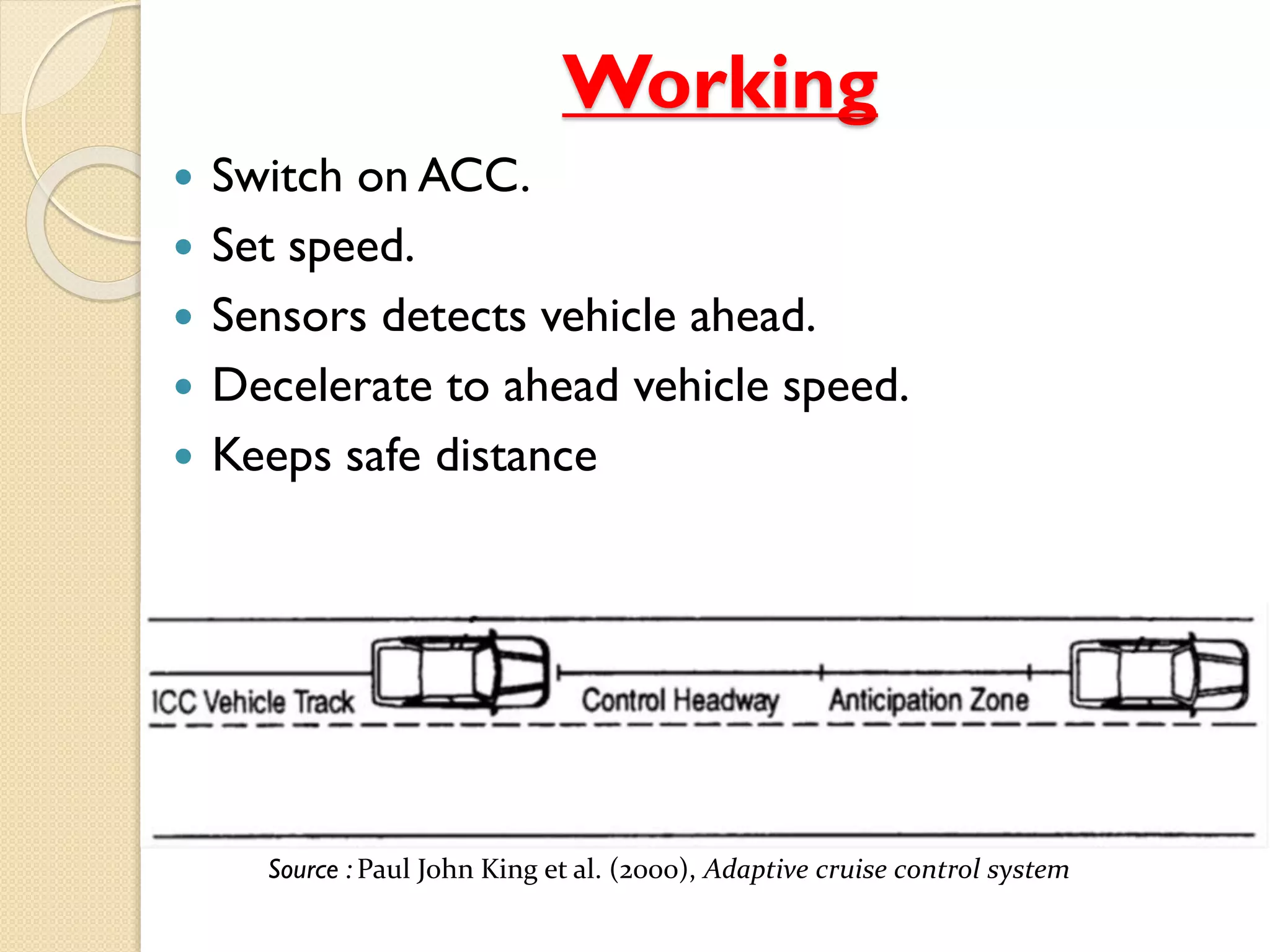
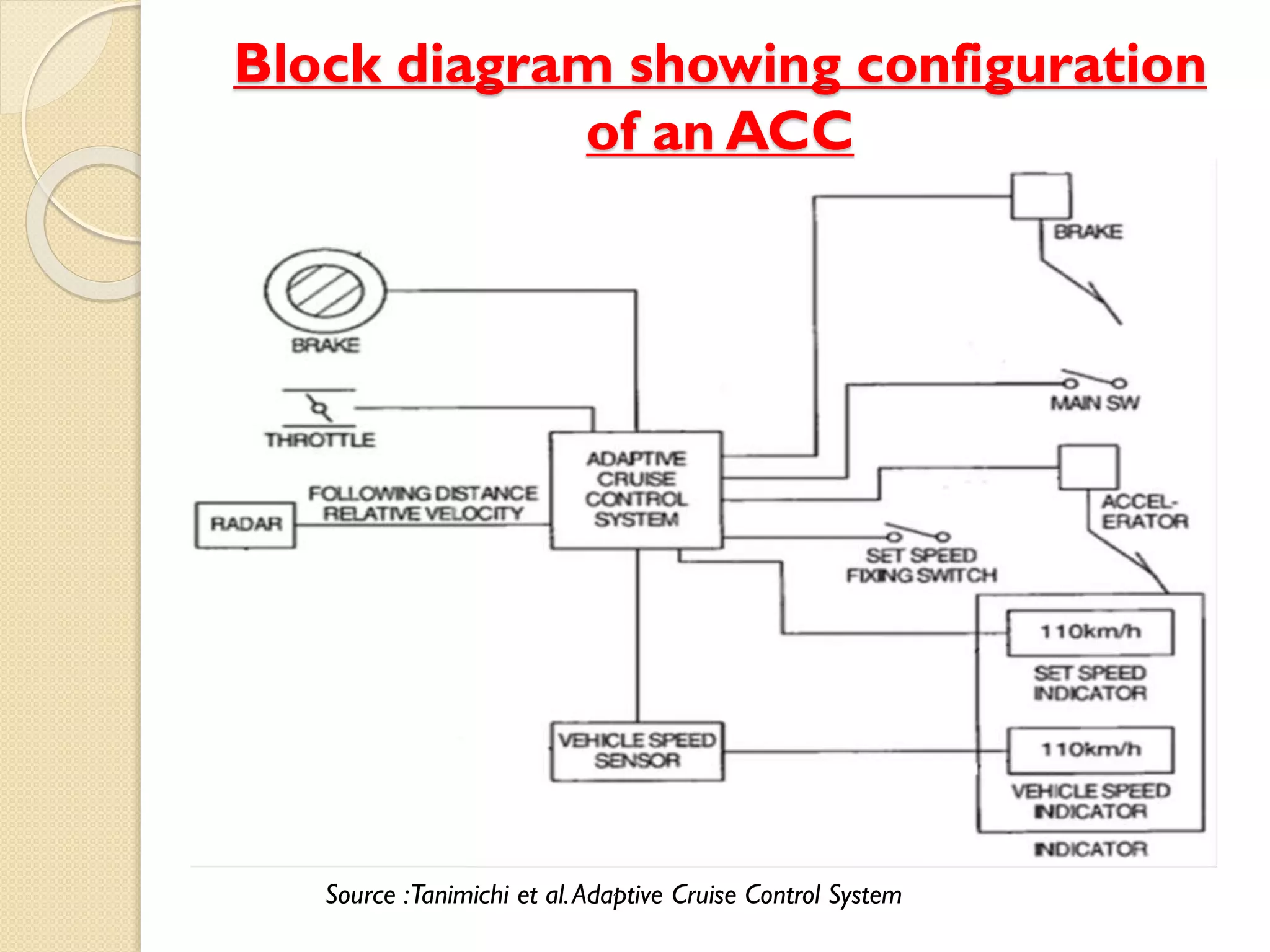
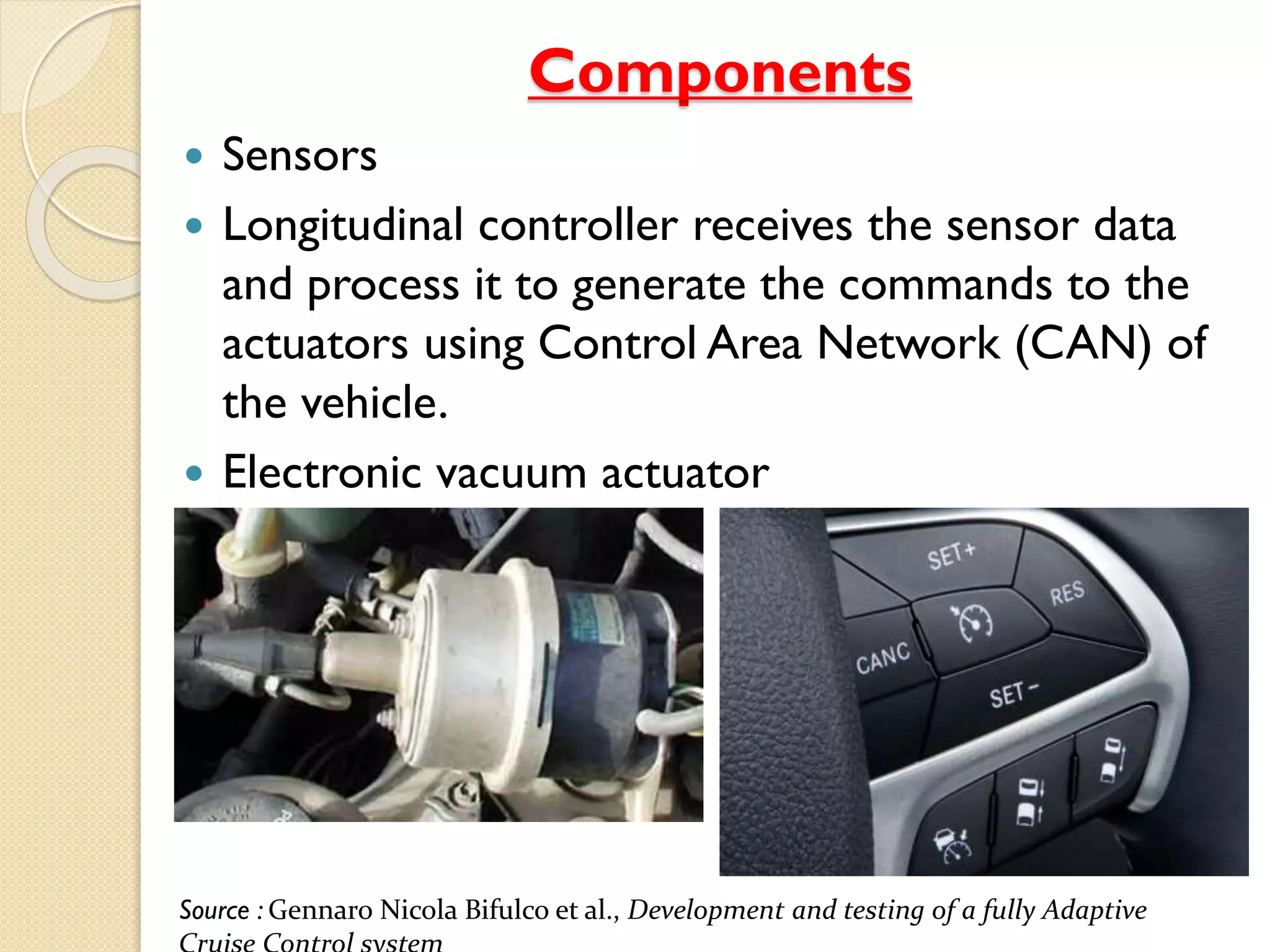
