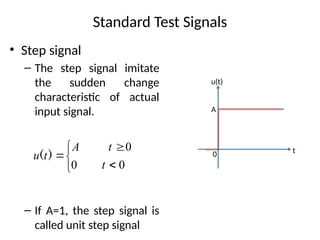
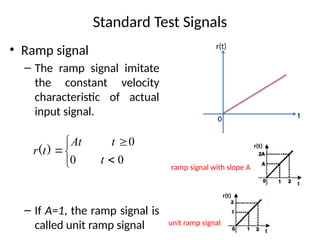
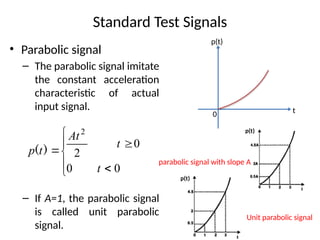
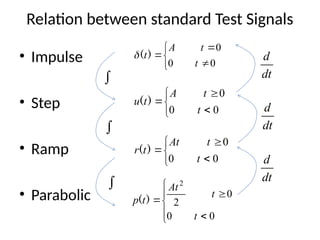
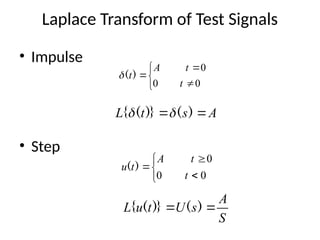
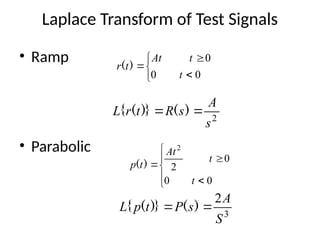
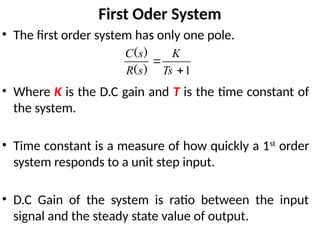
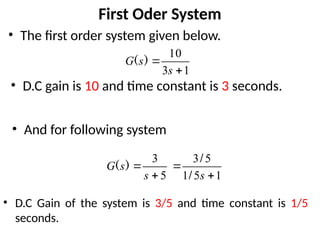
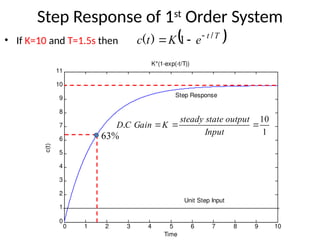
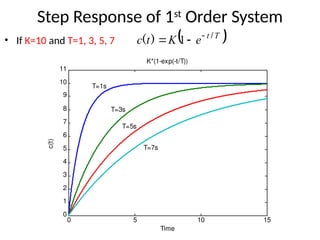
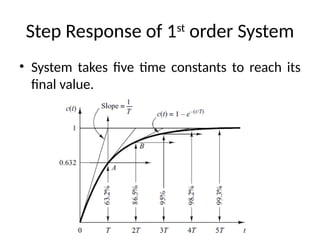
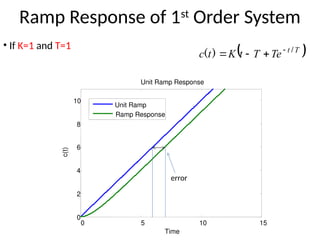
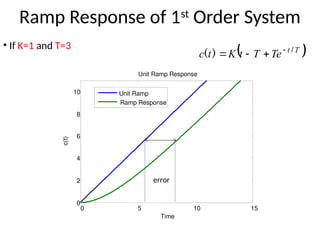
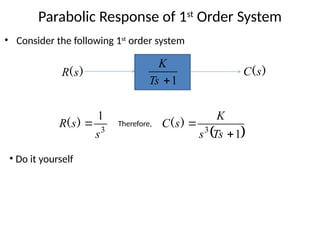
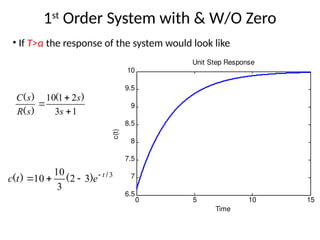
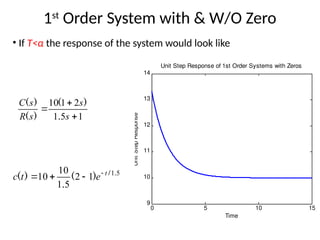
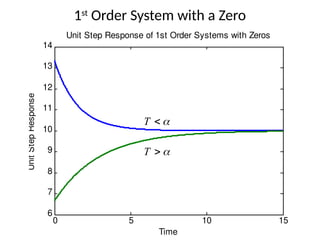
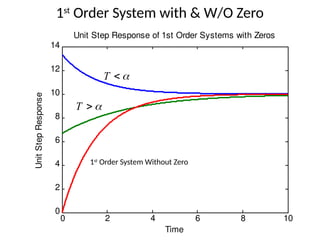
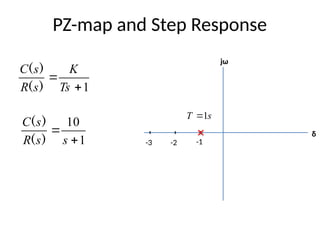
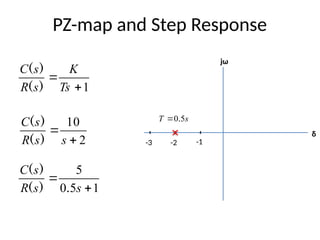
