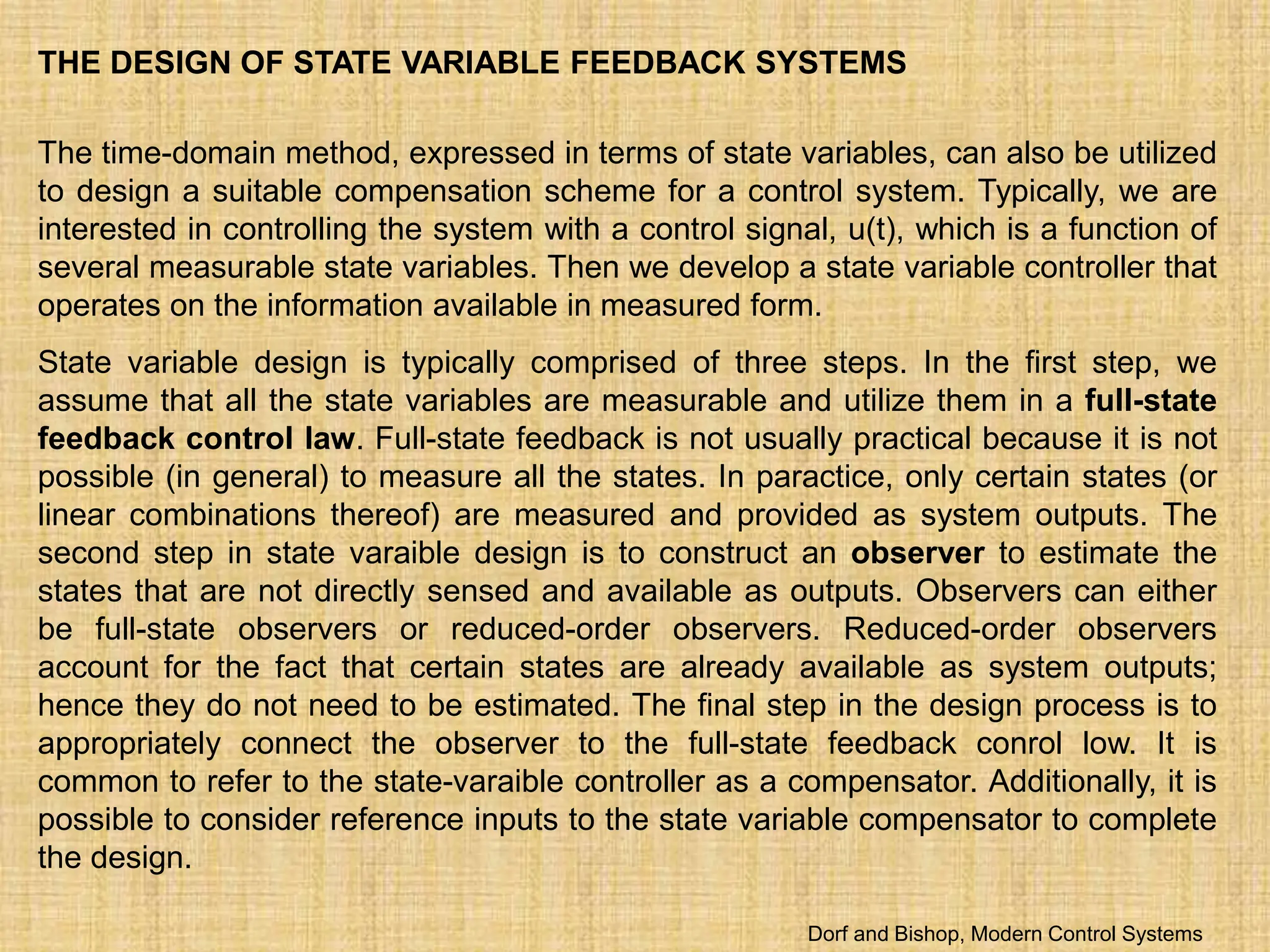
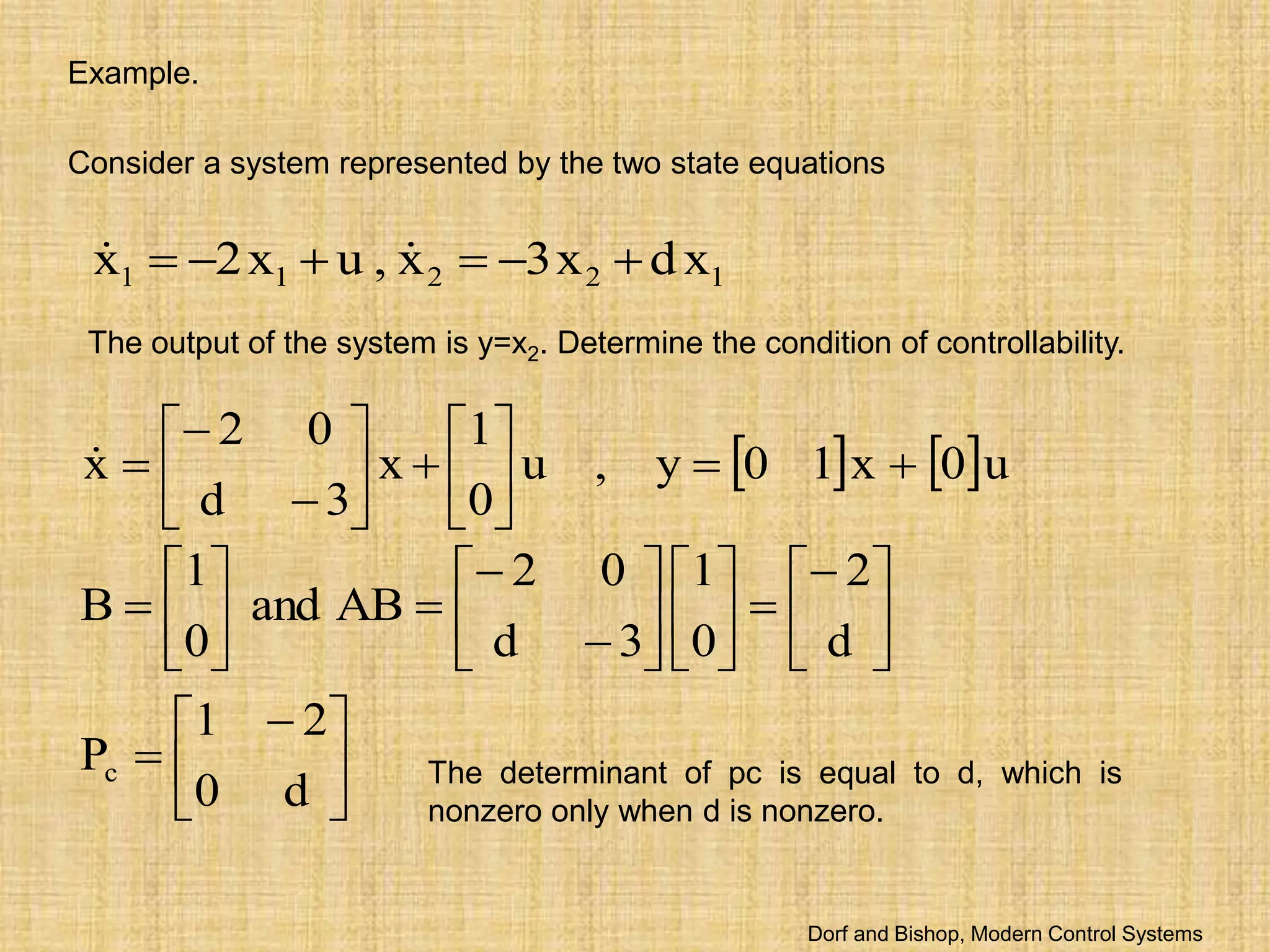
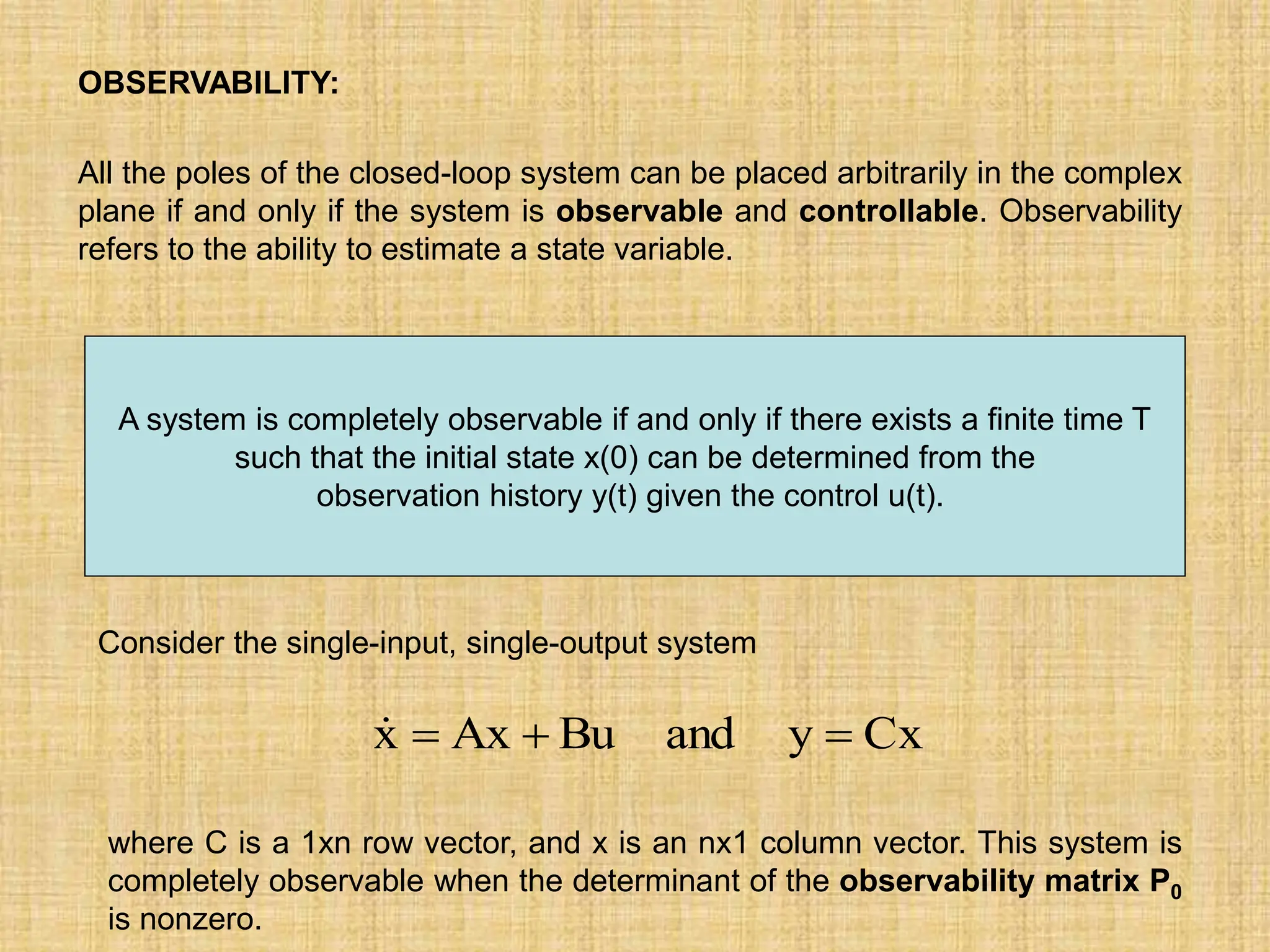
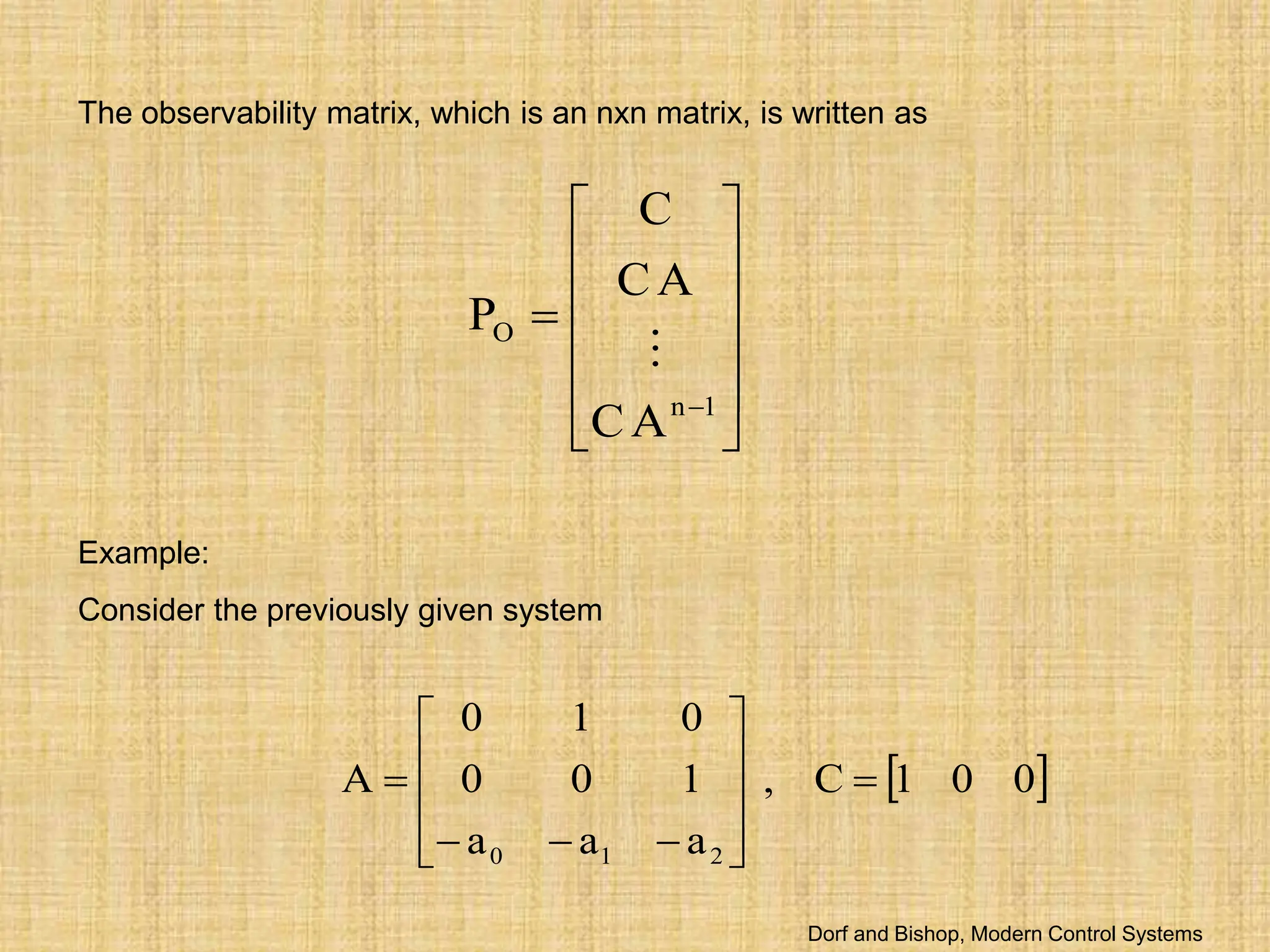
