This document discusses the time response of a first order system to different input functions.
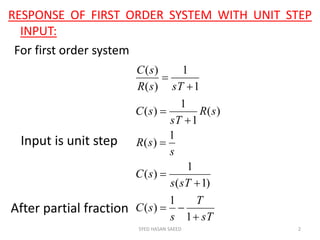
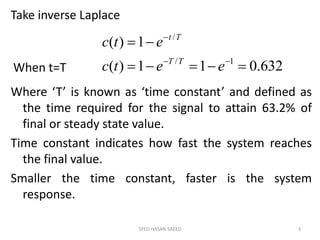
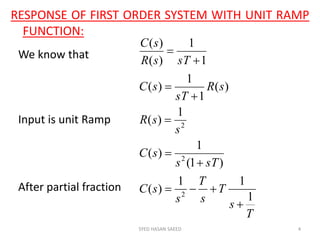
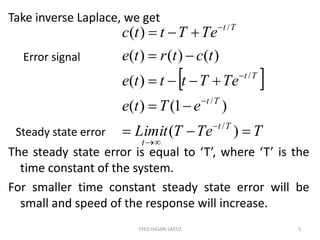
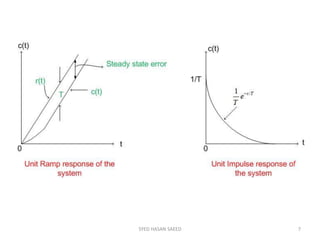
It describes how a first order system responds to a unit step input, with the output reaching 63.2% of its final value after one time constant. For a unit ramp input, the steady state error is equal to the time constant.
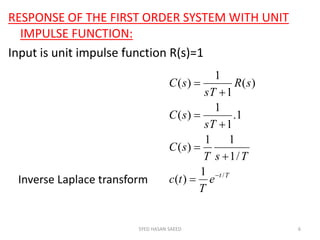
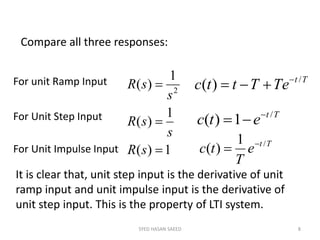
For a unit impulse input, the output is an exponential decay that returns the system to its initial state. The responses are related as the unit step is the derivative of the ramp, and the impulse is the derivative of the step, demonstrating the property of linear time-invariant systems.


































































![lcs_manual_1[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/lcsmanual11-230906185309-7d644dc9-thumbnail.jpg?width=640&height=640&fit=bounds)