Downloaded 92 times
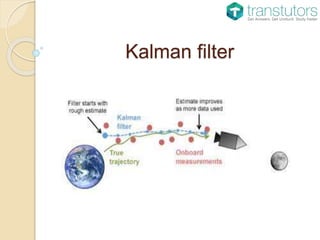


The Kalman filter, known for linear quadratic estimation, improves the estimation of unknown variables in systems with statistical noise by utilizing Bayesian inference. Initially developed by Kalman and his colleagues, it has widespread applications in navigation systems for military vehicles, robotics, and time-series analysis. Its two-step prediction and correction process allows for effective object tracking without assuming Gaussian errors, and it includes extensions for nonlinear systems.