Download as PDF, PPTX
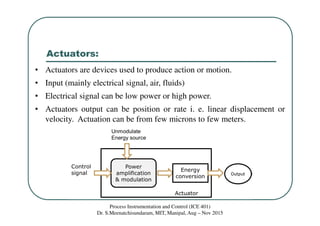
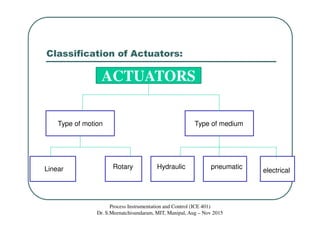
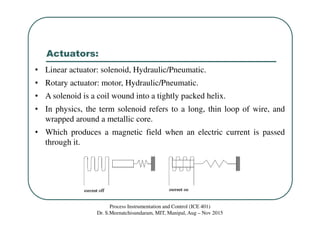
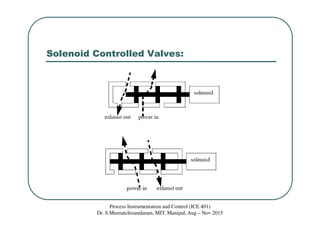
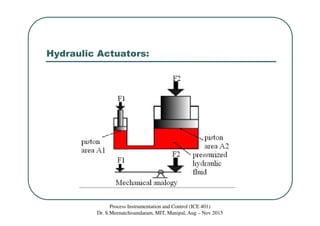
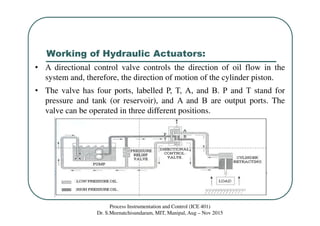
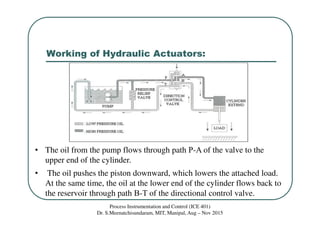
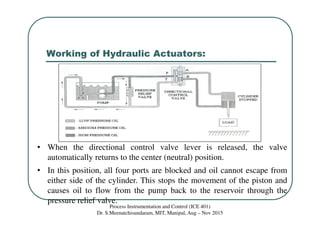
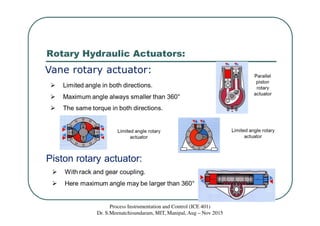
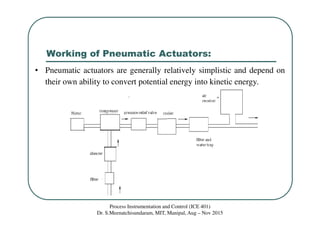
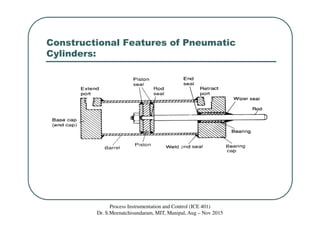
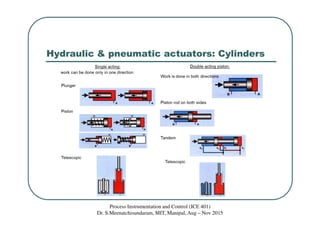
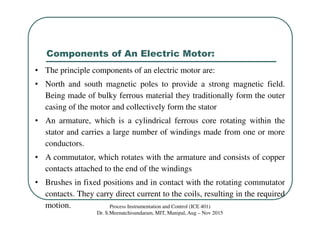

This document discusses various types of actuators used in process instrumentation and control. It describes linear actuators like solenoids and hydraulic/pneumatic actuators, as well as rotary actuators like motors and hydraulic/pneumatic actuators. It provides details on how solenoids, hydraulic actuators, pneumatic actuators, and electrical actuators work. Hydraulic actuators use hydraulic pressure to drive an output based on Pascal's law. Pneumatic actuators convert compressed air into motion, while electrical actuators use magnetic fields and electric current to produce torque.