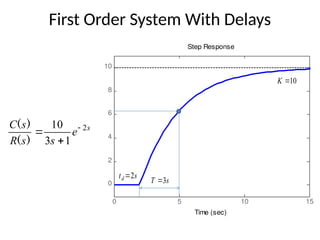
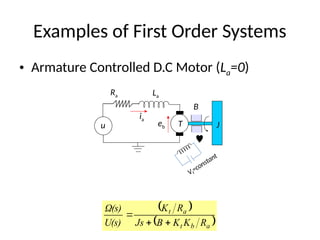
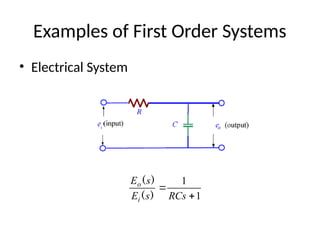
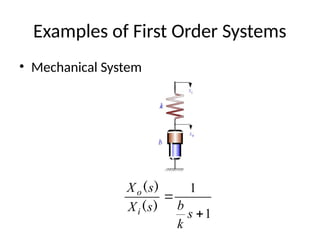
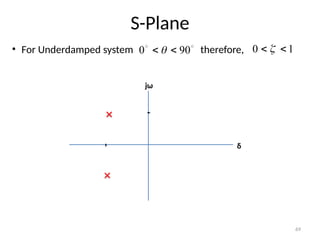
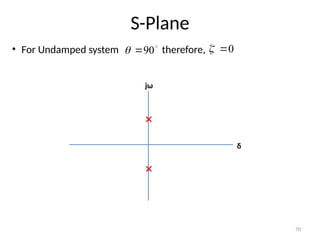
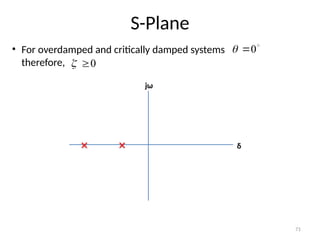
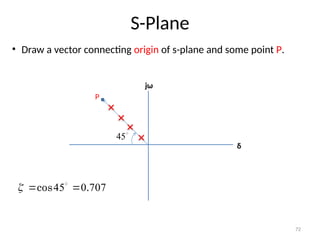
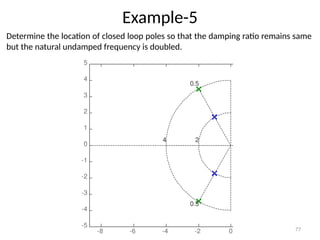
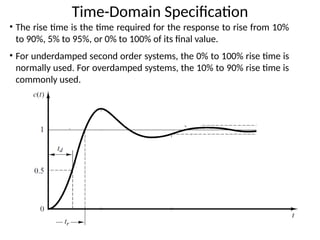
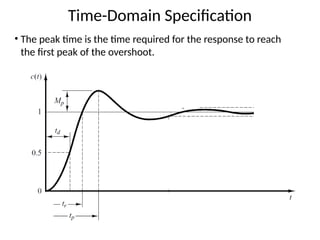
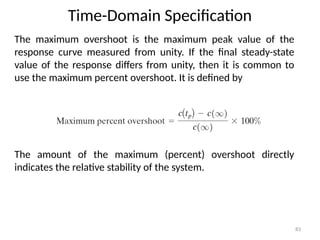
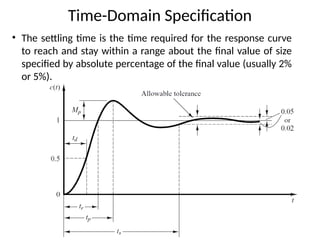
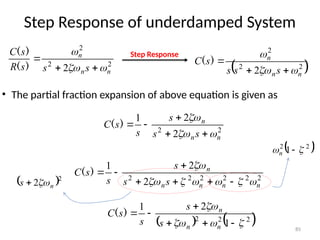
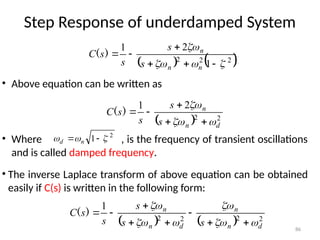
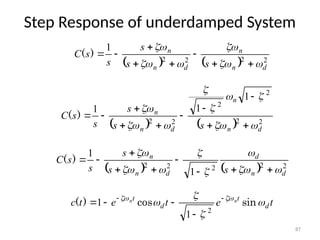
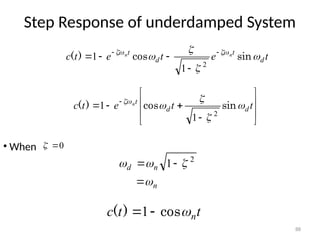
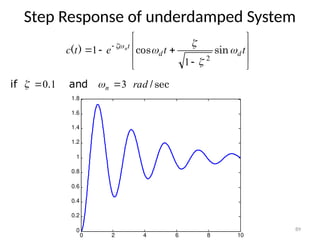
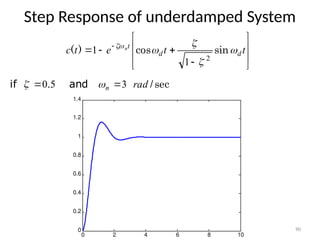
