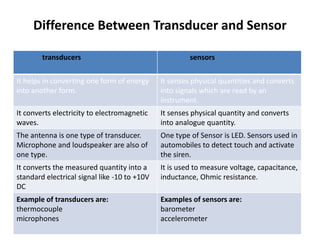
The document discusses sensors and transducers used in mechatronics systems. It defines sensors as devices that detect physical quantities and convert them into signals, while transducers convert one form of energy to another. The document outlines various types of commonly used sensors like potentiometers, strain gauges, and capacitive sensors. It describes the working principles, specifications, advantages, and applications of these sensors. The specifications discussed include range, sensitivity, accuracy, resolution, response time, which are important for mechatronics designers to understand the capabilities and limitations of different sensors.