Download to read offline
![5-2. Kalman Filter Properties
We want to find a causal filter that results in a state estimate 𝑥 𝑘
Error between true state and estimated state 𝑥 𝑘 = 𝑥 𝑘 − 𝑥 𝑘
Objective -> min 𝐸[𝑥 𝑘
𝑇
𝑆 𝑘 𝑥 𝑘] (minimize weighted two-norm)
(S is a positive definite user-defined weighting matrix)
-> optimal linear filter in any case](https://image.slidesharecdn.com/ch5-200712161939/75/Sensor-Fusion-Study-Ch5-The-discrete-time-Kalman-filter-11-2048.jpg)
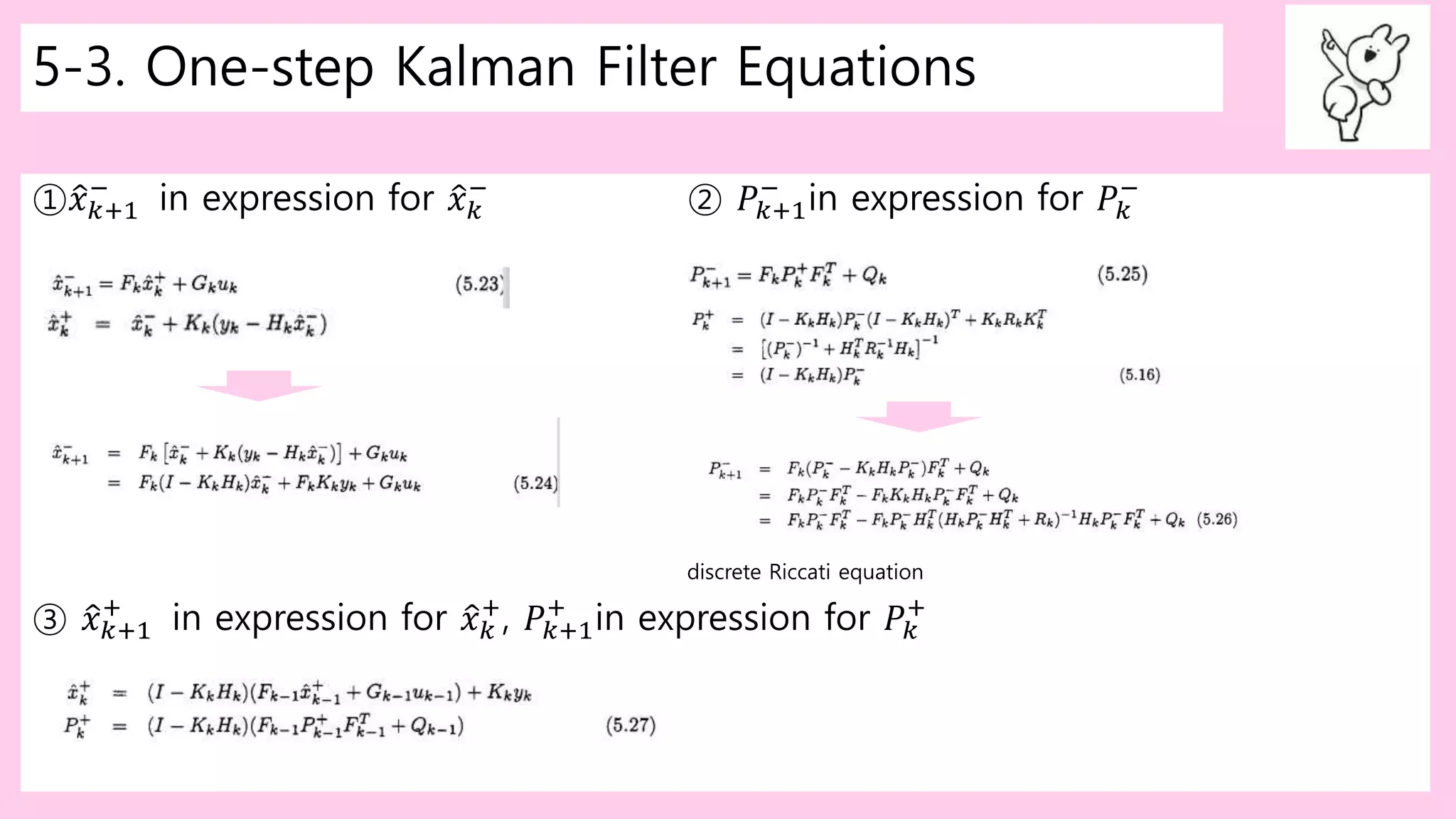
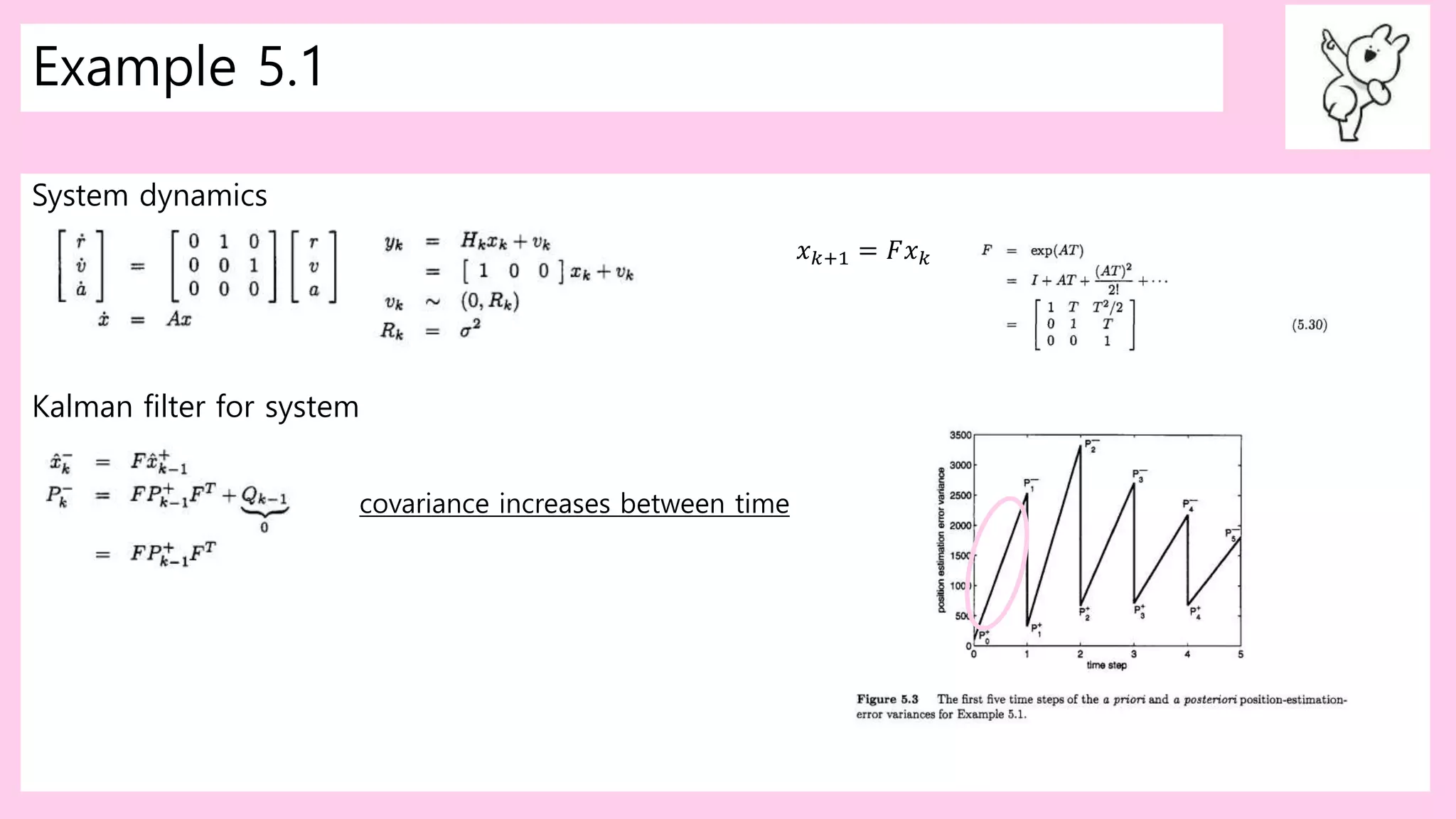

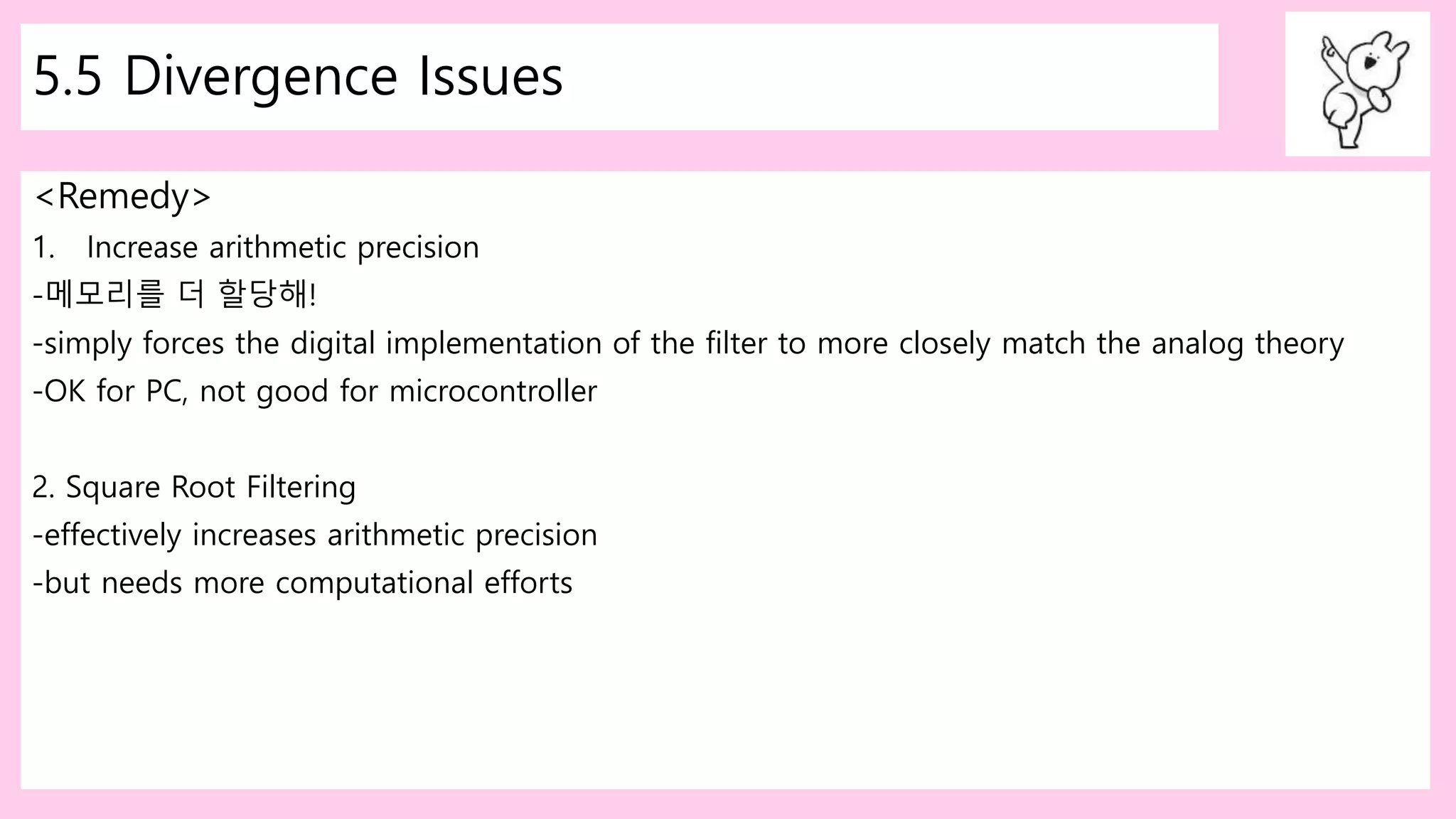