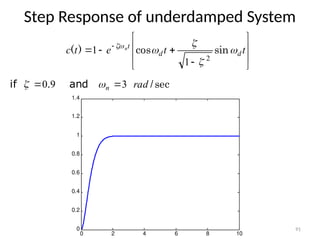
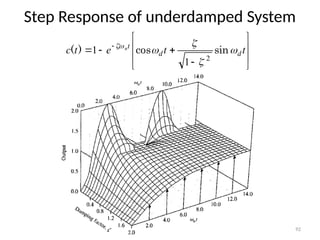
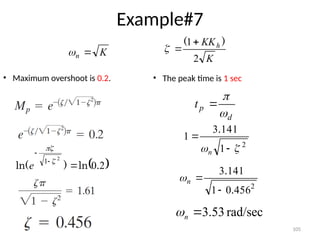
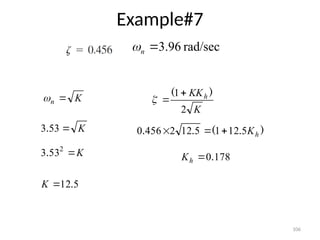
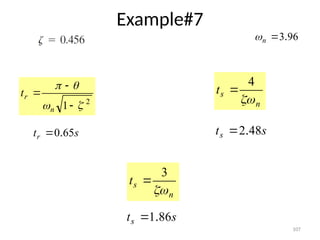
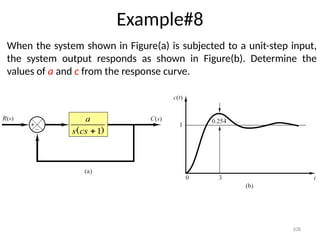
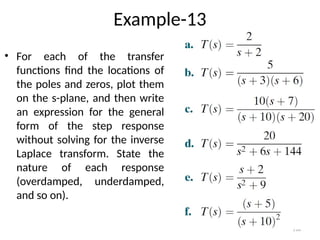
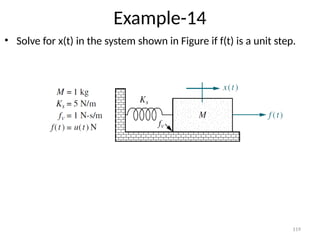
The document is a lecture note on transient response analysis of control systems, primarily detailing the time-domain analysis and response characteristics of dynamic systems. It covers standard test signals like impulse, step, ramp, and parabolic signals, alongside the time response components—transient and steady-state responses. The lecture also discusses first-order systems, including their transfer functions, gain, time constants, and relationships between impulse and step responses.