Download to read offline



















![References
[1] Understanding and Applying Kalman Filtering, Lindsay Kleeman, Department
of Electrical and Computer Systems Engineering Monash University, Clayton
[2] Ba-Ngu Vo, Random Finite Set for Multi-object Dynamical System,
Department of ECE Curtin University Perth Western Australia](https://image.slidesharecdn.com/moft-tutorials-kalman-filtering-and-kalman-filters-pdf-ppt-part1-v1-200614154005/75/Kalman-Filtering-26-2048.jpg)


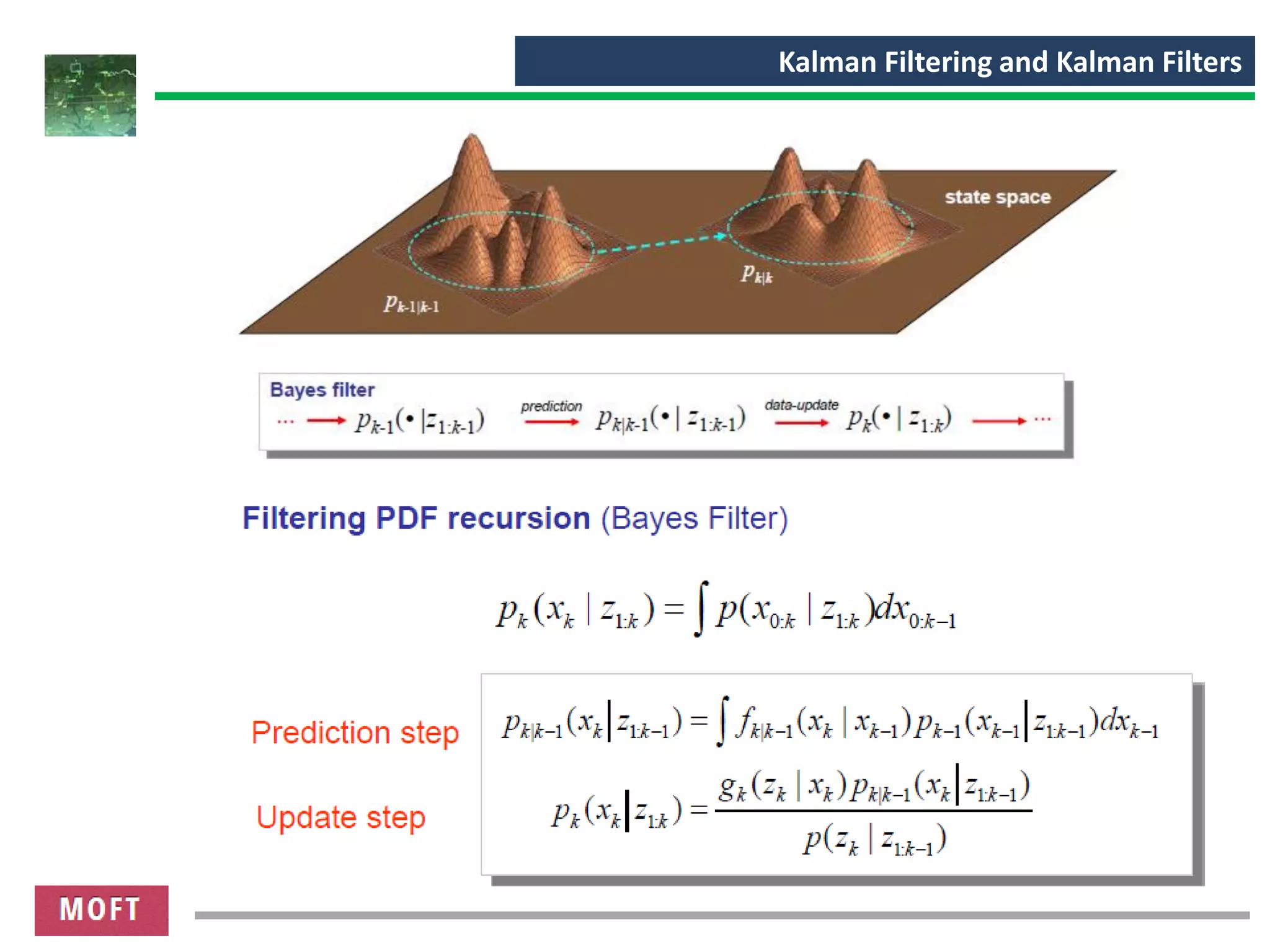
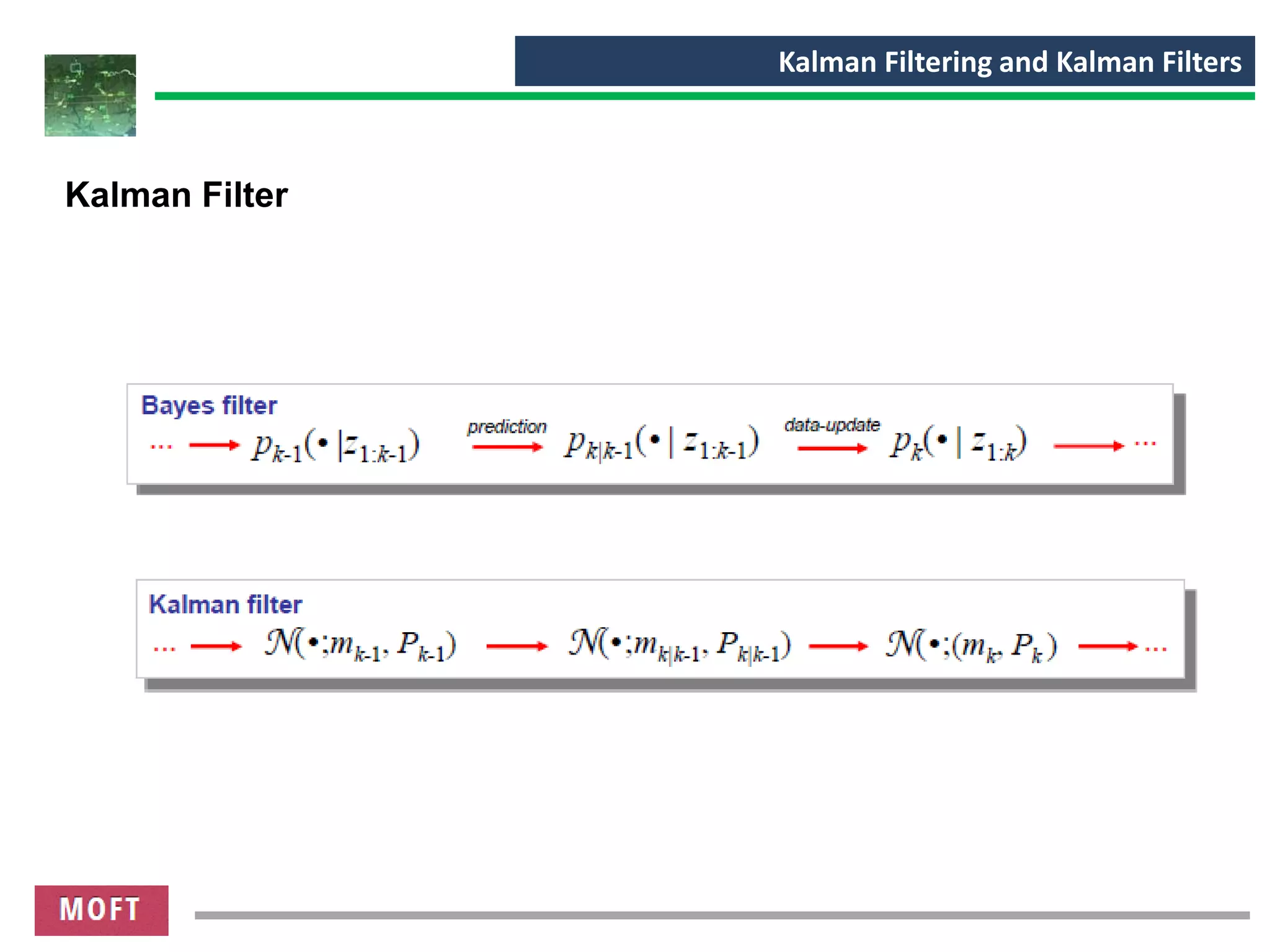
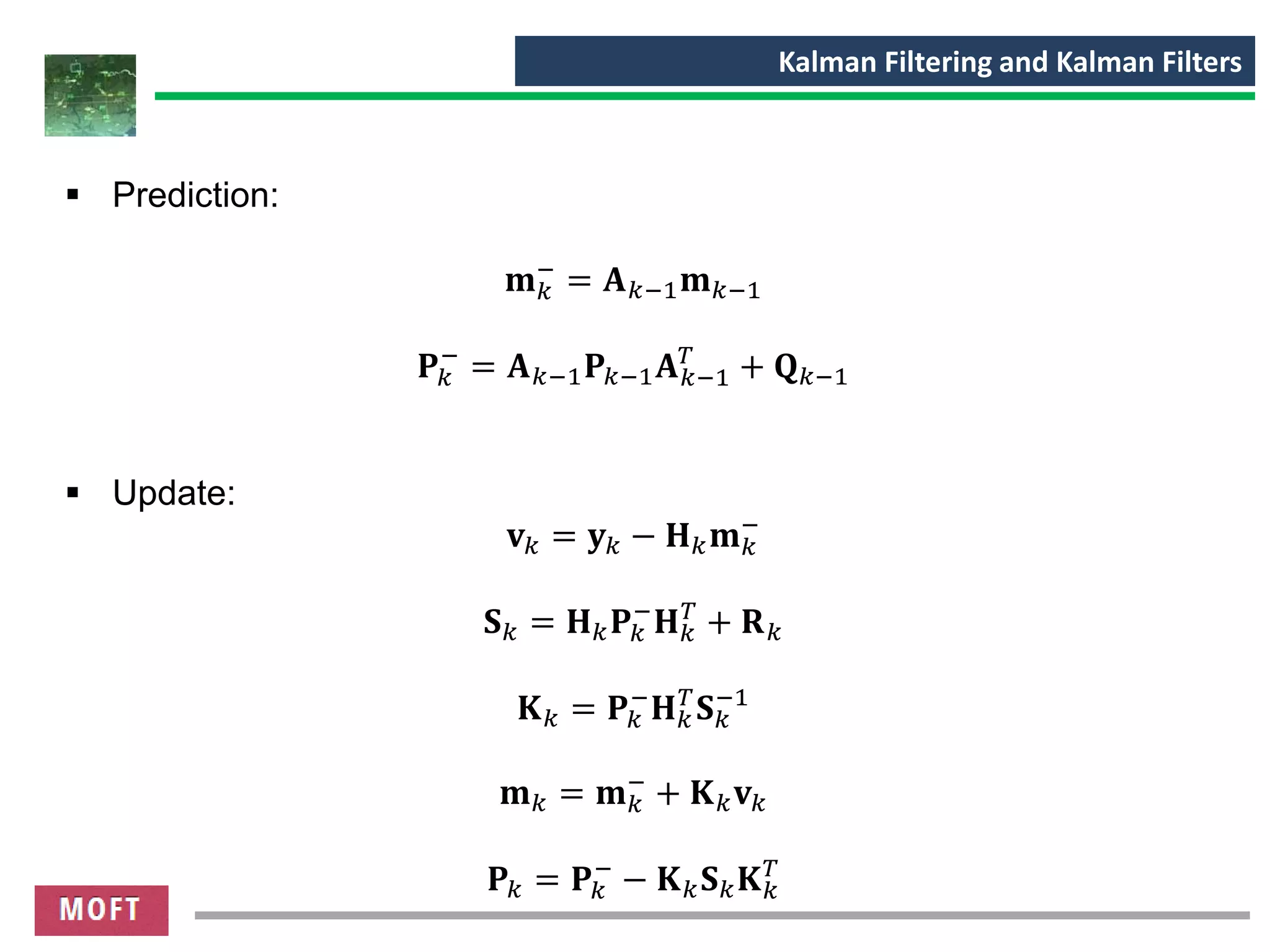
This document provides an overview of Kalman filtering and Kalman filters. It discusses how Kalman filtering is used for optimal filtering and state estimation of time-varying dynamic systems observed through noisy measurements. It describes the prediction and update steps of the Kalman filter, which provides a recursive solution for optimally estimating the state of linear dynamic systems from a series of noisy measurements over time. It also discusses extensions of the Kalman filter, such as the extended Kalman filter (EKF) and unscented Kalman filter (UKF), which can be applied to nonlinear systems.