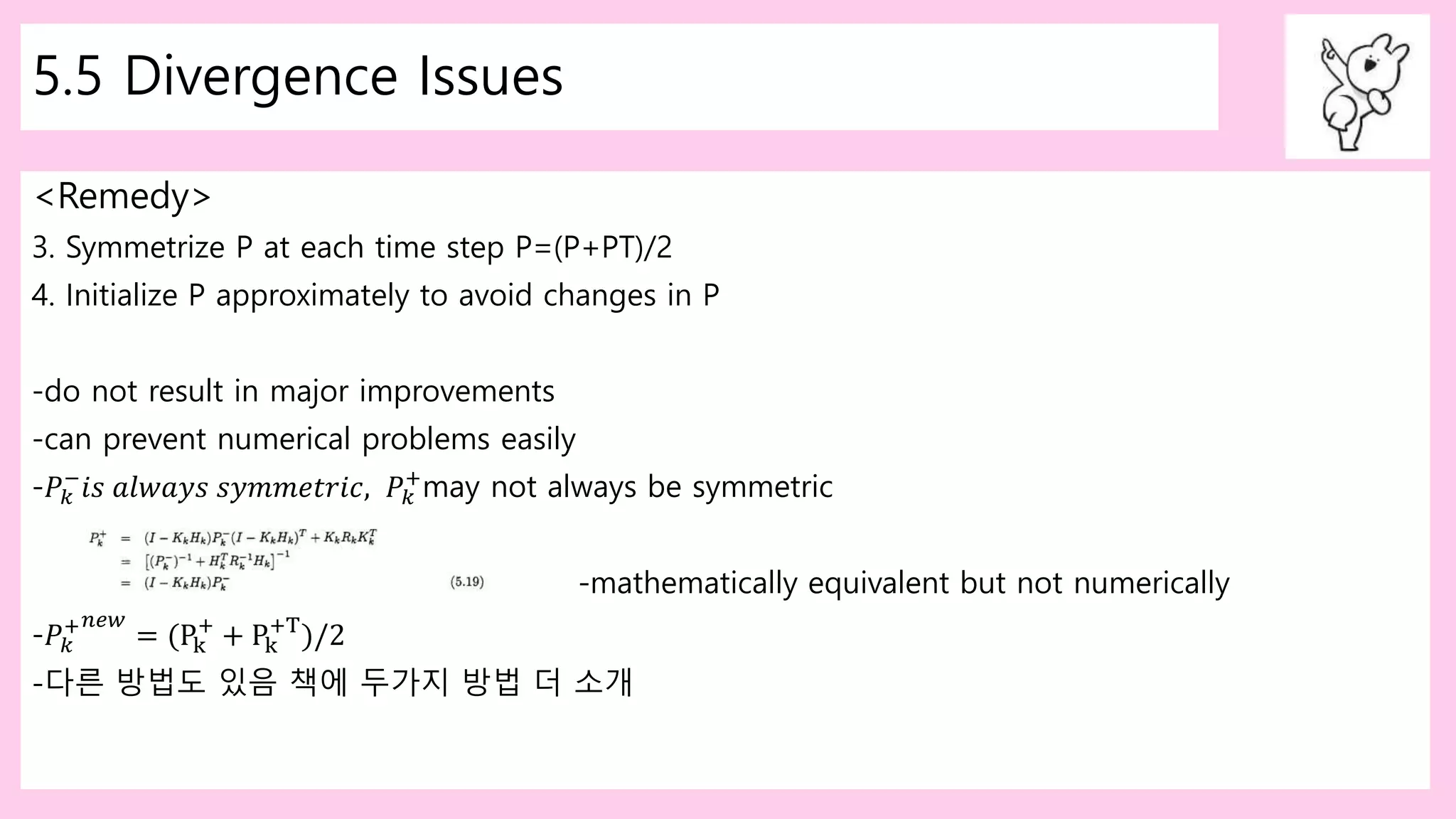
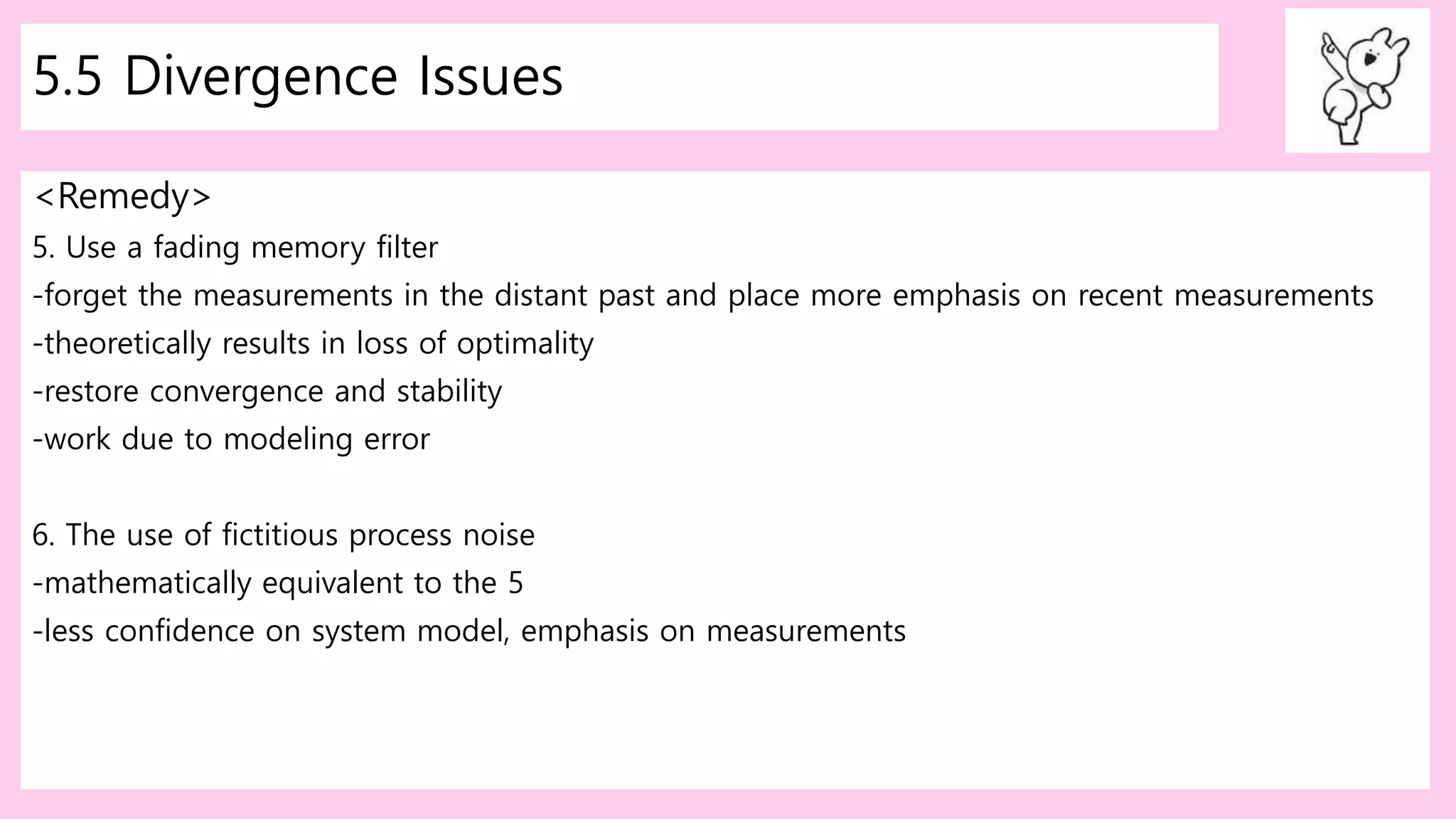
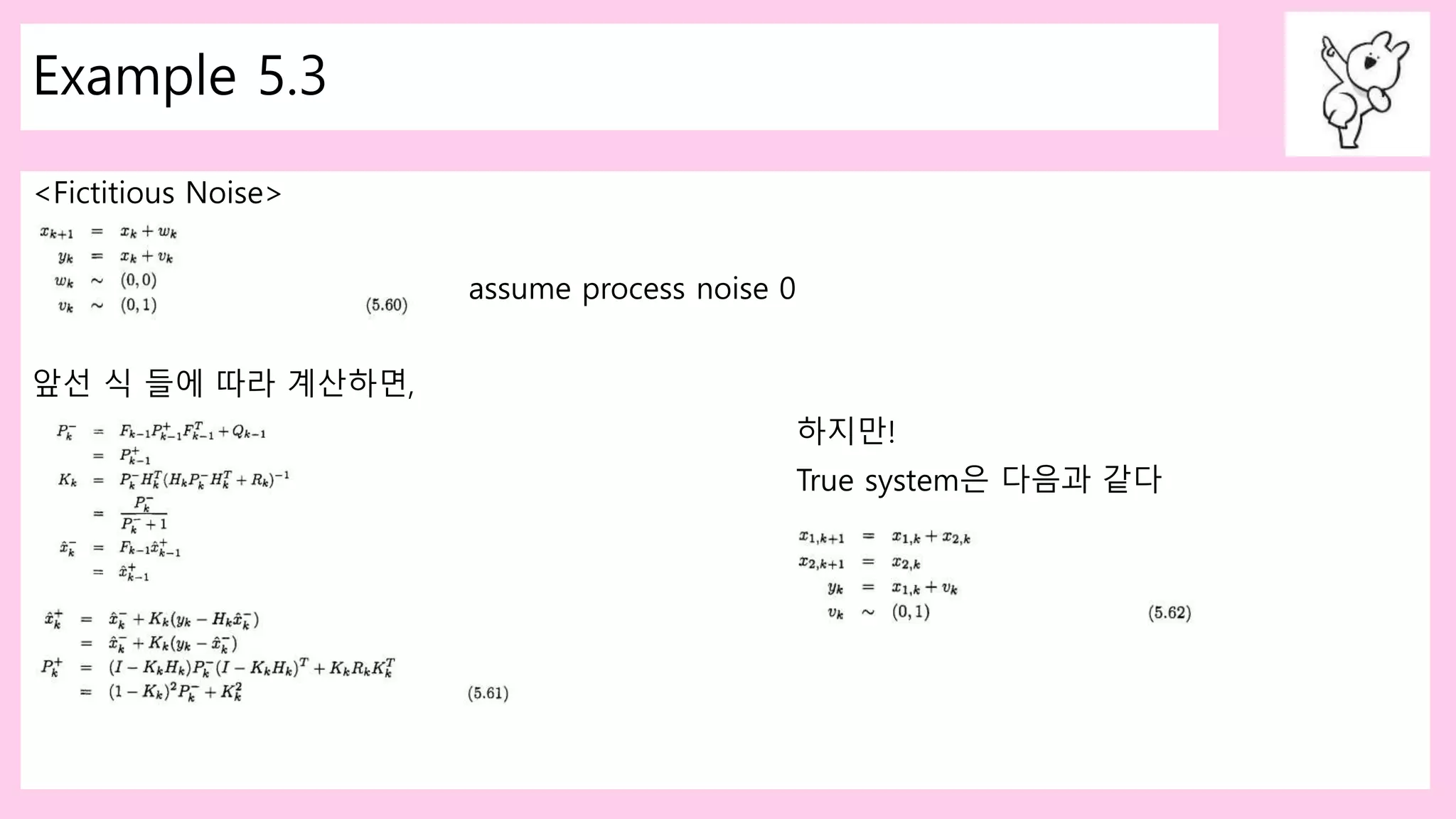
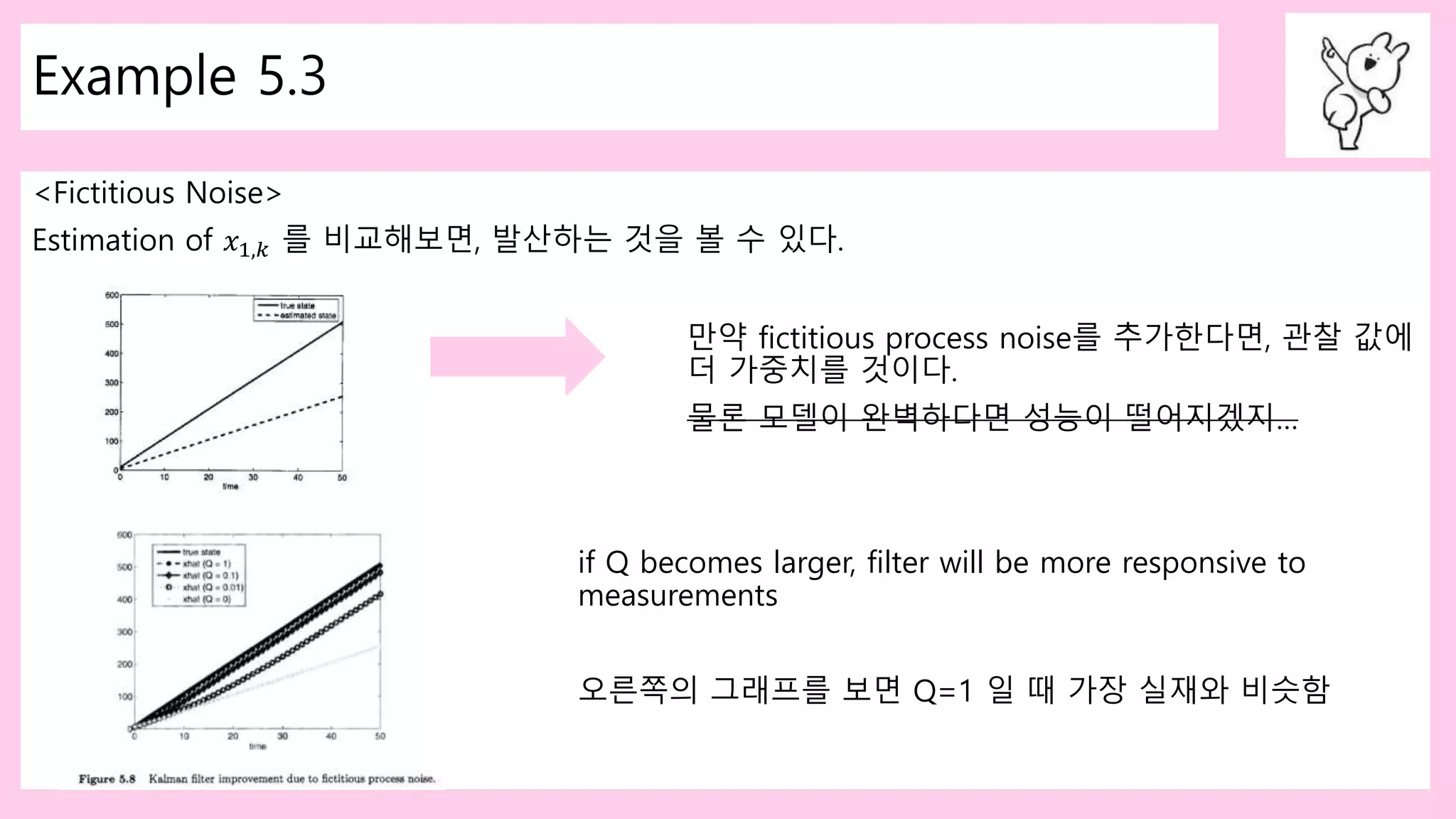
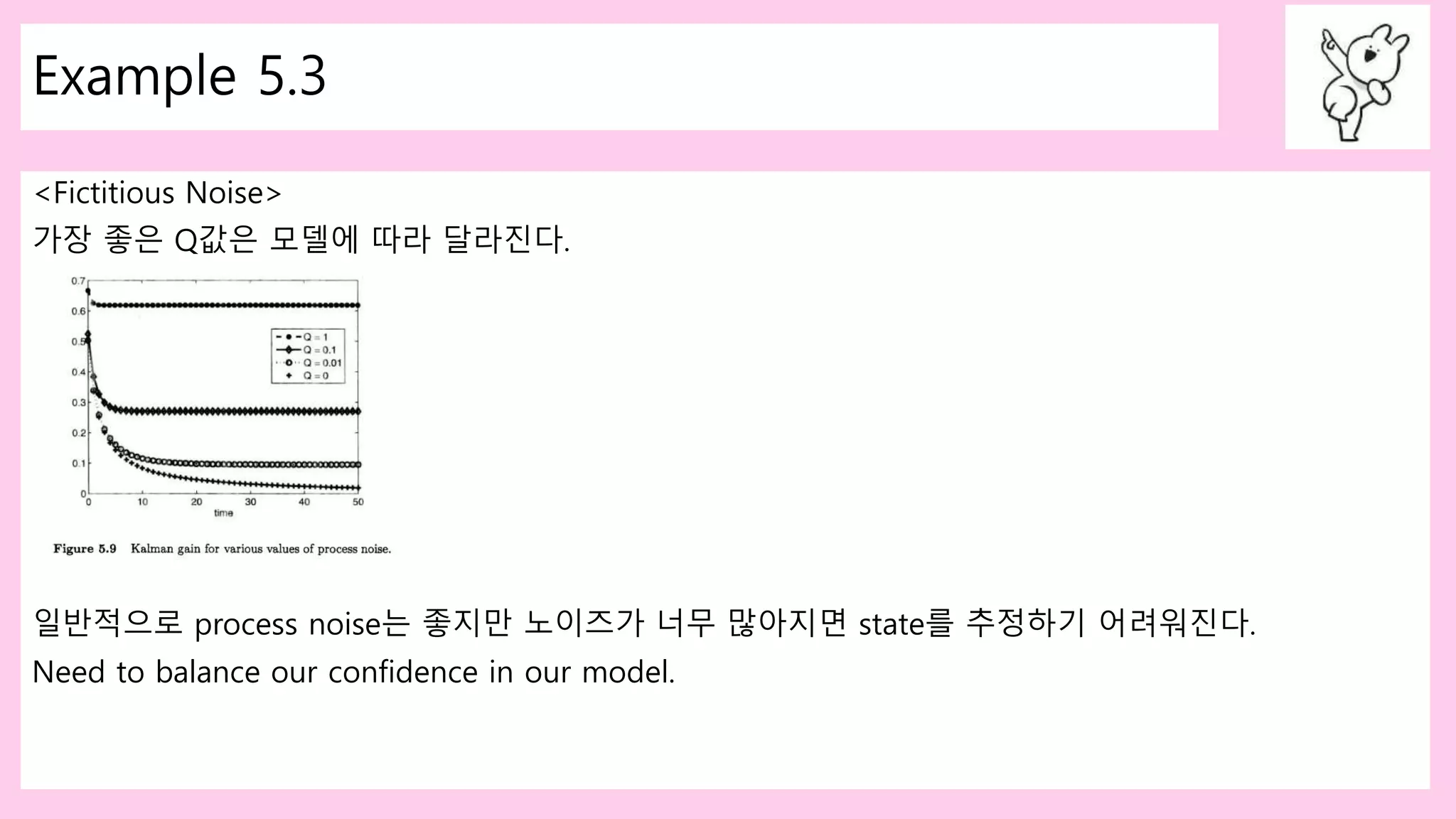
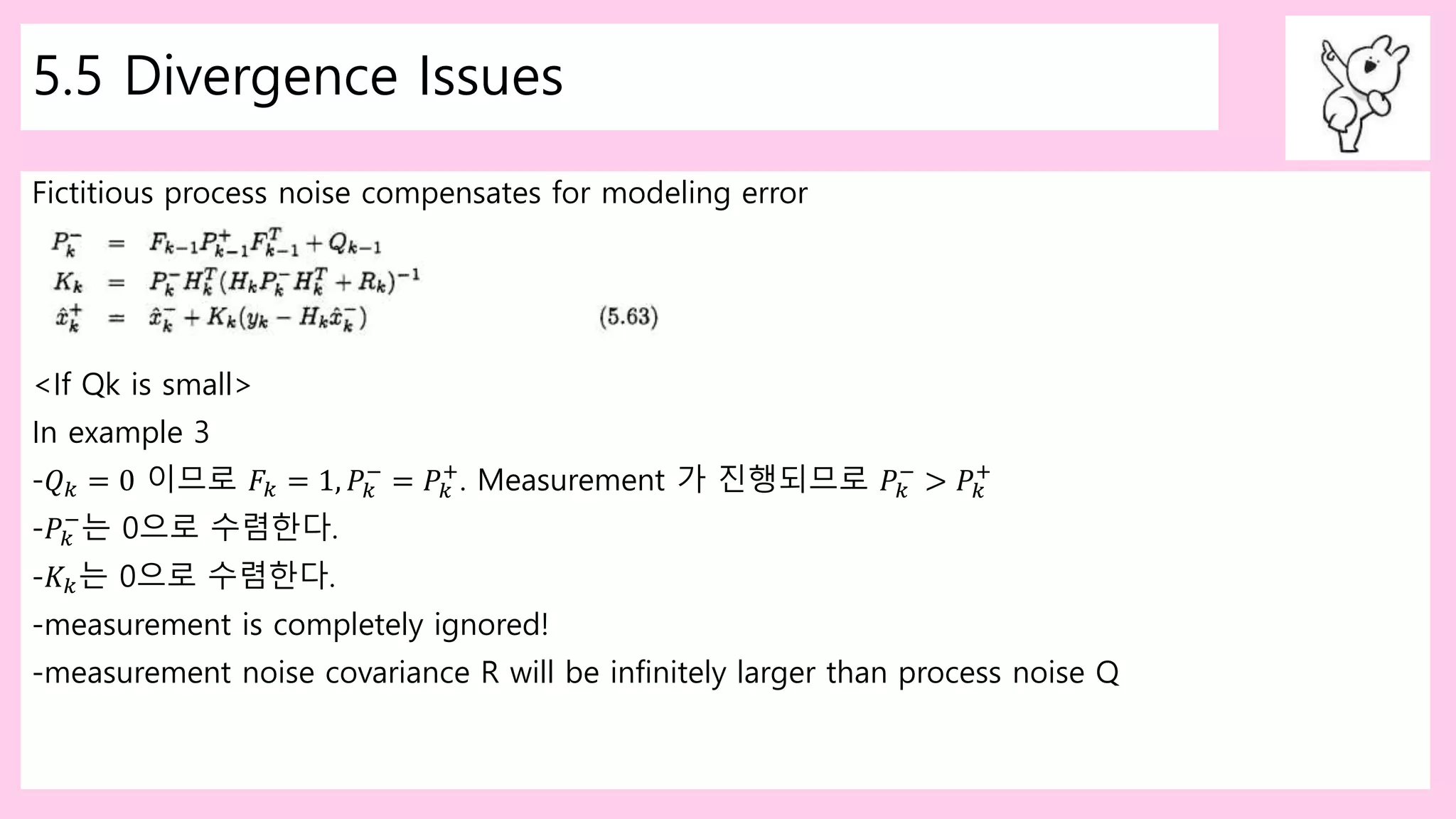
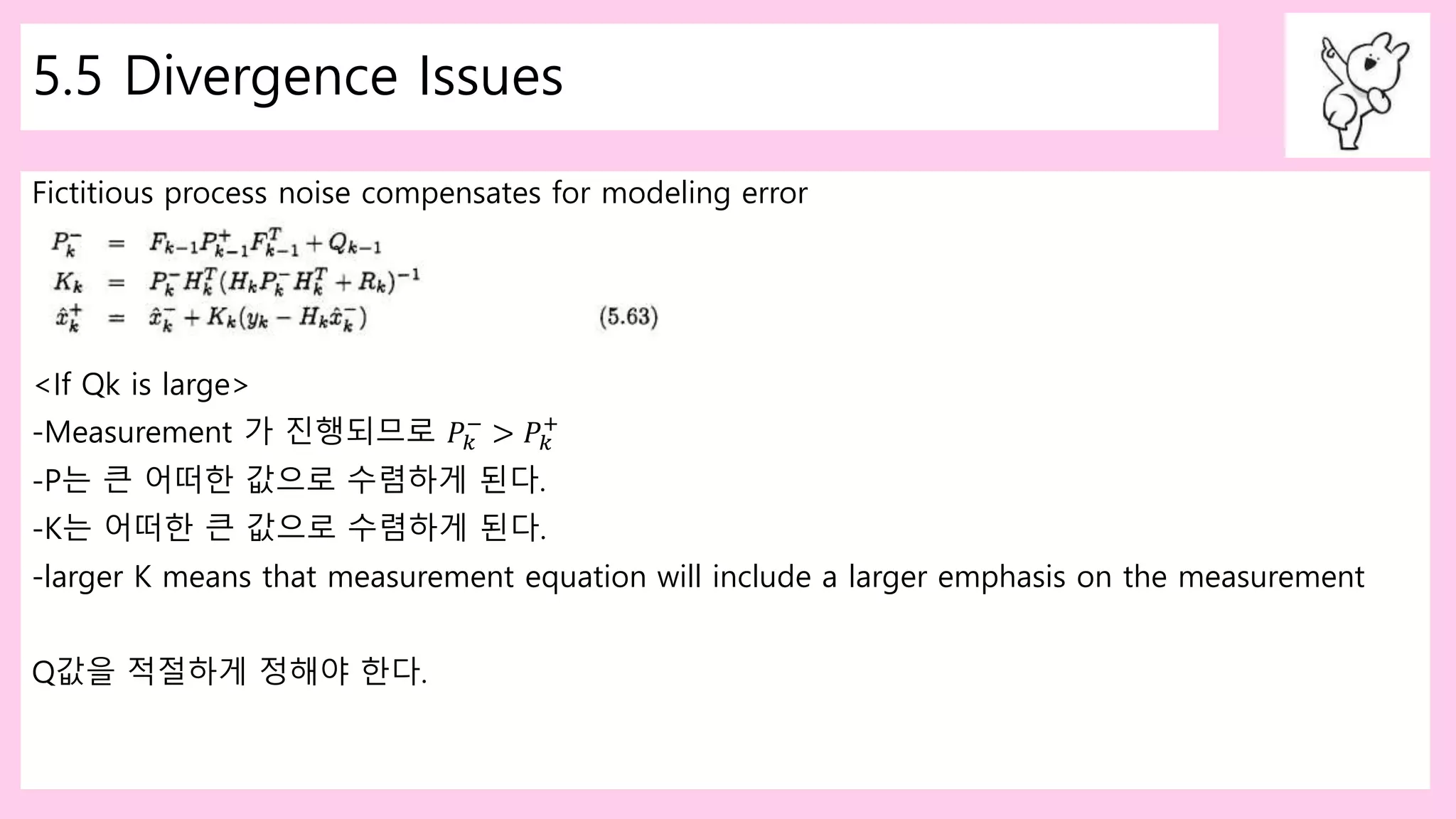

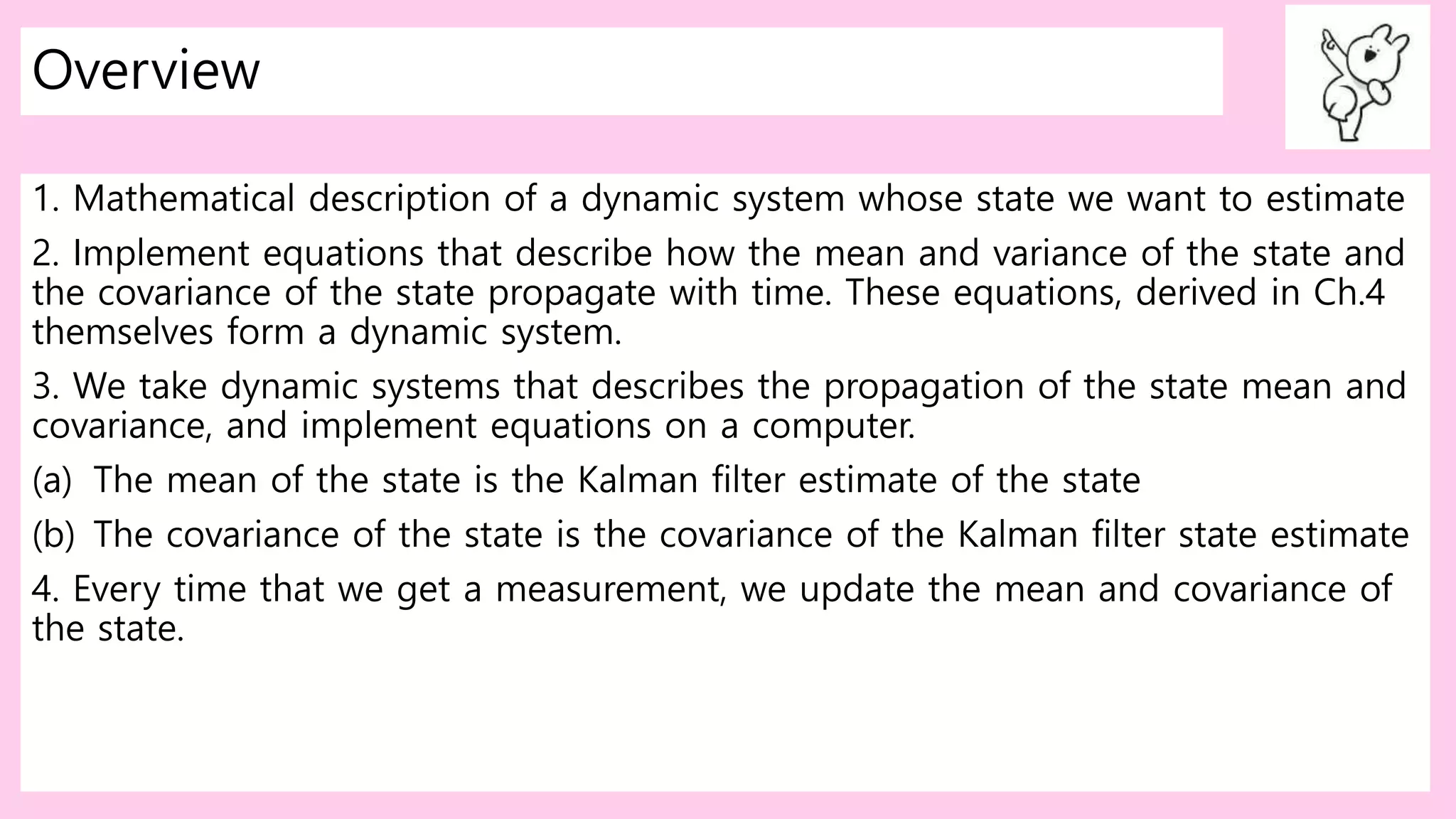
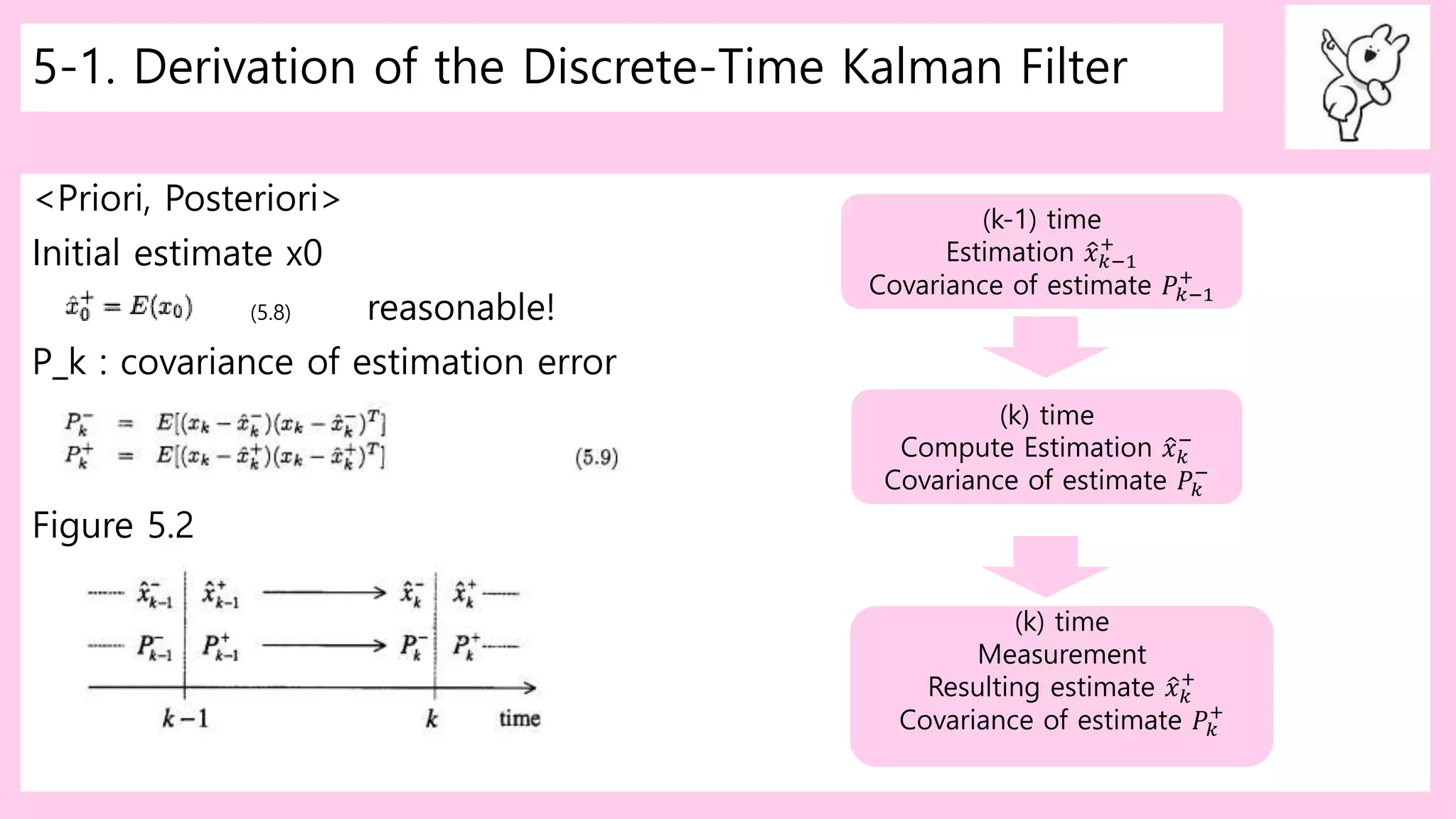
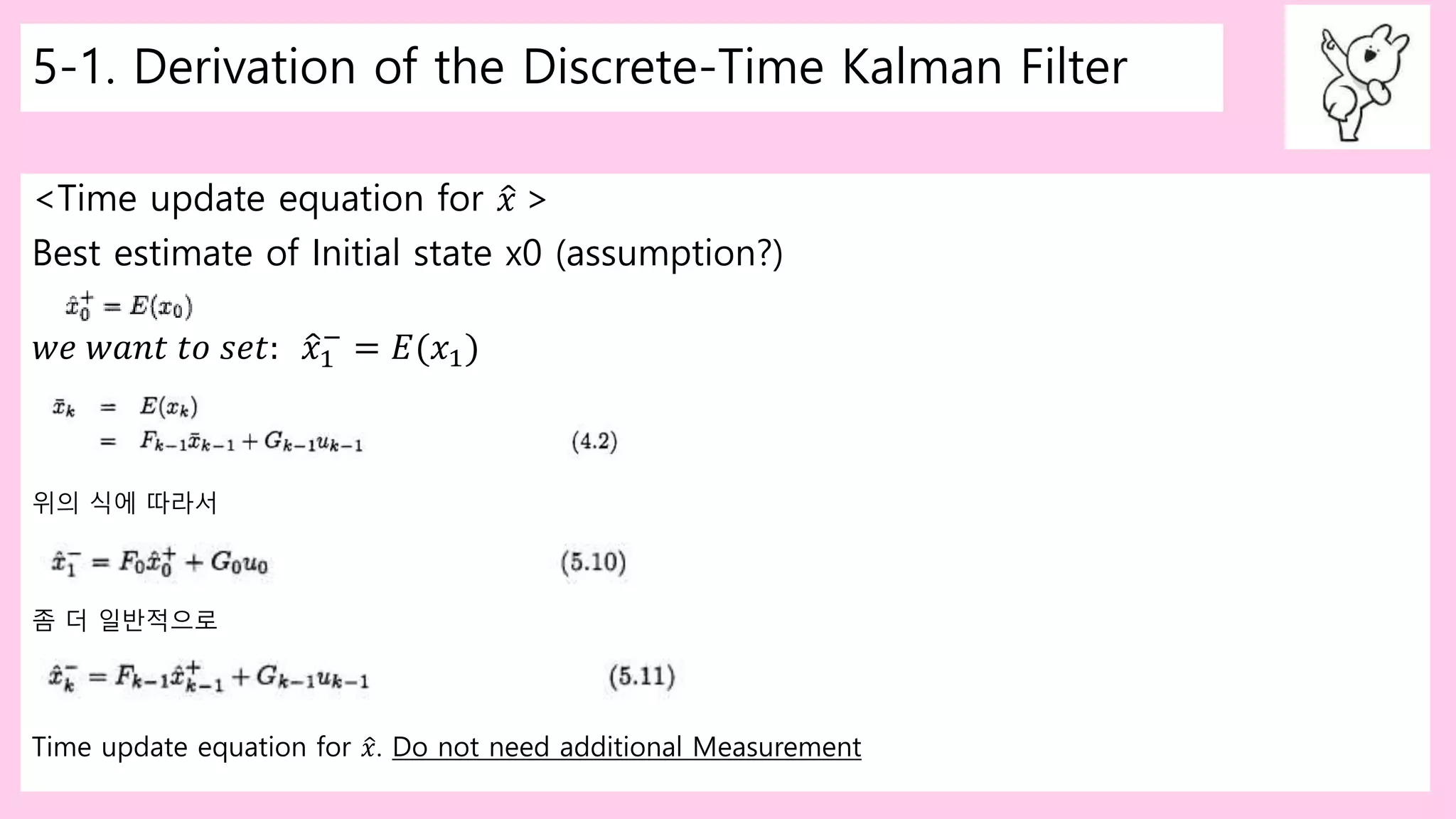
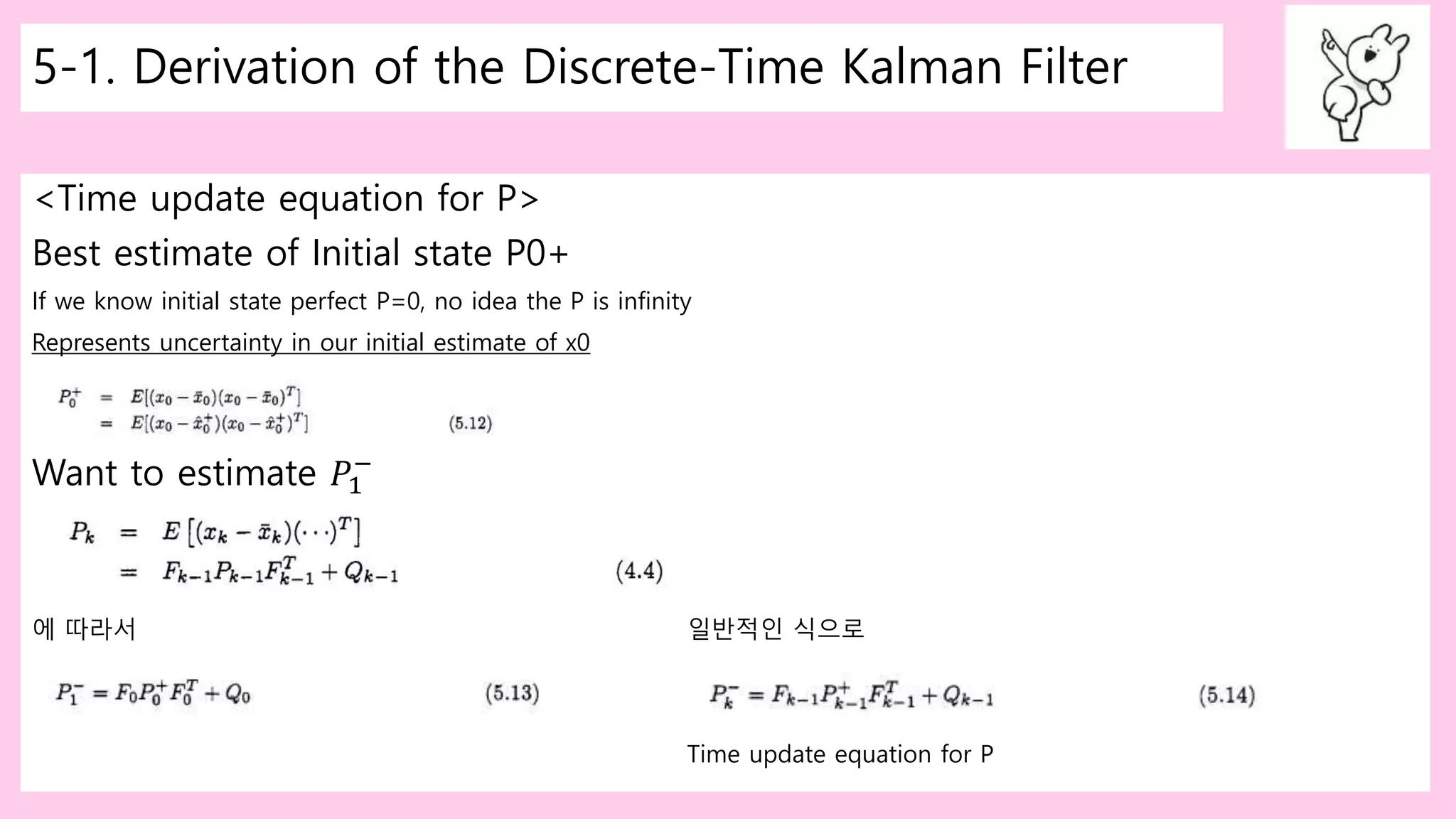
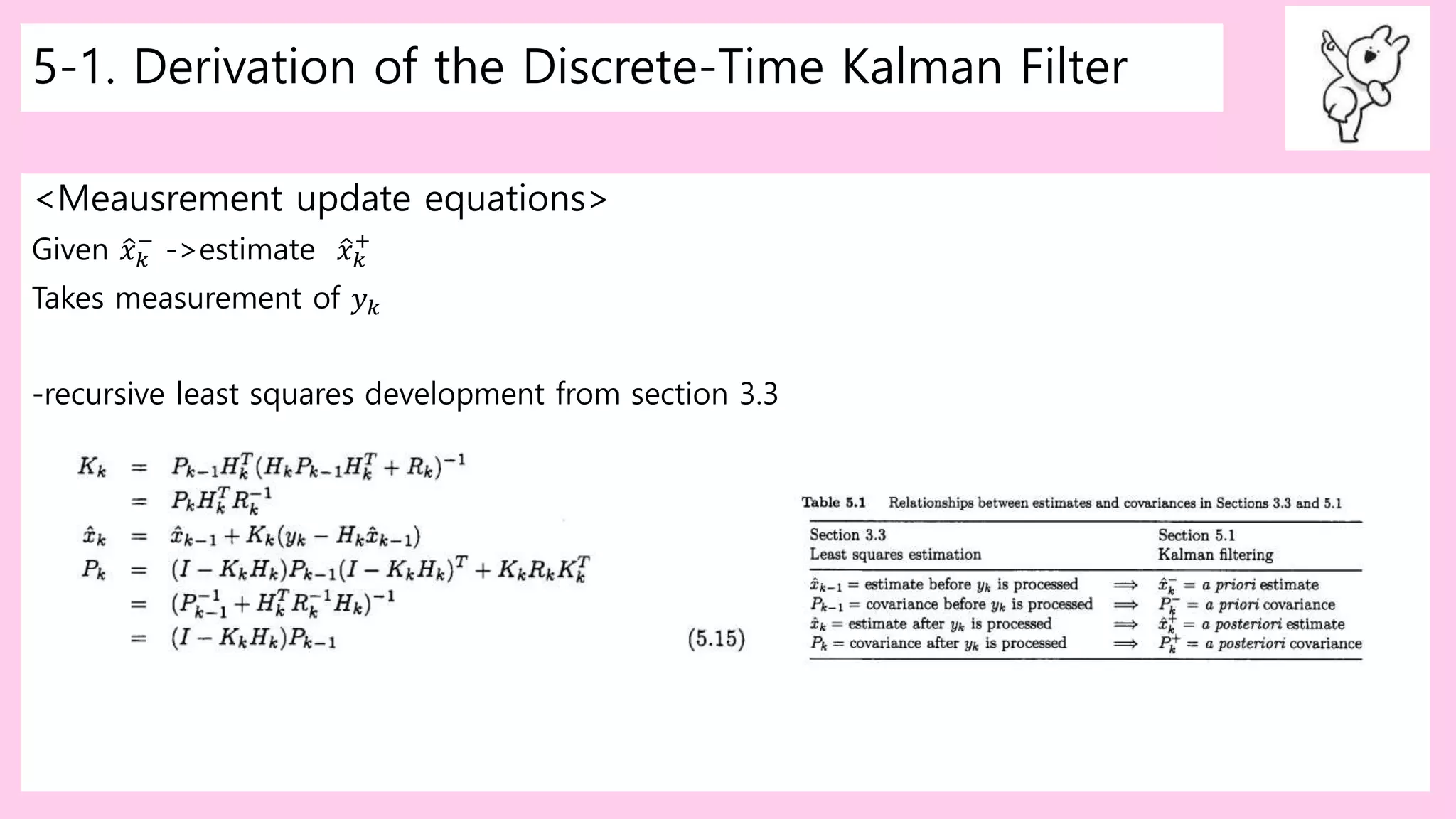
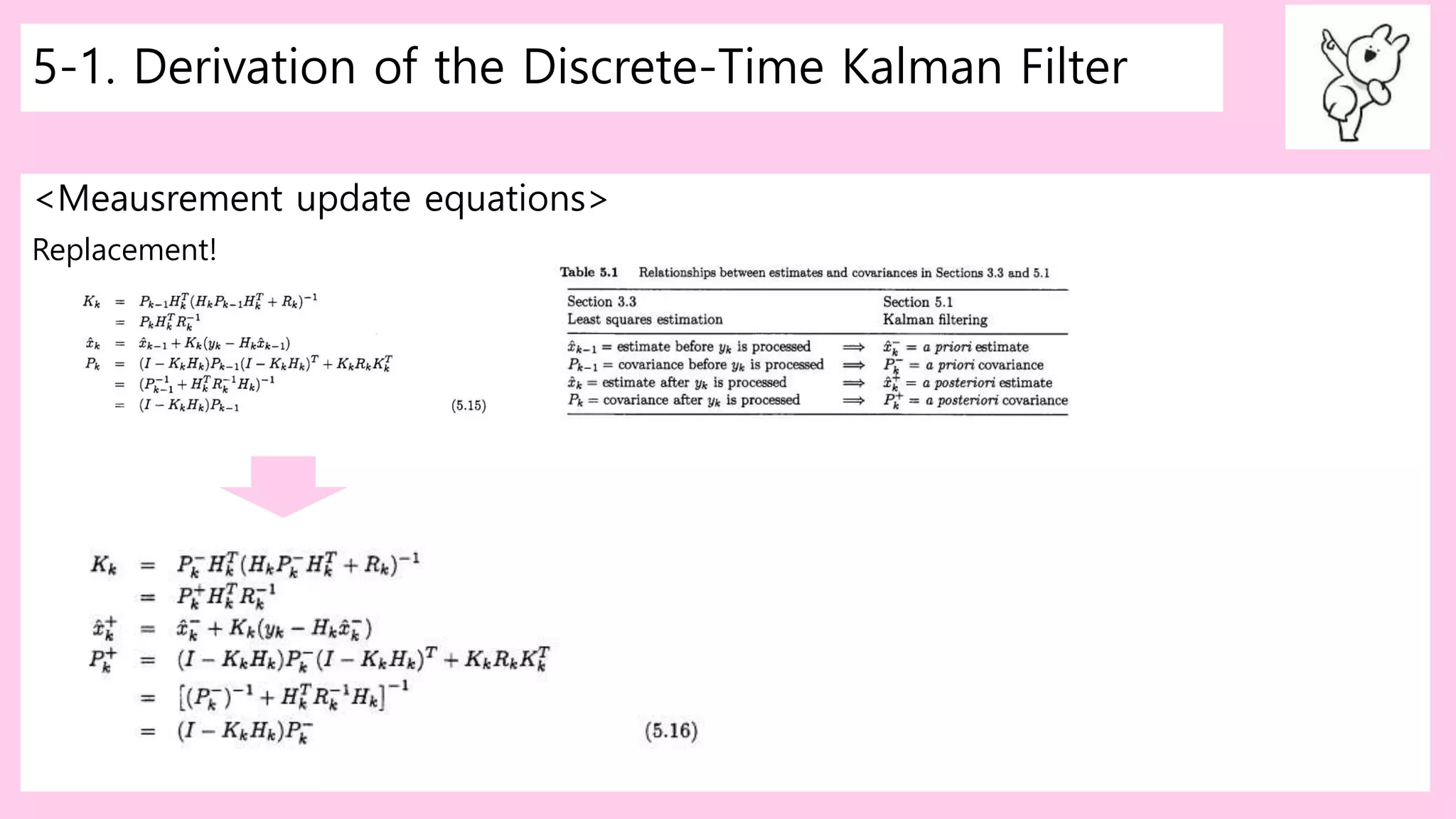
