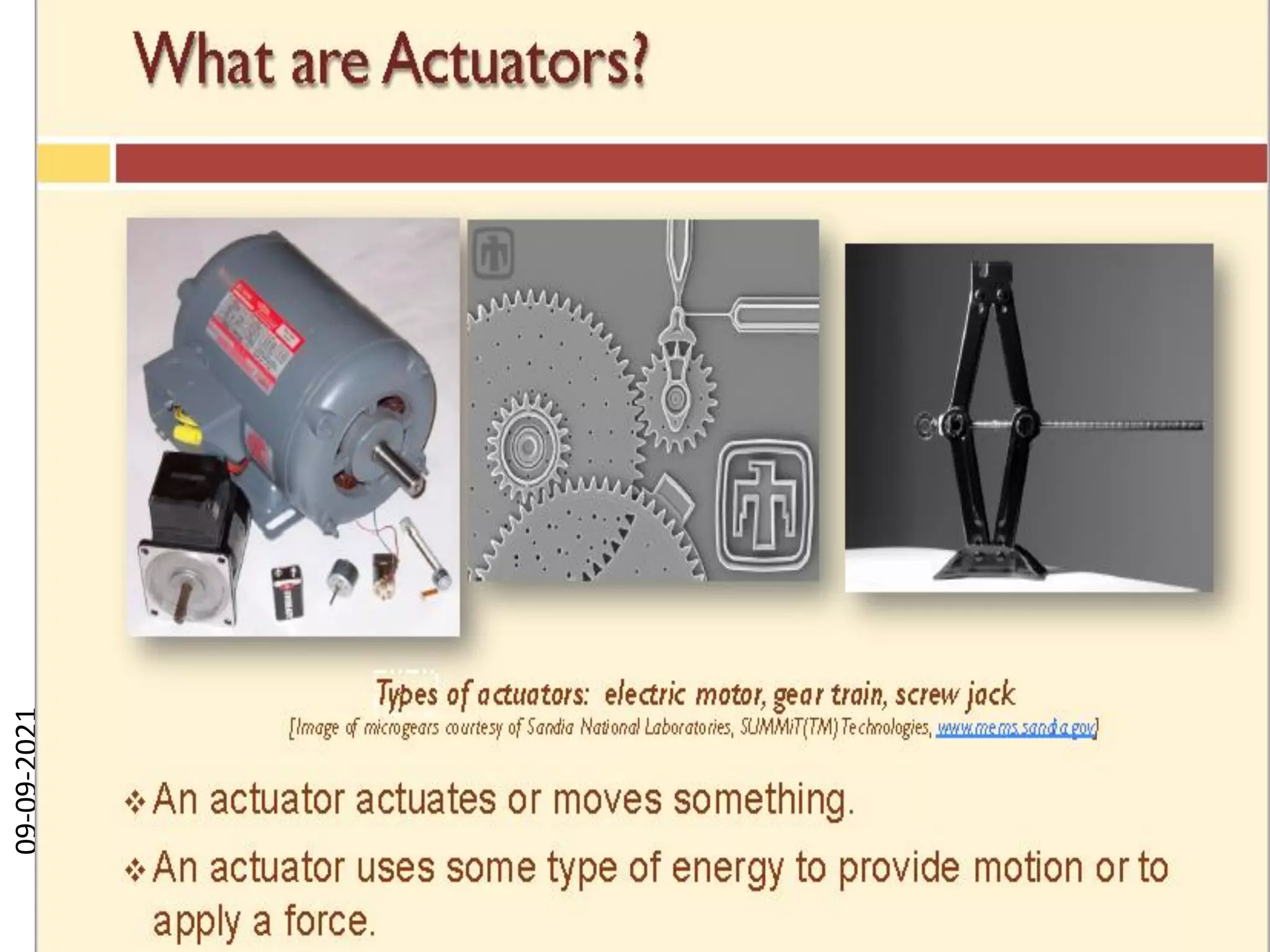
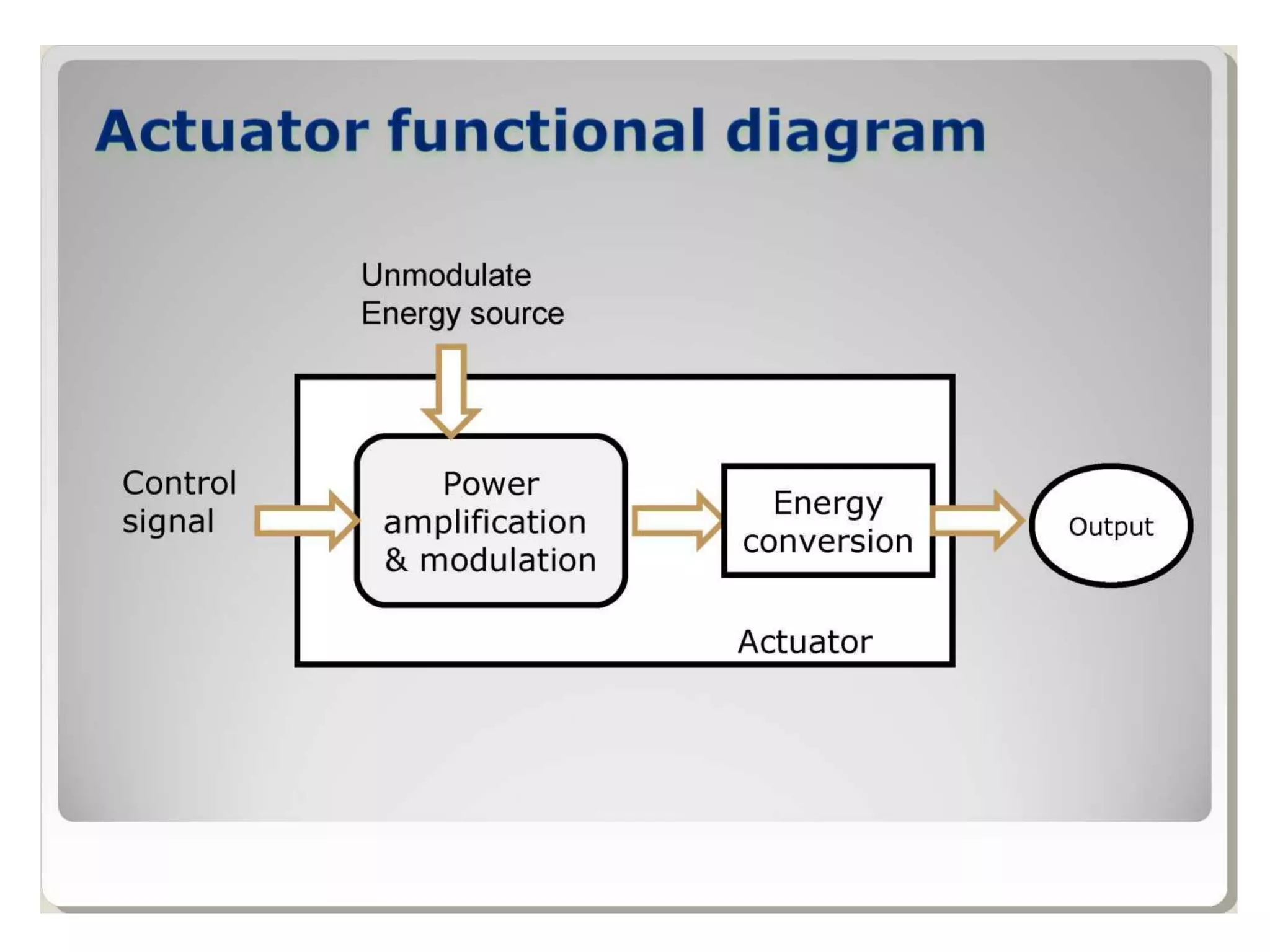
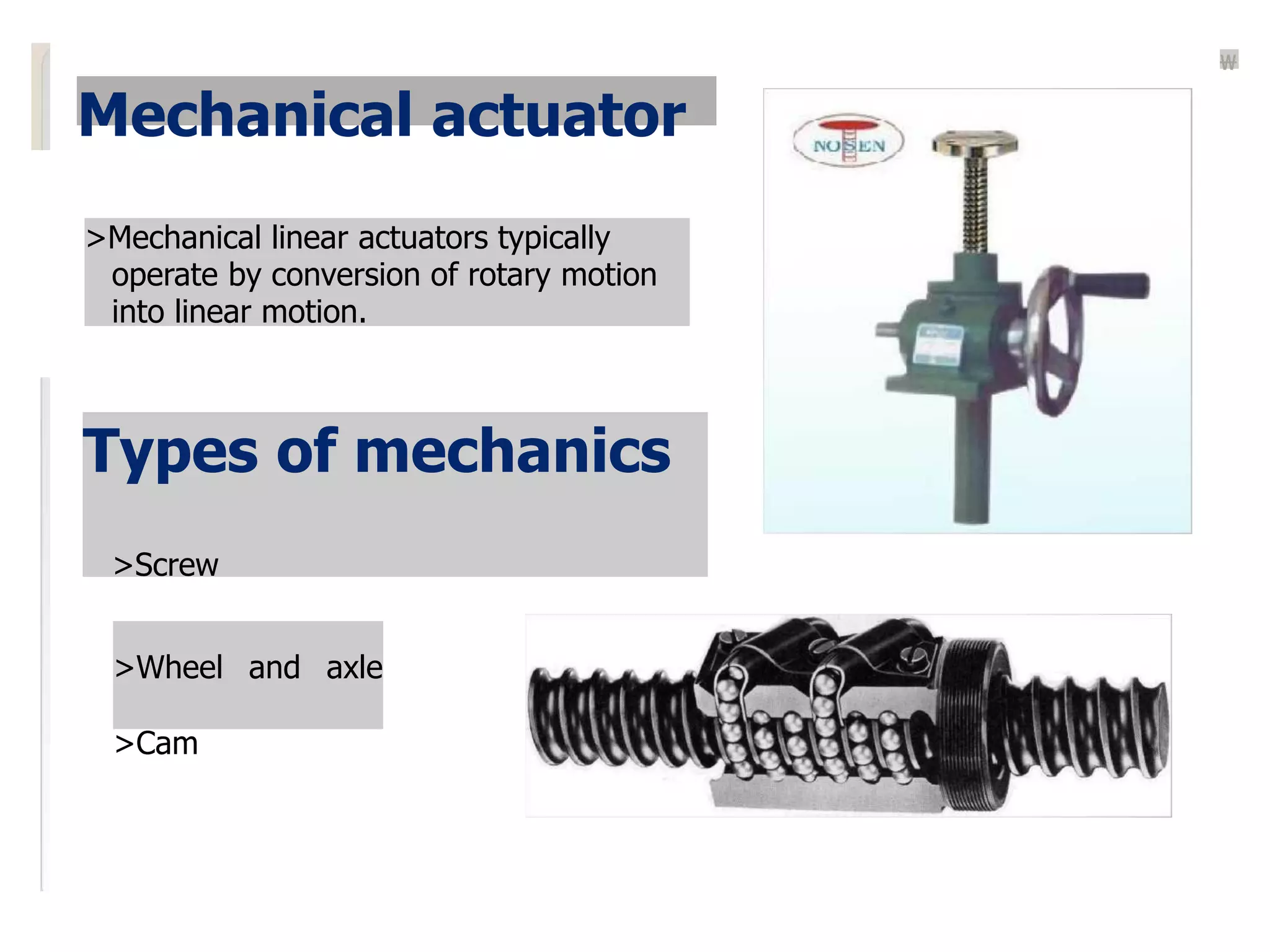
