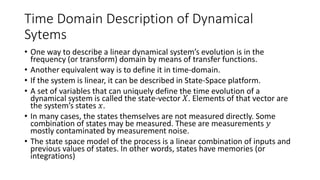
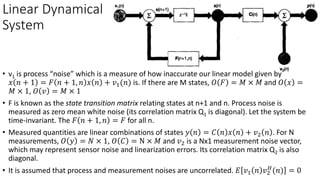
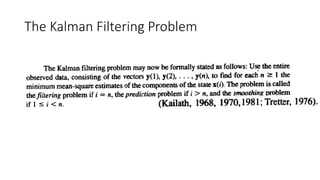
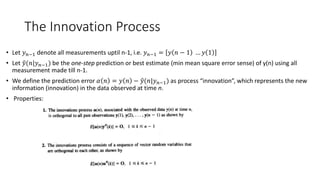
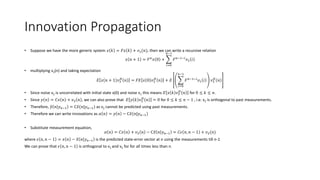
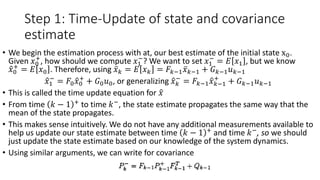
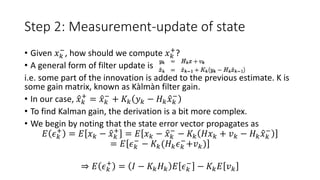
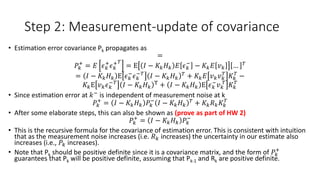
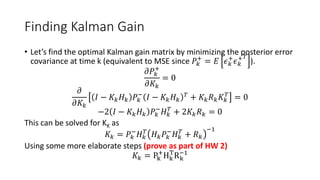
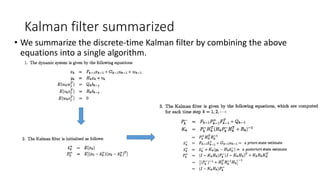
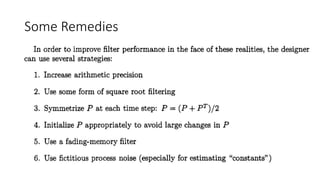
This document covers Kalman filters, emphasizing their optimal and recursive nature, discrete-time implementation, and state-space representation. It details the processes involved in state estimation, including time and measurement updates, innovation, and covariance propagation, alongside derivations and practical examples. The presentation also highlights the limitations and assumptions of Kalman filters when applied to real-world systems, including modeling errors and finite precision arithmetic.
![Av-738
Adaptive Filter Theory
Lecture 4- Optimum Filtering
[Kalman Filters]
Dr. Bilal A. Siddiqui
Air University (PAC Campus)
Spring 2018](https://image.slidesharecdn.com/av-738-aft-spr18-lecture04-optimumfilters-kalmanwk4-180216000008/85/Av-738-Adaptive-Filtering-Kalman-Filters-1-320.jpg)
![Av-738
Adaptive Filter Theory
Lecture 4- Optimum Filtering
[Kalman Filters]
Dr. Bilal A. Siddiqui
Air University (PAC Campus)
Spring 2018](https://image.slidesharecdn.com/av-738-aft-spr18-lecture04-optimumfilters-kalmanwk4-180216000008/75/Av-738-Adaptive-Filtering-Kalman-Filters-1-2048.jpg)
![Kalman Filters
• Kalman filter is both an optimal and recursive (adaptive filter)
• It has a unique mathematical formulation (i.e. state space concepts)
• It is solved recursively. It is updated using previous state estimates and
new data (innovation), therefore no need for storage.
• It is mostly implemented in the discrete form, and easily implementable
on digital computers
• It gives a unifying framework for RLS filters.
• Developed by Rudolf Kalman in 1969 []](https://image.slidesharecdn.com/av-738-aft-spr18-lecture04-optimumfilters-kalmanwk4-180216000008/85/Av-738-Adaptive-Filtering-Kalman-Filters-2-320.jpg)
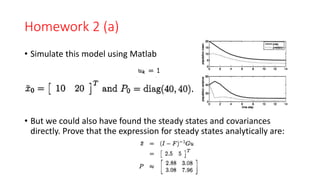

![Simulation
%%
clc;clear all;close;
%Kalman filter for position measurement
%AV-738 Spr 18, Dr. Bilal A. Siddiqui
T=5;
R=30^2;
a=0.01;
F=[1 T T^2/2 %position
0 1 T %velocity
0 0 1]; %acceleration
G=0;
H=[0 0 1];% only position being measured
w=0;%process noise
x(:,1)=[0 0 a]';%initial value of state vector
x_post(:,1)=[0 0 0]';%initial estimate of state
vector
P_post(:,:,1)=1E5*eye(3);%initial estimate of error
covariance
for k=2:60
%calculate a priori covariance estimate
P_prior(:,:,k)=F*P_post(:,:,k-1)*F';
%calculate Kalman gain
K(:,:,k)=P_prior(:,:,k)*H'*(H*P_prior(:,:,k)*H'+R)^-1;
%calculate a priori estimate of state
x_prior(:,k)=F*x(:,k-1);
%system evolution
x(:,k)=F*x(:,k-1);%take measurement
y(k)=H*x(:,k)+sqrt(R)*randn;
%calculate innovation
innov(k)=y(k)-H*x_prior(:,k);
%calculate a posteriori estimate of state
x_post(:,k)=x_prior(:,k)+K(:,:,k)*innov(k);
%calculate a posteriori estimate of covariance
P_post(:,:,k)=(eye(3)- ...
K(:,:,k)*H)*P_prior(:,:,k)*+(eye(3)-K(:,:,k)*H)'+...
K(:,:,k)*R*K(:,:,k)';
end](https://image.slidesharecdn.com/av-738-aft-spr18-lecture04-optimumfilters-kalmanwk4-180216000008/85/Av-738-Adaptive-Filtering-Kalman-Filters-25-320.jpg)











































![Sensor Fusion Study - Ch9. Optimal Smoothing [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/optimalsmoothing-200815074615-thumbnail.jpg?width=640&height=640&fit=bounds)


![Av 738- Adaptive Filtering - Wiener Filters[wk 3]](https://cdn.slidesharecdn.com/ss_thumbnails/av-738-aft-spr18-lecture03-optimumfilters-weinerwk3-180215235757-thumbnail.jpg?width=640&height=640&fit=bounds)













![ME 312 Mechanical Machine Design [Screws, Bolts, Nuts]](https://cdn.slidesharecdn.com/ss_thumbnails/me312-dsulec10-screws-170213050612-thumbnail.jpg?width=640&height=640&fit=bounds)
![ME 312 Mechanical Machine Design - Introduction [Week 1]](https://cdn.slidesharecdn.com/ss_thumbnails/me312-dsulec01-170213050149-thumbnail.jpg?width=640&height=640&fit=bounds)






















