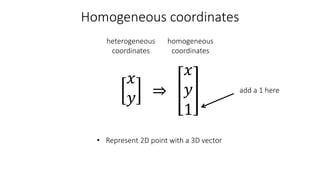
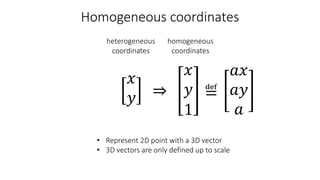
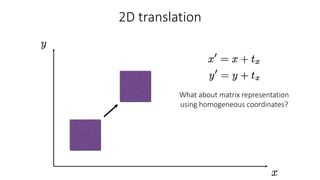
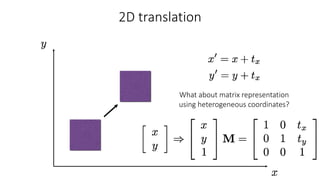
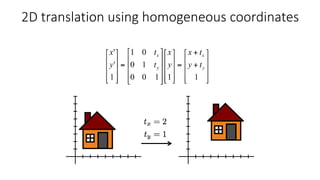
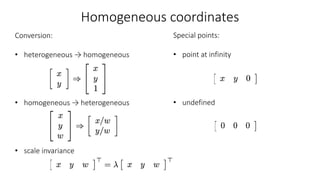
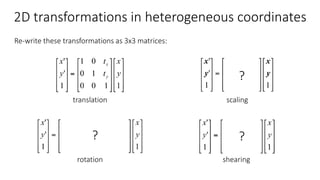
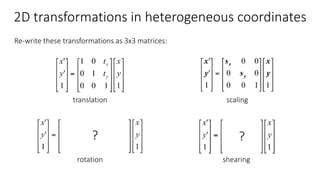
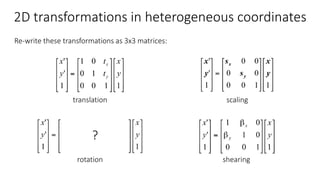
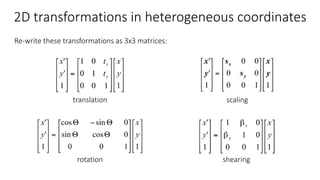
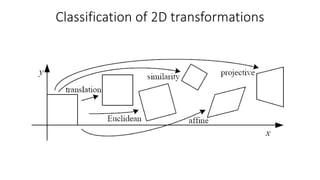
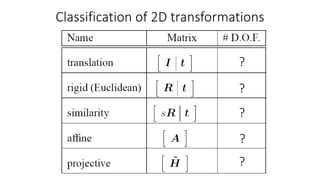
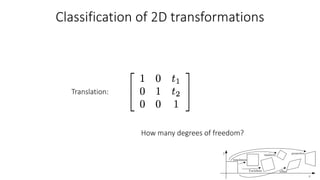
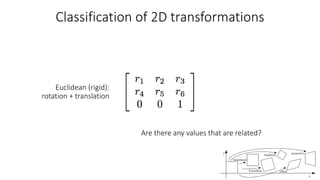
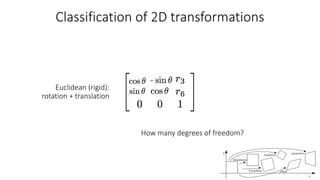
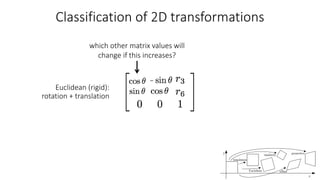
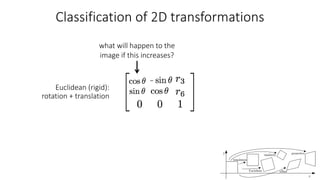
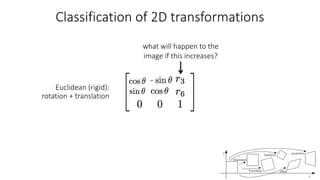
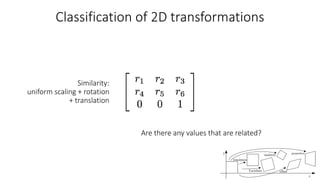
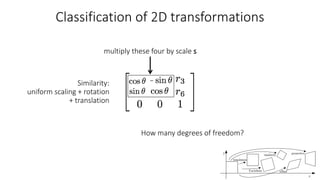
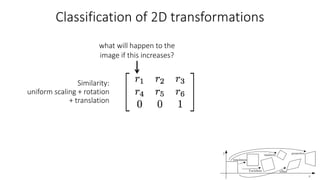
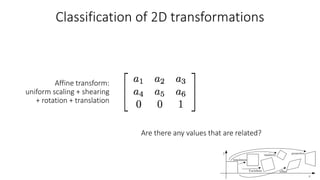
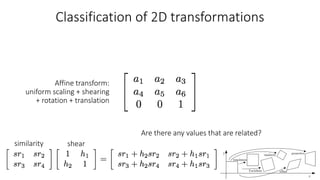
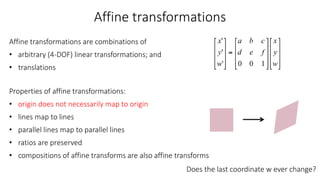
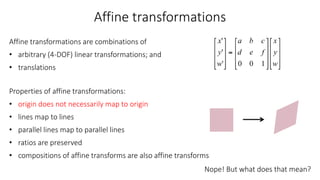
- Common 2D transformations discussed include translation, rotation, scaling, shearing, and affine transformations. Matrix representations of these transformations using homogeneous coordinates were presented.