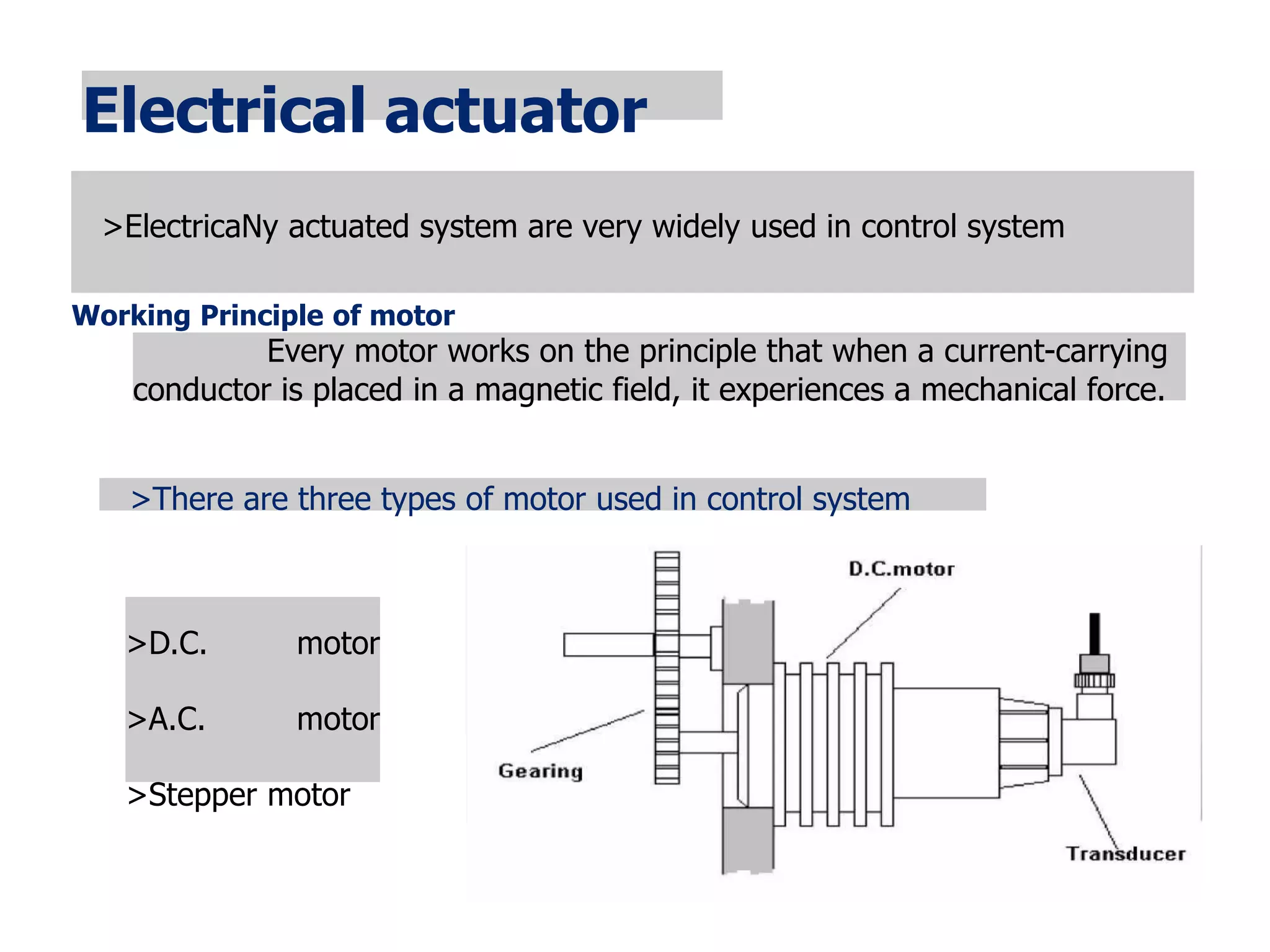
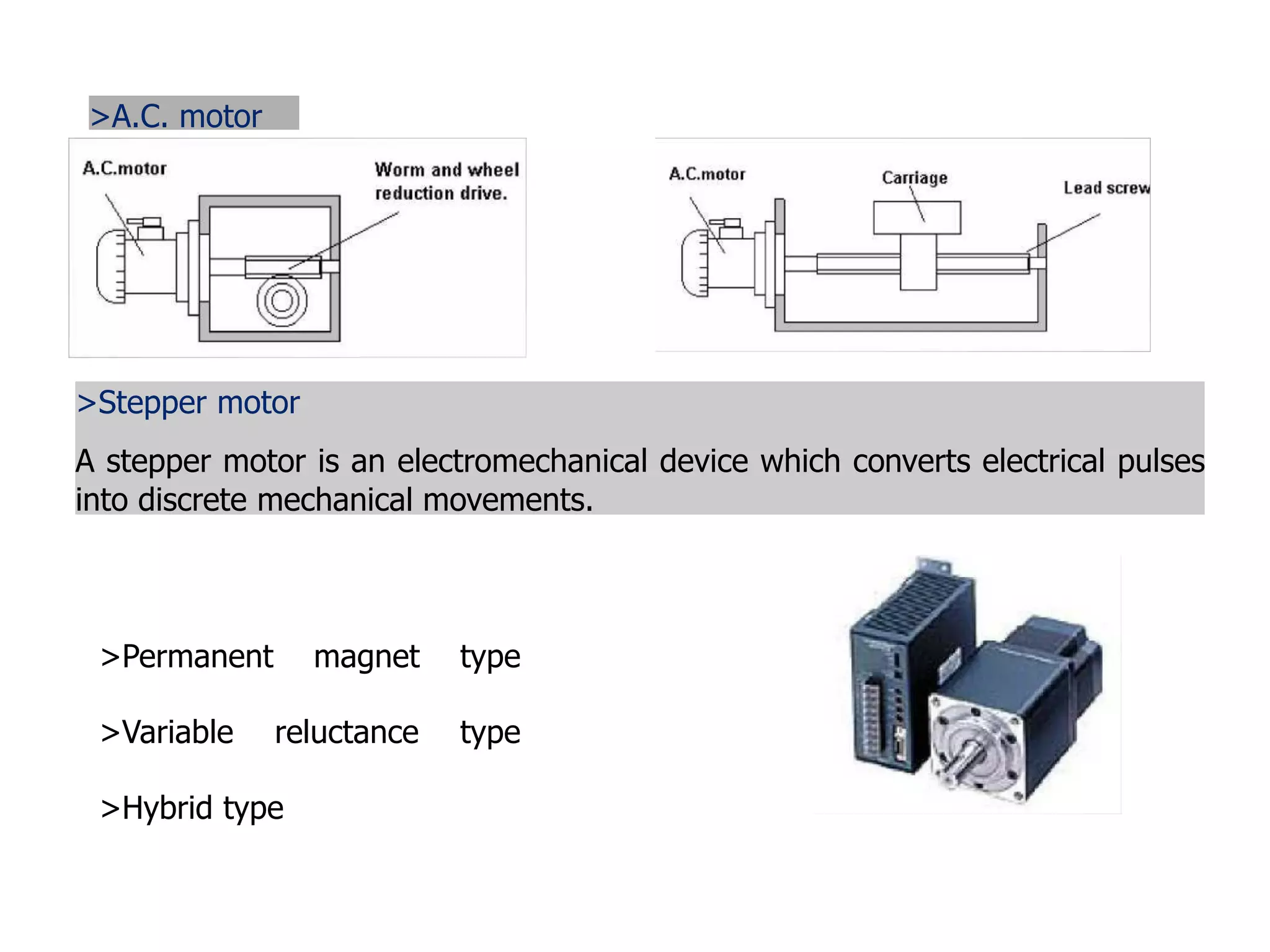
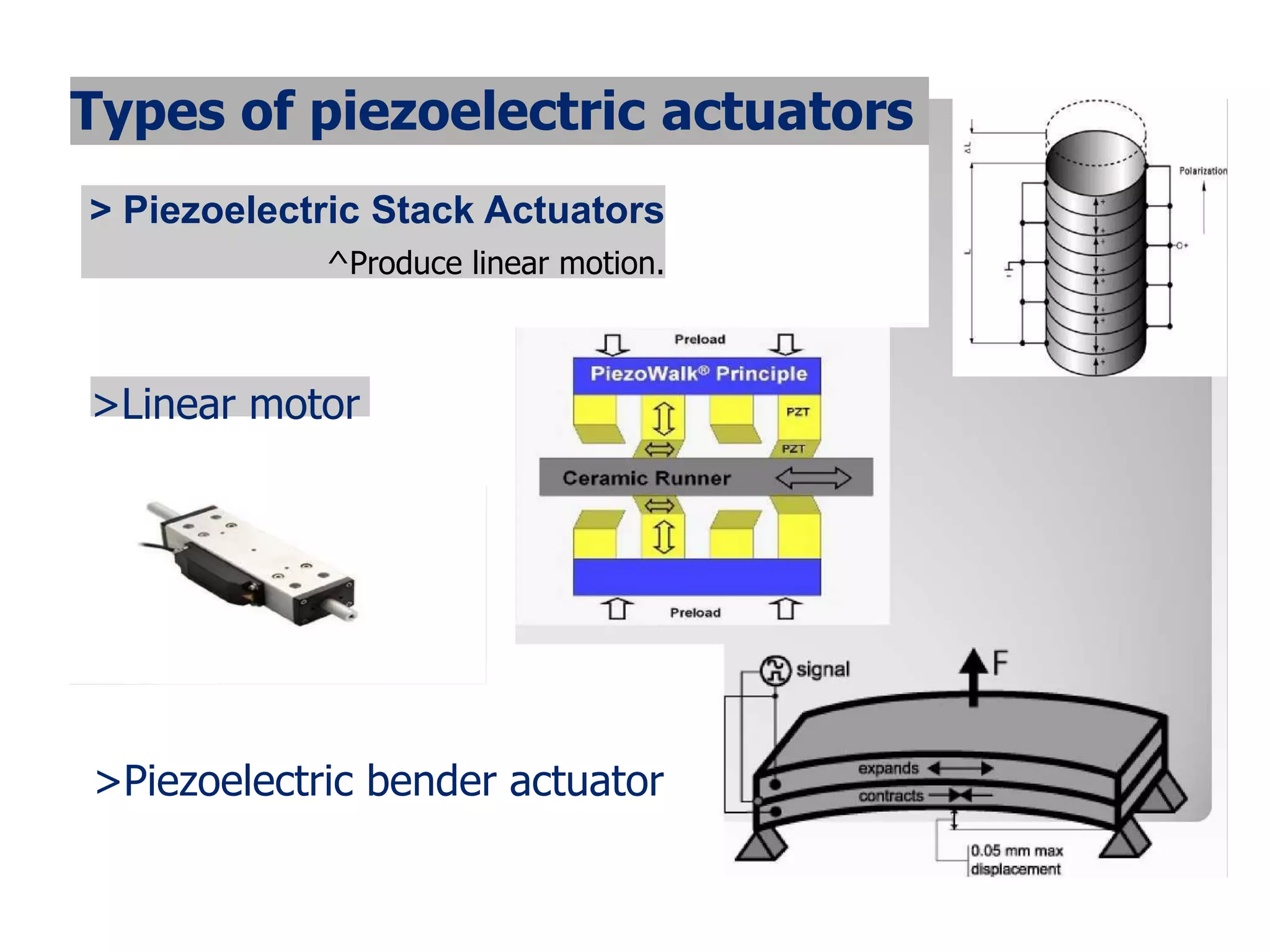
An actuator is a device that converts a control signal into mechanical motion. Actuators require a control signal and a source of energy. Common types of actuators include hydraulic, pneumatic, mechanical, electrical, and piezoelectric actuators. Actuators are used in a variety of applications such as industrial machinery, vehicles, medical devices, consumer electronics, and more. Stepper motors and servo motors are types of electrical actuators that provide precise motion control.