Download to read offline
![The plant state equation and output equation are
x(k+1) = G x(k) + H u(k) (1)
y(k) = C x(k) (2)
where, number of inputs r = number of outputs m
G is nxn matrix, H is nxm matrix and C is mxn matrix
From this figure we get that
u(k) = K1 v(k) - K2 x(k) (3)
where K2 is the state feedback gain matrix and K1 is the forward loop integrator gains.
The inputs to the integrators e(k) and the outputs v(k) are related by
v(k+1) = e(k) + v(k)
= v(k) + r(k) – y(k) (4)
= v(k) – C x(k) + r(k) (5)
In what follows we shall show how to choose the gain matrices K1 and K2 so as to
locate the combined (n+m) closed loop poles of the system shown in Figure to desired
locations. Note, the combined system shown in Fig. has n state of the original system
eqn. (1) as well as an additional m state introduced due the added m integrators. Next,
let us write the state equation of the combined state x(k) and v(k) in order to use it for
pole placement.
Substituting for the expression of u(k) of eqn. (3) into eqn. (1), we get
x(k+1) = G x(k) – H K2 x(k) + H K1 v(k) (6)
and from (5), we have
v(k+1) = v(k) – C x(k) + r(k)
The equation of the combined state of the servo system, x(k) and v(k) in matrix form
will be
[
𝑥(𝑘 + 1)
𝑣(𝑘 + 1)
]= [
𝐺 − 𝐻 𝐾2 𝐻 𝐾 1
−C 𝐼 𝑚
] [
𝑥(𝑘)
𝑣(𝑘)
] + [
0
𝐼 𝑚
] r(k) (7)](https://image.slidesharecdn.com/servo-systems-200826113030/85/Servo-systems-2-320.jpg)
![y(k) = [ C : 0 𝑚 ] [
𝑥(𝑘)
𝑣(𝑘)
] (8)
This is the state equation of the servo system shown in Fig. and it remains to select the
state feedback matrix gain K2 of dimension (mxn) and the integrator gains matrix K1 of
dimension (mxm) so as to locate the (n+m) closed loop poles to the inside of the unit
circle. Im stands for the identity matrix of dimension mxm. At steady state
x(k+1) = x(k) = xss
u(k+1) = u(k) = uss
v(k+1) = v(k) = vss
and y(k+1) = y(k) = yss
Thus, it follows from eqn. (4)
vss = vss + r - yss
and hence the steady state value of the outputs will equal the corresponding input for
unit step inputs. We can get the steady state of x(k) and v(k) from eqn. (7).
To find the gain matrices K1 and K2 , let us rewrite eqn. (7) in the form
[
𝑥(𝑘 + 1)
𝑣(𝑘 + 1)
]=[
𝐺 0
−C 𝐼 𝑚
] [
𝑥(𝑘)
𝑣(𝑘)
] + [
0
𝐼 𝑚
] r(k) - [
𝐻 𝐾2 −𝐻𝐾1
0 0
] [
𝑥(𝑘)
𝑣(𝑘)
] (9)
= [
𝐺 0
−C 𝐼 𝑚
] [
𝑥(𝑘)
𝑣(𝑘)
] + [
0
𝐼 𝑚
] r(k) – [
𝐻
0
] [𝐾2 −𝐾1] [
𝑥(𝑘)
𝑣(𝑘)
] (10)
The last term in eqn. (10) represents the combined state feedback gain matrix
[𝐾2 −𝐾1]. We can write equation (10) in the form
𝑥 𝑎(𝑘 + 1) = 𝐺 𝑎 𝑥 𝑎(𝑘) − 𝐻 𝑎 𝐾𝑎 𝑥 𝑎(𝑘) + [
0
𝐼 𝑚
] r(k), and 𝑥 𝑎(𝑘) = [
𝑥(𝑘)
𝑣(𝑘)
] (11)
where 𝐺 𝑎 = [
𝐺 0
−C 𝐼 𝑚
], 𝐻 𝑎 = [
𝐻
0
] and 𝐾𝑎 = [𝐾2 −𝐾1] (12)
and 0 represents a zero matrix with the appropriate dimension so as to make the 𝐺 𝑎
matrix to be (n+m)x(n+m) square matrix while the 𝐻 𝑎 is of dimension mx(n+m).](https://image.slidesharecdn.com/servo-systems-200826113030/85/Servo-systems-3-320.jpg)
![To summarize what we have done, we find the integrators gains K1 and the state
feedback gain matrix K2 so as to locate the (n+m) closed loop poles through the
following steps:
1- Construct the matrices 𝐺 𝑎 and 𝐻 𝑎 of the augmented system as
𝐺 𝑎 = [
𝐺 0
−C 𝐼 𝑚
], 𝐻 𝑎 = [
𝐻
0
]
2- Find the state feedback gain matrix 𝐾𝑎 corresponding to 𝐺 𝑎 and 𝐻 𝑎 .
3- Determine the state feedback gain matrix 𝐾2 the integrators gain matrix 𝐾1 from
eqn. (12) 𝐾𝑎 = [𝐾2 −𝐾1]
It worth mentioning that the pair (Ga , Ha) is controllable.
The following example will illustrate these steps.
Example. Given the system described by
𝑌(𝑧)
𝑋(𝑧)
=
𝑧−2+0.5 𝑧−3
1− 𝑧−1+0.01 𝑧−2+0.12 𝑧−3
Determine the integral gain constant K1 and the state feedback gain matrix K2 so as to locate the
closed loop poles at z1,2 = 0.3 + 0.4 j and z3,4= 0.