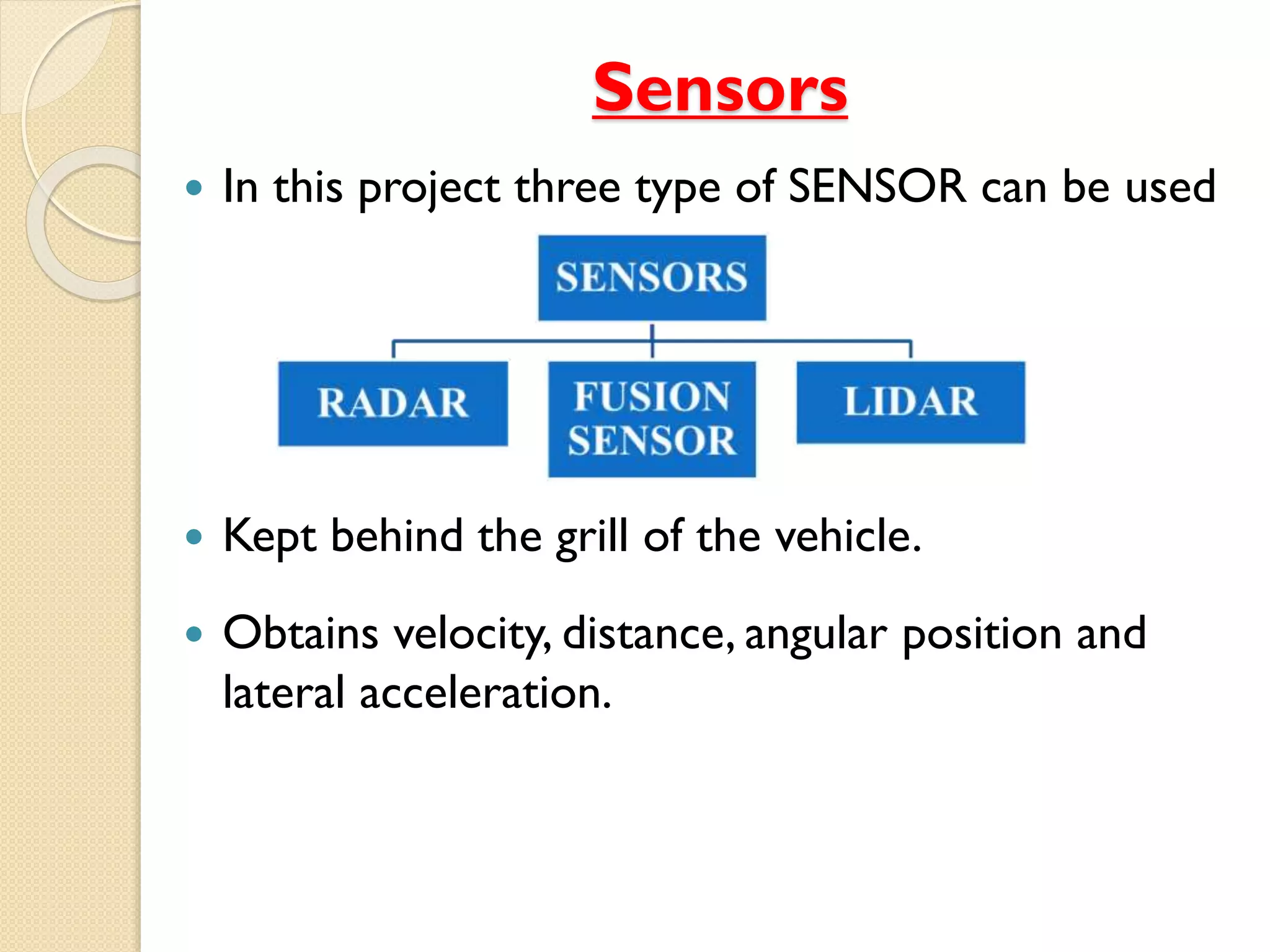
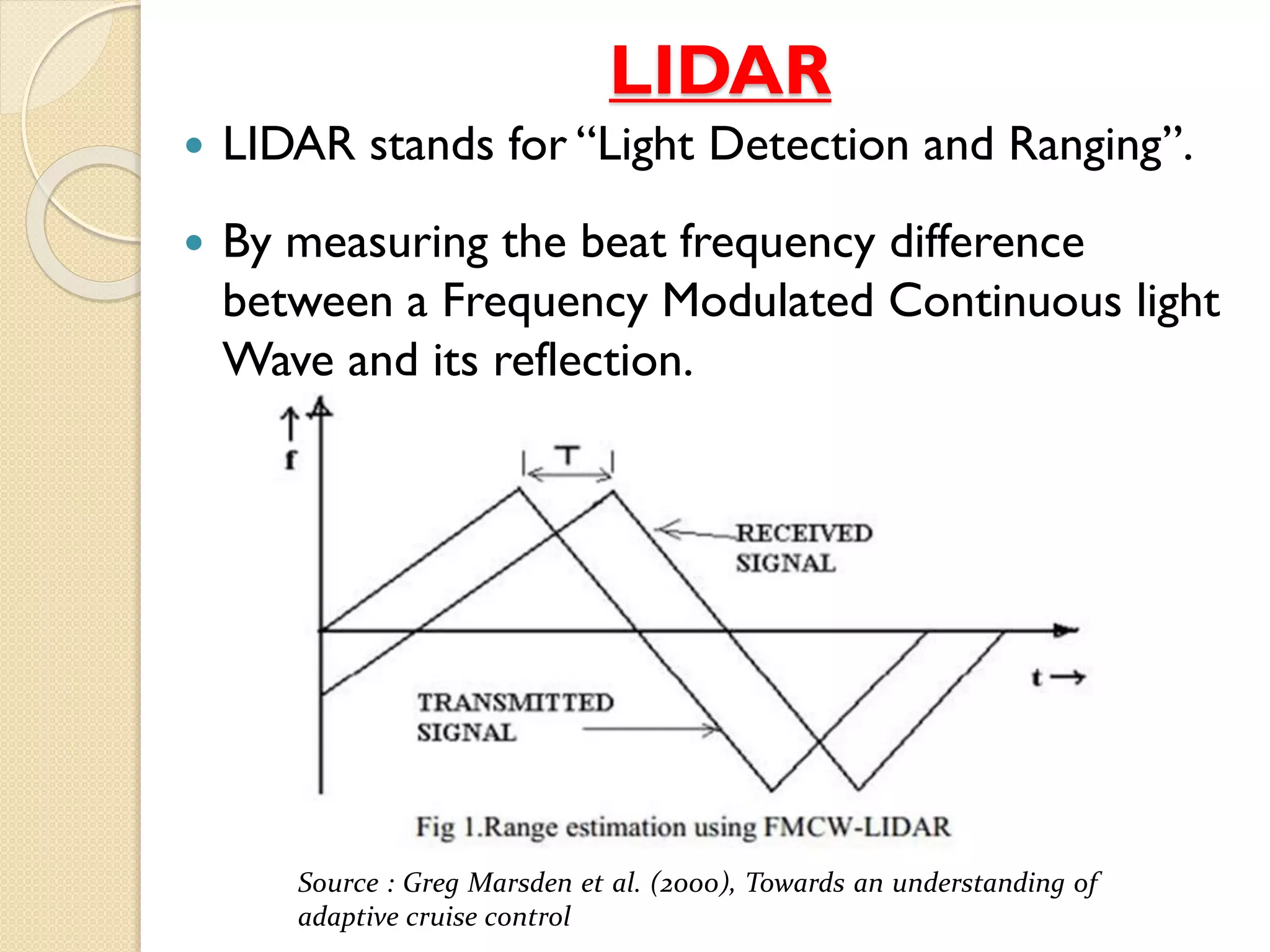
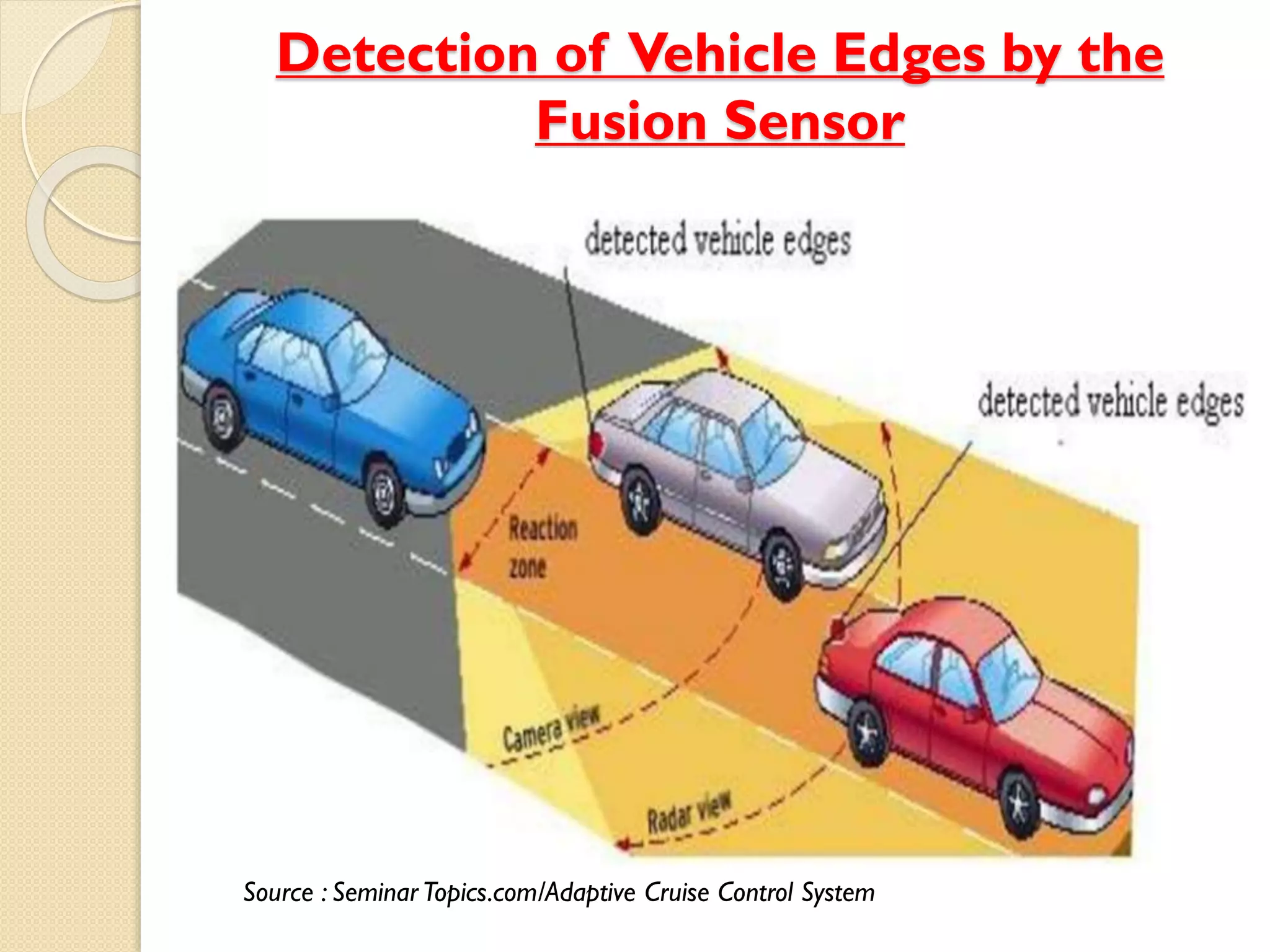