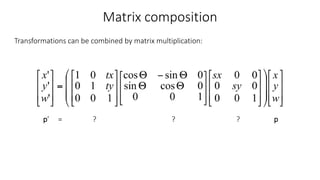
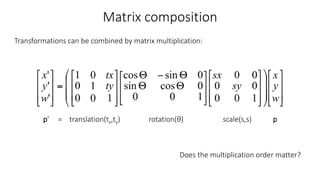
- Transformations can be combined through matrix multiplication. The order of multiplication matters.
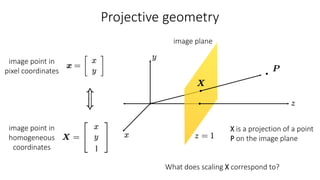
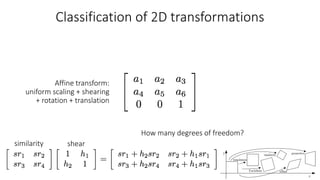
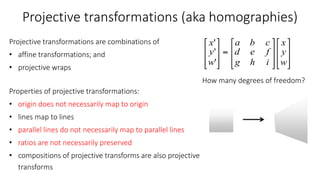
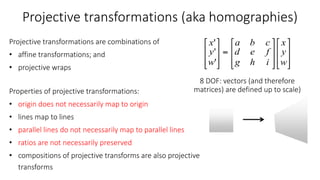
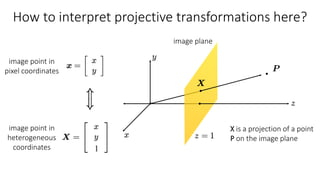
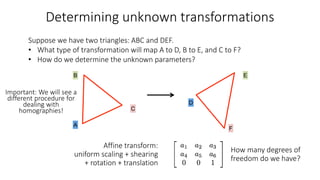
- Transformations were classified based on degrees of freedom, with affine transformations having 6 degrees and projective transformations having 8 degrees of freedom.
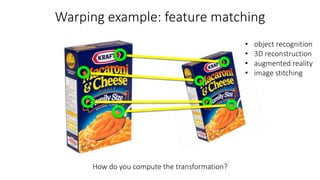
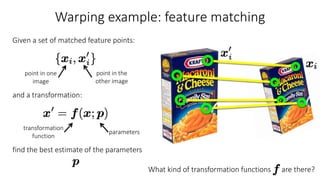
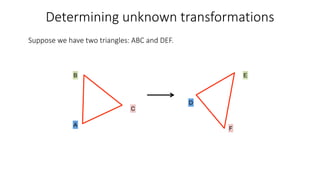
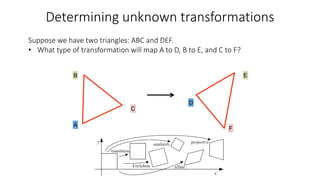
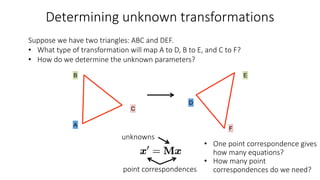
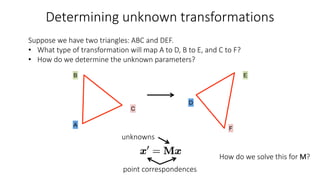
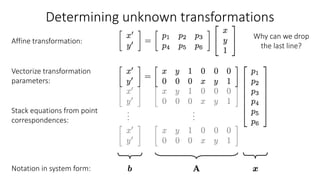
- Determining unknown affine transformations from point correspondences between images was discussed. At least 3 point correspondences are needed

















![[DL輪読会]Object-Centric Learning with Slot Attention](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0717-200717023021-thumbnail.jpg?width=640&height=640&fit=bounds)