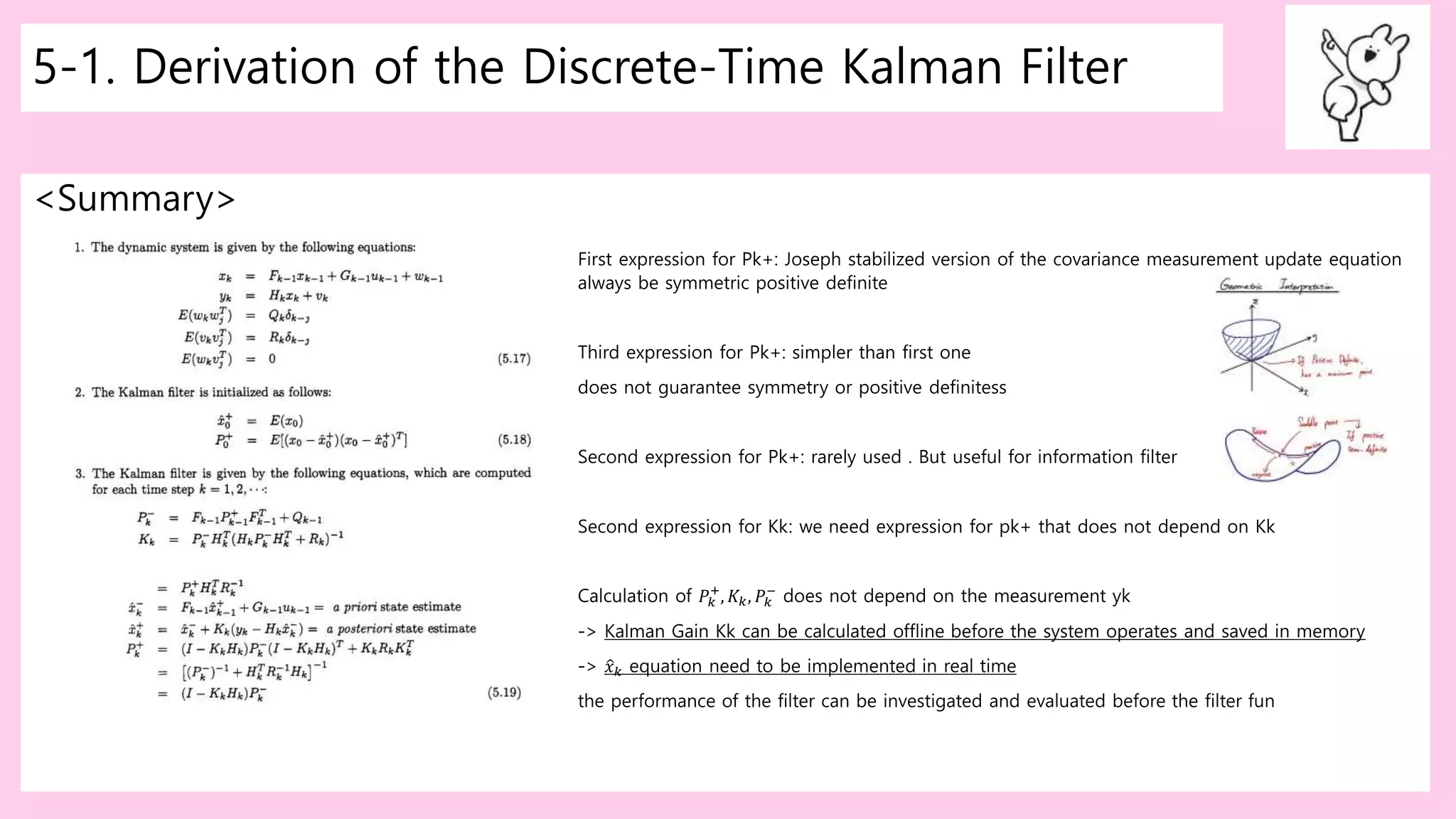
The document summarizes key concepts about the discrete-time Kalman filter. It describes how the Kalman filter uses a set of mathematical equations to estimate the state of a dynamic system based on a series of measurements over time that contain noise. These equations estimate the state mean and covariance to minimize the error between the true state and the estimated state. The derivation of the filter equations is shown, including the time update and measurement update equations. Issues like divergence due to modeling errors and numerical problems are discussed, along with remedies like adding fictitious process noise.