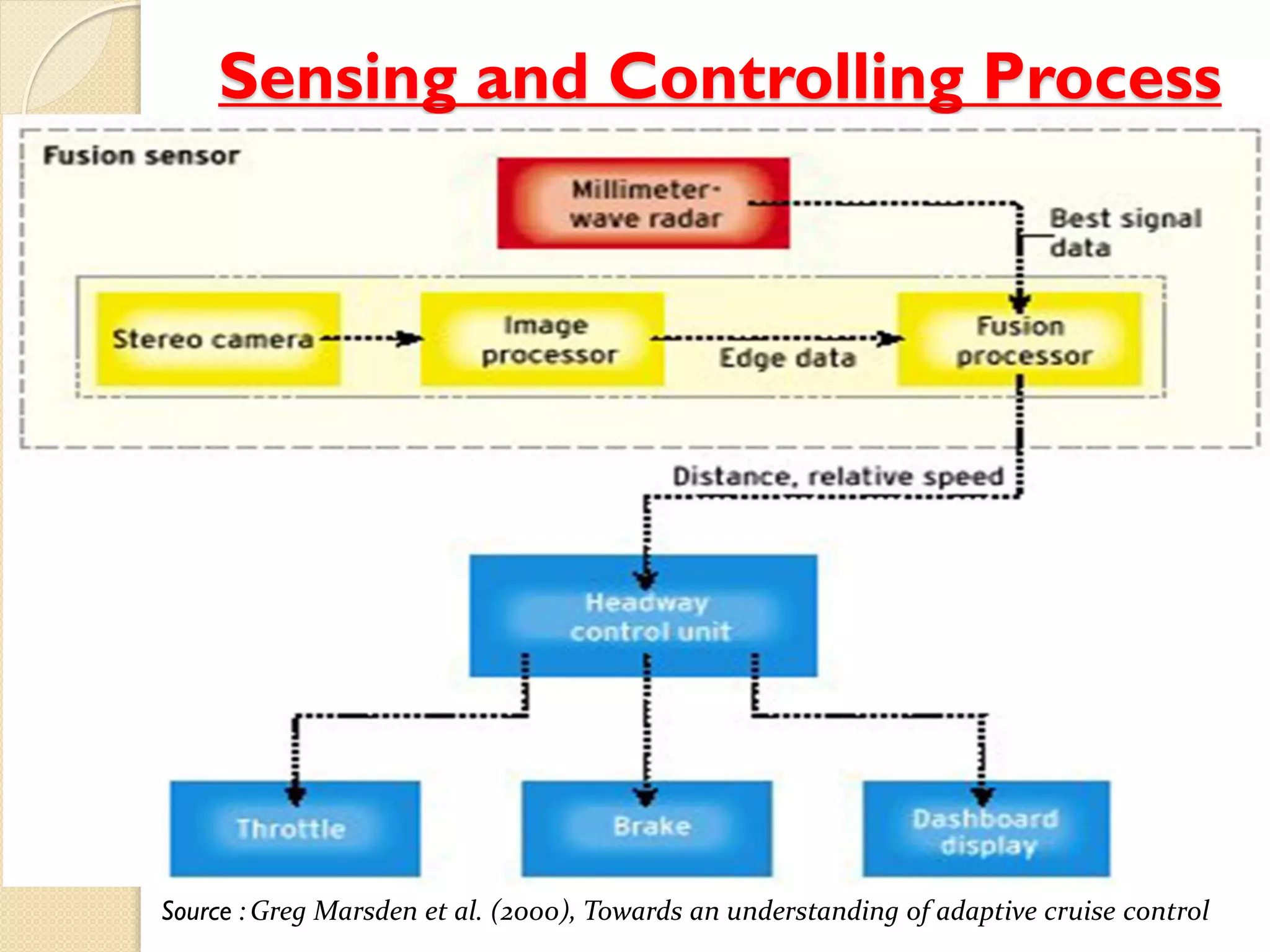
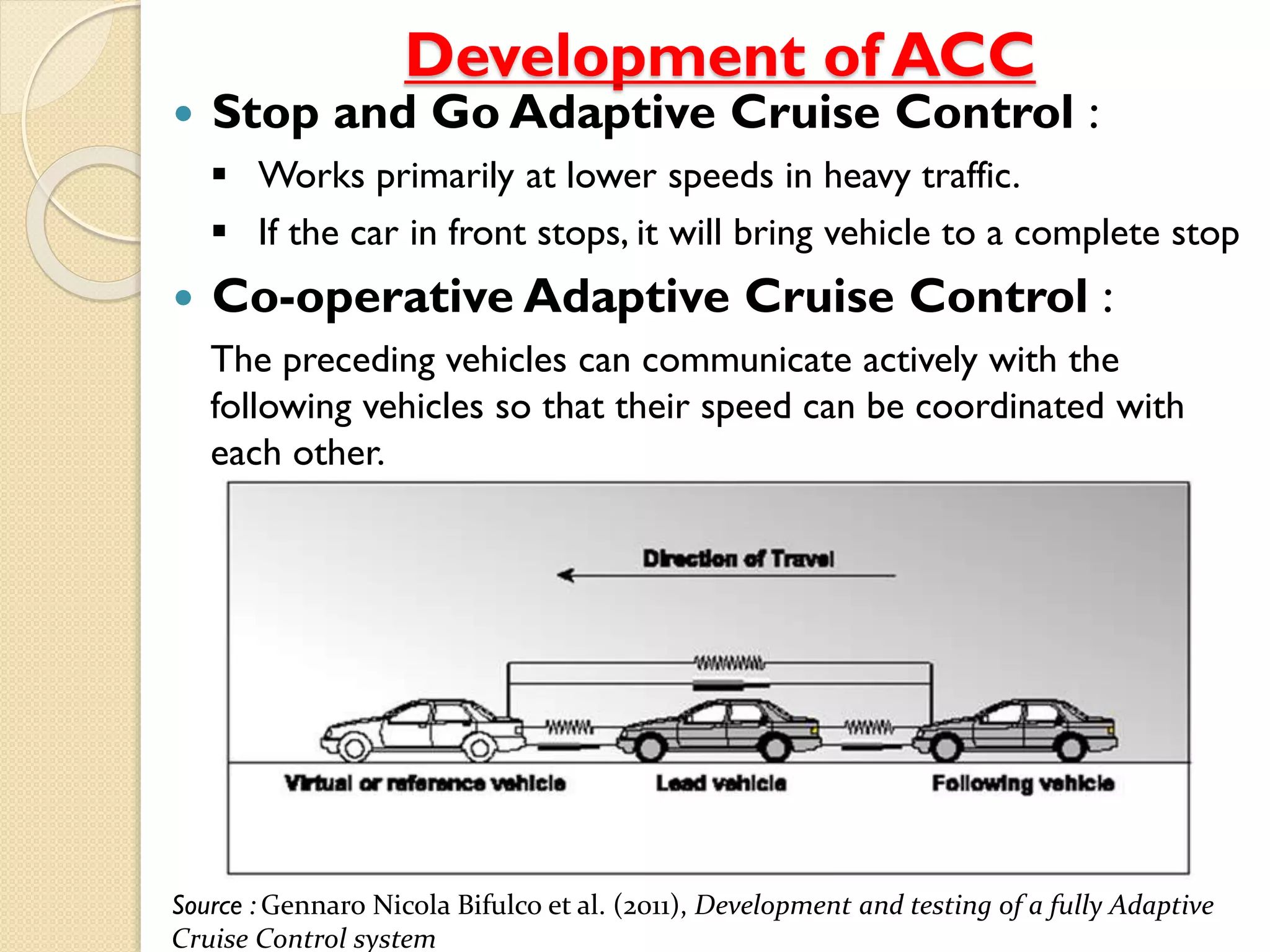
This document provides an overview of adaptive cruise control systems. It begins with background on increasing accident rates and the development of traditional cruise control. It then describes the components and working of adaptive cruise control, which uses sensors like LIDAR and RADAR to automatically control speed and maintain a safe distance from the vehicle ahead. The key benefits are reducing stress for drivers in traffic and helping to prevent accidents. While effective, adaptive cruise control systems are also expensive and may encourage driver complacency. The document concludes by anticipating continued improvements including the ability to stop and go in heavy traffic through vehicle-to-vehicle communication.