Here are the key steps:
1) Identify the second order system transfer function:
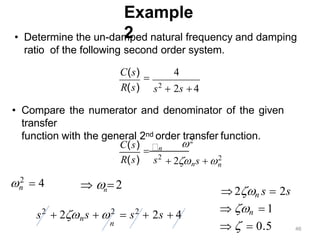
C(s)/R(s) = 4/(s^2 + 2s + 4)
2) Compare to the general second order system transfer function:
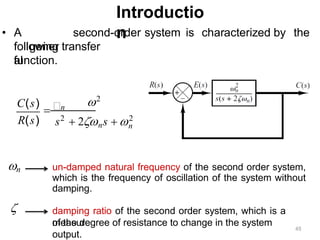
C(s)/R(s) = ωn^2/(s^2 + 2ζωns + ωn^2)
3) Equate coefficients:
ωn^2 = 4
2ζωn = 2
ωn = 2
ζ = 1
Therefore, the un-damped natural frequency (ωn) is 2 rad/s and the damping ratio (ζ) is 1.

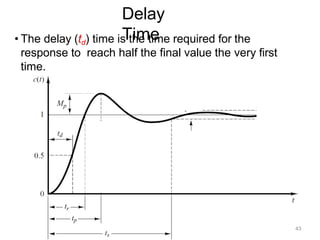
![First Order System With
Delays
[10(t 2) 10e1/3(t2)
]u(t 2)
4
2
10 10
L1
[es
F(s)] f (t )u(t )
s(3s1)
10
C(s)
R(s) 3s1
C(s)
10
e2s
1
)e ]
s s 1/ 3
L [( 2s
e2s
0 5 10 15
0
6
8
10
Step Response
Time (sec)
td2s
T3s
K10](https://image.slidesharecdn.com/timedomainanalysis-230720145530-e33f599f/85/time-domain-analysis-pptx-33-320.jpg)



























![lcs_manual_1[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/lcsmanual11-230906185309-7d644dc9-thumbnail.jpg?width=640&height=640&fit=bounds)

