Solution:- The standard controllable form representation of the transfer function is
𝑥(𝑘 + 1) = [
0 1 0
0 0 1
−0.12 −0.01 1
] 𝑥(𝑘) + [
0
0
1
] 𝑢(𝑘), 𝑦(𝑘) = [0.5 1 0]𝑥(𝑘)
Where n = 3 and m =1
The servo system matrices G^
and H^
are given by
𝐺 𝑎 = [
𝐺 0
−C 𝐼 𝑚
] = [
0 1 0 0
0 0 1 0
−0.12 −0.01 1 0
−0.5 −1 0 1
] and 𝐻 𝑎 = [
𝐻
0
] = [
0
0
1
0
]
The closed loop characteristic equation of the designed system is given by](https://image.slidesharecdn.com/servo-systems-200826113030/85/Servo-systems-4-320.jpg)
![Φ(z) = z2
(z2
-0.6 z +0.25)
The controllability matrix of the pair (Ga, Ha
^
) = CONA = [
0 0 1 1
0 1 1 0.99
1 1 0.99 0.86
0 0 −1 −2.5
]
The inverse of the controllability matrix is given by
CONA-1
= [
−0.07 −1 1 −0.08
−1.0067 1 0 −0.0067
1.6667 0 0 0.6667
−0.6667 0 0 −0.6667
] ➔ 𝑓4= [−0.6667 0 0 −0.6667]
Note, we could deduce 𝑓4 from 𝑓4 ∗ 𝐶𝑂𝑁́ = [0 0 0 1]
Therefore, the inverse of the transformation to the standard controllable form is given by
Pa
-1
=
[
𝑓4
𝑓4 𝐺 𝑎
𝑓4 𝐺 𝑎
2
𝑓4 𝐺 𝑎
3
]
= [
−0.6667 0 0 −0.6667
0.3333 0 0 −0.6667
0.3333 1 0 −0.6667
0.3333 1 1 −0.6667
] and Pa = [
−1 1 0 0
0 −1 1 0
0 0 −1 1
−0.5 −1 0 0
]
And 𝐺 𝑎
^
= 𝑃𝑎
−1
𝐺 𝑎 𝑃𝑎 = [
0 1 0 0
0 0 1 0
0 0 0 1
0.12 −0.11 −1.01 2
] , 𝐻 𝑎
^
= [
0
0
0
1
]
Therefore Ka = [(∝4− 𝑎4) (∝3− 𝑎3) (∝2− 𝑎2) (∝1− 𝑎1)] 𝑃𝑎
−1
Ka = [ 0.12 -0.11 (0.25-1.01) (-0.6+2)] = [
−0.6667 0 0 −0.6667
0.3333 0 0 −0.6667
0.3333 1 0 −0.6667
0.3333 1 1 −0.6667
]
= [0.0966 0.64 1.4 -0.433]
K2 = [ 0.0966 0.64 1.4 ] and K1 = 0.433
To find the step response of this system, we have to use the augmented state equation](https://image.slidesharecdn.com/servo-systems-200826113030/85/Servo-systems-5-320.jpg)
![[
𝑥(𝑘 + 1)
𝑣(𝑘 + 1)
] = [
𝐺 − 𝐻 𝐾2 𝐻 𝐾 1
−C 𝐼 𝑚
] [
𝑥(𝑘)
𝑣(𝑘)
] + [
0
𝐼 𝑚
] r(k)
and the output equation
y(k) = [ C : 0 ] [
𝑥(𝑘)
𝑣(𝑘)
]
Substituting for G, H, C, K1 and K2 , we get
[
𝑥(𝑘 + 1)
𝑣(𝑘 + 1)
] = [
0 1 0 0
0 0 1 0
−0.2167 −0.65 −0.4 0.4333
−0.5 −1 0 1
] [
𝑥(𝑘)
𝑣(𝑘)
] + [
0
0
0
1
] r(k)
y(k) = [0.5 1 0 0] [
𝑥(𝑘)
𝑢(𝑘)
]
Assuming zero initial conditions for all the state, the computed output step response is
y = [ 0 0 0 0.43 0.91 1.087 1.075 1.023 0.995 0.991 0.996 0.9997 1.00086
1.00057 1.00012 0.9999 0.9999 0.99997 1.00 1.00 1.00 ]
Note : you can use the MATLAB eig function to check the eigenvalues (poles) of the servo-
system eig([
0 1 0 0
0 0 1 0
−0.2167 −0.65 −0.4 0.4333
−0.5 −1 0 1
])](https://image.slidesharecdn.com/servo-systems-200826113030/85/Servo-systems-6-320.jpg)


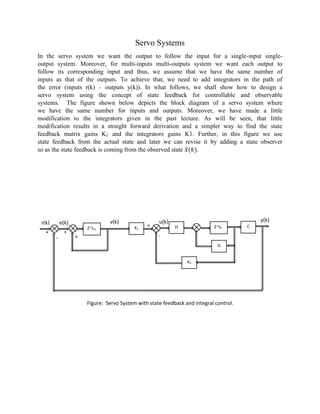
This document describes the design of a servo system using state feedback and integral control. It defines the plant state and output equations, and shows the block diagram of the servo system. The state equation of the augmented system is derived, combining the plant states and integrator states. The gains K1 and K2 are selected using pole placement so that the closed-loop poles of the combined system are located at the desired locations. An example is provided to illustrate the design process.















































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)





