
More Related Content
Similar to Closed-loop control system modelling_pid.pptx
Similar to Closed-loop control system modelling_pid.pptx (20)
More from KadiriIbrahim2
More from KadiriIbrahim2 (11)
Recently uploaded
Recently uploaded (20)
Closed-loop control system modelling_pid.pptx
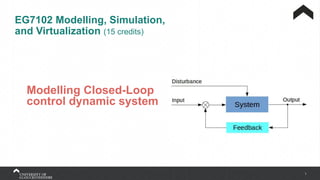
- 1. 1 EG7102 Modelling, Simulation, and Virtualization (15 credits) Modelling Closed-Loop control dynamic system
- 2. What do we mean by Automatic Control? • An Automatic control system is an interconnection of components forming a system configuration that will provide a desired system response The input signal is processed to induce an output signal, this is generally done using powr amplification. • The basis for analysis of a system is the foundation provided by linear system theory. Produce a cause-and-effect relationship of the process An input output relation can be deduced from the block diagram
- 3. 3 What do we mean by Open Loop and Closed Loop? • An open-loop (or feedforward) control system utilizes an actuating device to control the process directly without using feedback. Open loop control system
- 4. 4 When damp clothes are put in the dryer machine, the operator/user sets the time for drying the clothes. This time acts as the input signal for the dryer. Correspondingly at the end of that time, the machine stops and clothes can be taken out. Examples of open-loop control system
- 5. 5 What do we mean by Open Loop and Closed Loop? • A closed-loop control system uses a measurement of the output and feedback of this signal to compare it with the desired output (reference or command). Closed loop (or feedback) control system
- 6. Examples of Open Loop Systems Imagine a blind and deaf person that needs to get her car to 100Km/h, but she cannot see the speedometer or hear the engine revs. How will she do it? In all likelihood she will call on experience and memory and estimate the foot pedal position required to reach the desired speed. Will you get good toast at the end? You have a toaster in which to make toast, but you are deaf and blind. You start counting from 1 to 120 seconds to toast the bread. Will she reach the desired speed? Clearly the biggest issue here is a lack of measurement or information. We have no means of measuring the output and thus no information. Without information we have no mechanism for adjusting the system input. NO!!! Open-loop control means no measurement of the output and thus the input is an estimate. In practice the estimate is wrong and hence the output behaviour will not match the target.
- 7. The fascinating property of feedback Why do I need feedback in Engineering systems? The system compares the actual result with the desired result, and thus takes action(s) based on the difference. simple idea but tremendously powerful, and in some cases revolutionary. The opposite of feedback control is feedforward or open loop control: i.e. devise a plan and execute it. make good systems from bad components Make a system insensitive to disturbances and component variations Stabilize an unstable system Create desired behaviour Feedback implies increased cost, can cause instabilities, and sensor noise may be fed into the system However!!!!
- 8. 8 How do we represent Automatic Control Systems?
- 9. 9 How do we represent Automatic Control Systems?
- 10. 10 • Most of the cars have thermostatically controlled Air-Conditioning (AC) systems for the comfort of the passengers. • The block diagram depicts an AC system where the driver sets the desired interior temperature on a dashboard panel. • The thermostat and the AC unit corrects any deviation of the automobile cabin temperature through the use of the temperature sensor Measures the temperature in the cabin Corrects any deviation from the temperature set by the driver Car temperature control system Car cabin Car cabin temperature
- 11. 11 Car steering control system The driver uses the difference between the actual and the desired direction of travel to generate a controlled adjustment of the steering wheel The desired course is compared with a measurement of the actual course in order to generate a measure of the error This measurement is obtained by visual and tactile (body movement) feedback, as provided by the feel of the steering wheel by the hand (sensor). Car
- 12. 12 • Because a sailboat cannot sail directly into the wind, and traveling straight downwind is usually slow, the shortest sailing distance is rarely a straight line. • Thus sailboats tack upwind—the familiar zigzag course—and jibe downwind. A tactician's decision of when to tack and where to go can determine the outcome of a race. Control system Example - Sailboat Direction Control
- 13. 13 SISO and MIMO Control Systems Control systems are also classified into these two categories, named as: • Single Input Single Output systems. (SISO) • Multiple Input Multiple Output systems. (MISO) A Radio system is a typical example of a Multiple Inputs Multiple Outputs system. A combination of Input signals is applied and transmitted over multiple lines to produce the required communication signals at the output. A fan speed control is a very common example of a Single Input Single Output system. A single input in terms of voltage is supplied to the system which in turn results in the fan working.
- 14. 14 Continuous and Discrete Time Control System • A continuous time signal refers to a signal, which is continuous in the time domain. • On the other hand, when a signal is discrete in the time domain, i.e. it can be obtained at discrete time intervals, it is called a discrete time signal.
- 15. 15 A continuous time control system, all the signals (including the input & output signals) are continuous in time. . Continuous and Discrete Time Control System
- 16. 16 A discrete time control system, all the signals of the control system (including the input and output signals) are discrete time signals. Continuous and Discrete Time Control System
- 18. Generic PID Control Equations – KP: proportional gain – KI: integral gain – KD: derivative gain 0 ( ) ( ) ( ) t c P I D P D I de u t K e t K e t dt K dt Time-domain P ( ) ( ) ( ) ( ) I c P D K U s K E s E s K sE s s D I S-domain
- 19. Effects of P, I & D Terms u(s) K(s) r(s) e(s) y(s) Plant Controller Set-Point Output • Proportional Action (P) • Integral Action (I) • Derivative Action (D)
- 20. 20 Types of PID Controllers Manufacturers of PID controllers arrange the Proportional, Integral and Derivative modes into one of three different controller algorithms or forms. These are called the 1. Interactive 2. Noninteractive 3. Parallel forms Some controller manufacturers allow you to choose between different forms as a configuration option in the controller software.
- 21. 21 Types of PID Controllers 1. Interactive
- 22. 22 Types of PID Controllers 2. Noninteractive: It is also called the Ideal, Standard or ISA
- 23. 23 Types of PID Controllers 3. Parallel
- 24. Amplitude Proportional - KP Response to unit step set-point change: 2nd Order system (z = 0.4, wn = 3) 1st Order system
- 25. Response to unit step set-point Integral Action - 1st Order Plant
- 26. Derivative - 1st Order Plant Time (sec.) Amplitude Step Response 0 2 4 6 8 10 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 Td=1 Td=2 Td=5 Response to unit step set-point change:
- 27. Closed-loop control using MATLAB Example 1
- 29. Matlab/Simulink PID from the Blockes Library
- 30. Closed-loop control using MATLAB PID block openExample('simulink_industrial/AntiWindupControlUsin gAPIDControllerExample')
- 31. vrmaglev • Open Matlab and type the following word to open the simulation model Closed Loop PID control using MATLAB/ 3D Simulation Toolbox
- 32. Questions