Download to read offline
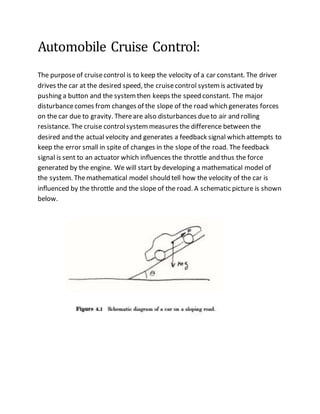
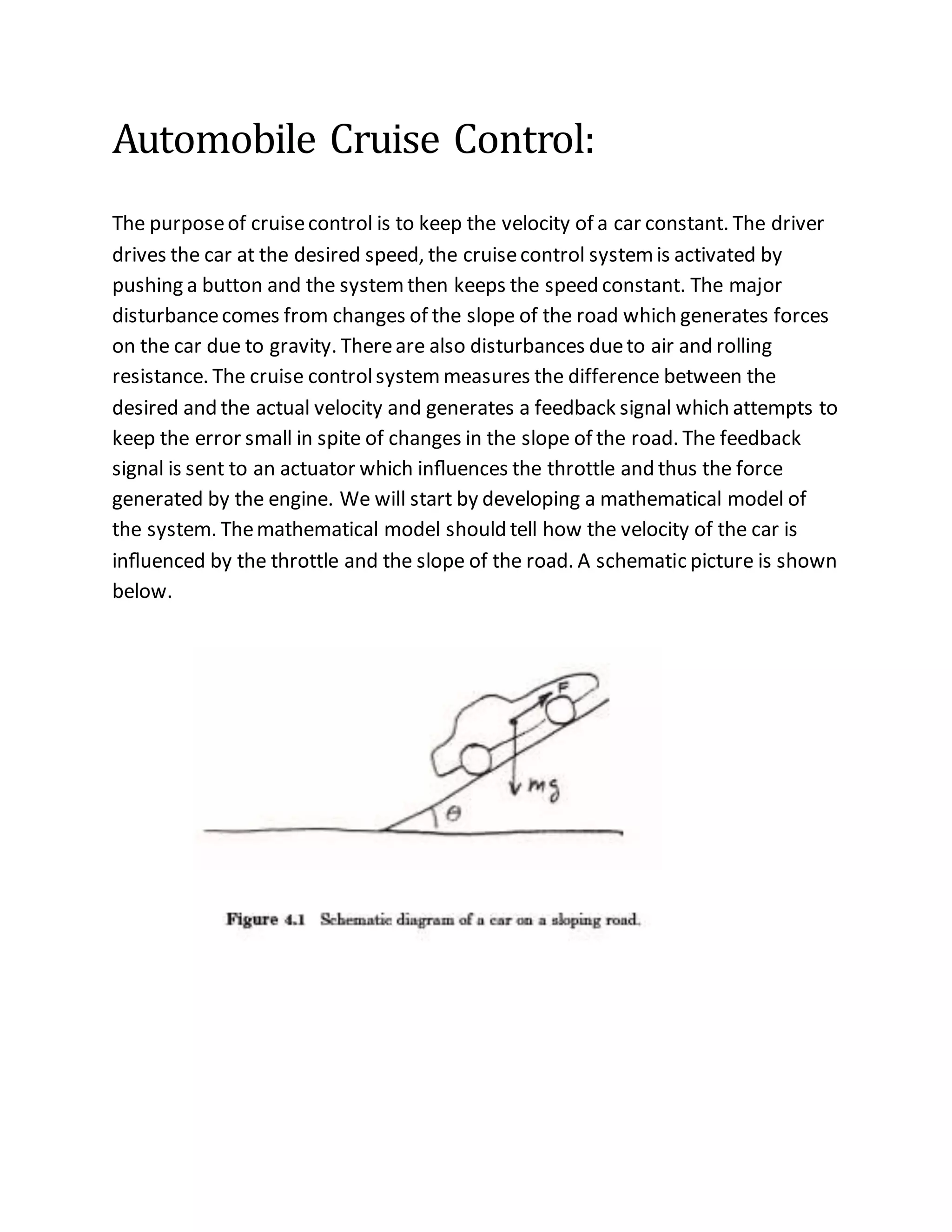






The document summarizes the modeling and control of an automobile cruise control system. It develops a mathematical model that relates the velocity of the car to the throttle setting and slope of the road. A PI controller is designed using this model to maintain a constant velocity even when the road slope changes. Parameters for the PI controller are selected to provide critical damping and a response speed that balances minimizing velocity errors with smooth control signals. Simulation results demonstrate the cruise control system can effectively maintain the desired velocity when the road slope changes compared to an open loop system without control.