![Sensor Fusion Study - Ch7. Kalman Filter Generalizations [김영범]](https://cdn.slidesharecdn.com/ss_thumbnails/ch7kalmanfiltergeneralizations-200715034919-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch15. The Particle Filter [Seoyeon Stella Yang]](https://cdn.slidesharecdn.com/ss_thumbnails/particlefilter-200815094542-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch8. The Continuous-Time Kalman Filter [이해구]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter8-thecontinuoustimekalmanfilter-200715035017-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch3. Least Square Estimation [강소라, Stella, Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter3-200521130800-thumbnail.jpg?width=640&height=640&fit=bounds)














![Av 738- Adaptive Filtering - Wiener Filters[wk 3]](https://cdn.slidesharecdn.com/ss_thumbnails/av-738-aft-spr18-lecture03-optimumfilters-weinerwk3-180215235757-thumbnail.jpg?width=640&height=640&fit=bounds)

















![Sensor Fusion Study - Ch14. The Unscented Kalman Filter [Sooyoung Kim]](https://cdn.slidesharecdn.com/ss_thumbnails/ukf-200817092334-thumbnail.jpg?width=640&height=640&fit=bounds)




![Sensor Fusion Study - Ch9. Optimal Smoothing [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/optimalsmoothing-200815074615-thumbnail.jpg?width=640&height=640&fit=bounds)


![Sensor Fusion Study - Ch12. Additional Topics in H-Infinity Filtering [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/ch12-200815075328-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch2. Probability Theory [Stella]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter2-200424170905-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch4. Propagation of states and covariance [김동현]](https://cdn.slidesharecdn.com/ss_thumbnails/optimisticstudychapter4-200520224531-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Real World 1: Lidar radar fusion [Kim Soo Young]](https://cdn.slidesharecdn.com/ss_thumbnails/lidarradarfusion-200815095222-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch11. The H-Infinity Filter [김영범]](https://cdn.slidesharecdn.com/ss_thumbnails/11h-inf-200815075146-thumbnail.jpg?width=640&height=640&fit=bounds)

![Sensor Fusion Study - Ch6. Alternate Kalman filter formulations [Jinhyuk Song]](https://cdn.slidesharecdn.com/ss_thumbnails/ch6alternative-200712162741-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Ch1. Linear System [Hayden]](https://cdn.slidesharecdn.com/ss_thumbnails/osech1slide-200424170544-thumbnail.jpg?width=640&height=640&fit=bounds)
![Sensor Fusion Study - Real World 2: GPS & INS Fusion [Stella Seoyeon Yang]](https://cdn.slidesharecdn.com/ss_thumbnails/gpsins-200817095309-thumbnail.jpg?width=640&height=640&fit=bounds)



















