Industrial Automation Training Session 09 covers control systems basics, including:
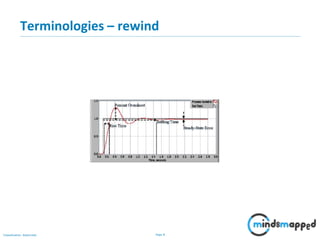
- The characteristics of control systems such as accuracy, sensitivity, noise, stability, bandwidth, speed, and oscillation.
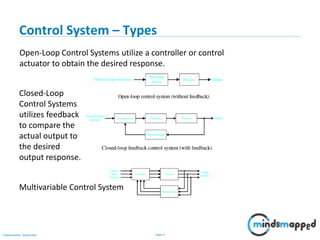
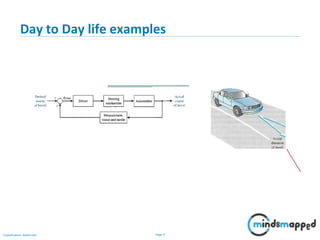
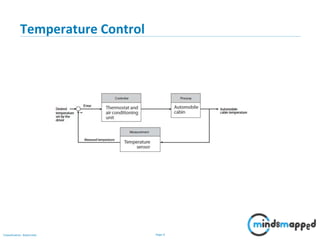
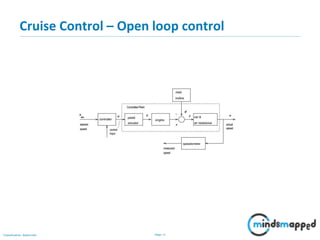
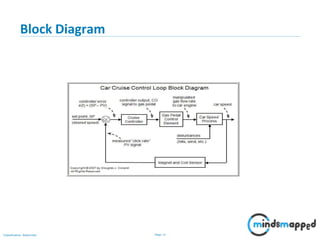
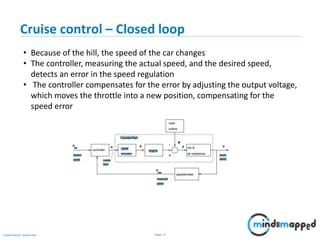
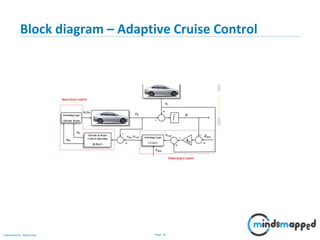
- Different types of control systems like open-loop and closed-loop systems.
- Examples of control systems in everyday life including temperature control and cruise control in cars.
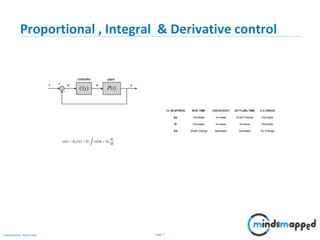
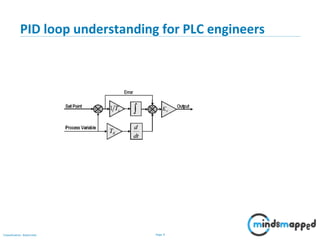
- How proportional, integral, and derivative (PID) control works in control loops.



































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

