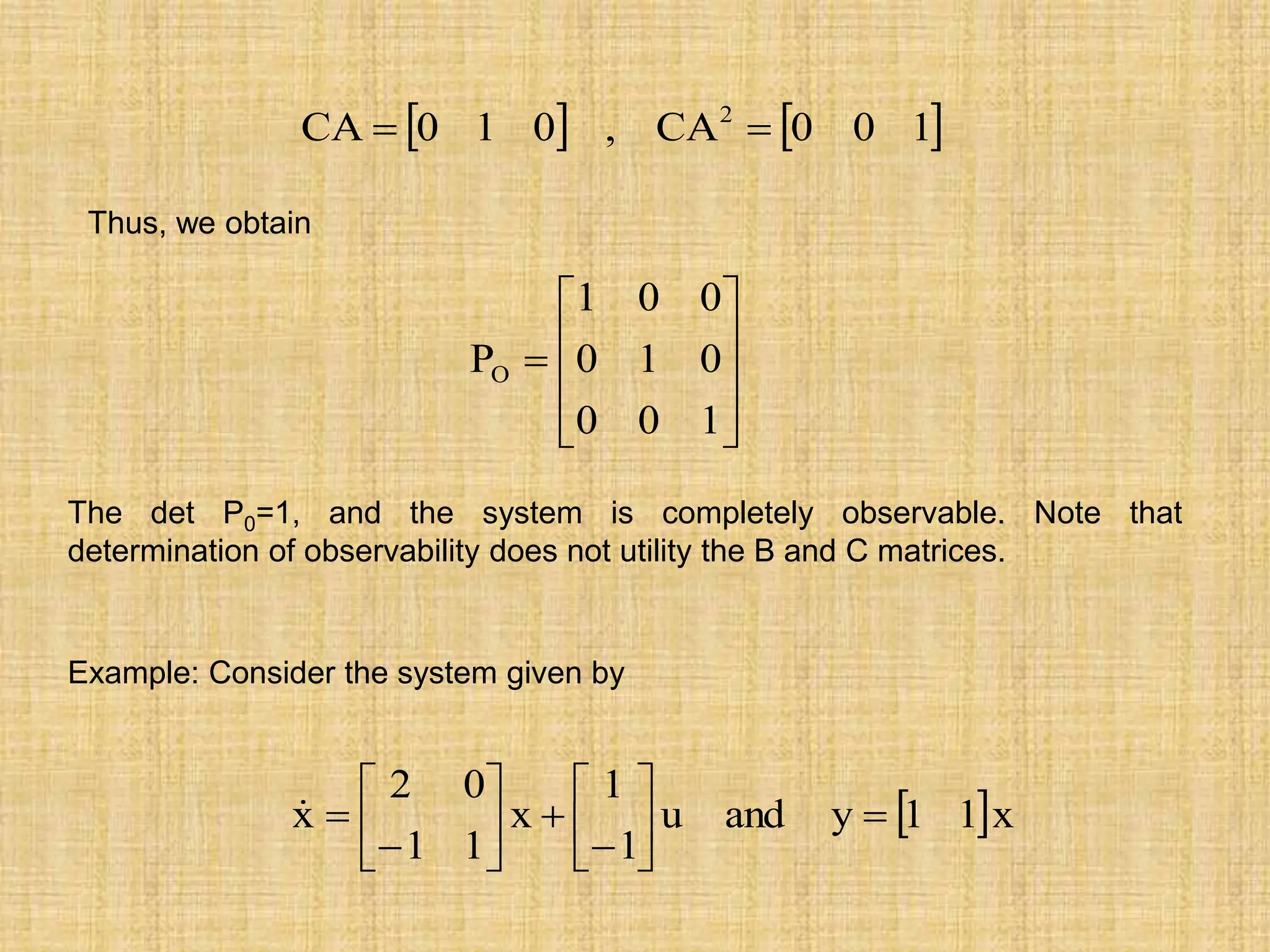
The document discusses state variable models for physical systems described by ordinary differential equations, demonstrating how to derive first-order equations and matrix forms suitable for computer analysis. It details the role of state variables in predicting the future state of a system based on current conditions and inputs, illustrating with examples such as spring-mass-damper systems and RLC circuits. The text emphasizes the usefulness of state-space representation in modern control systems, including transfer function derivation and analysis techniques using MATLAB.
![For a dynamic system, the state of a system is described in terms of a set of
state variables
)]
t
(
x
)
t
(
x
)
t
(
x
[ n
2
1
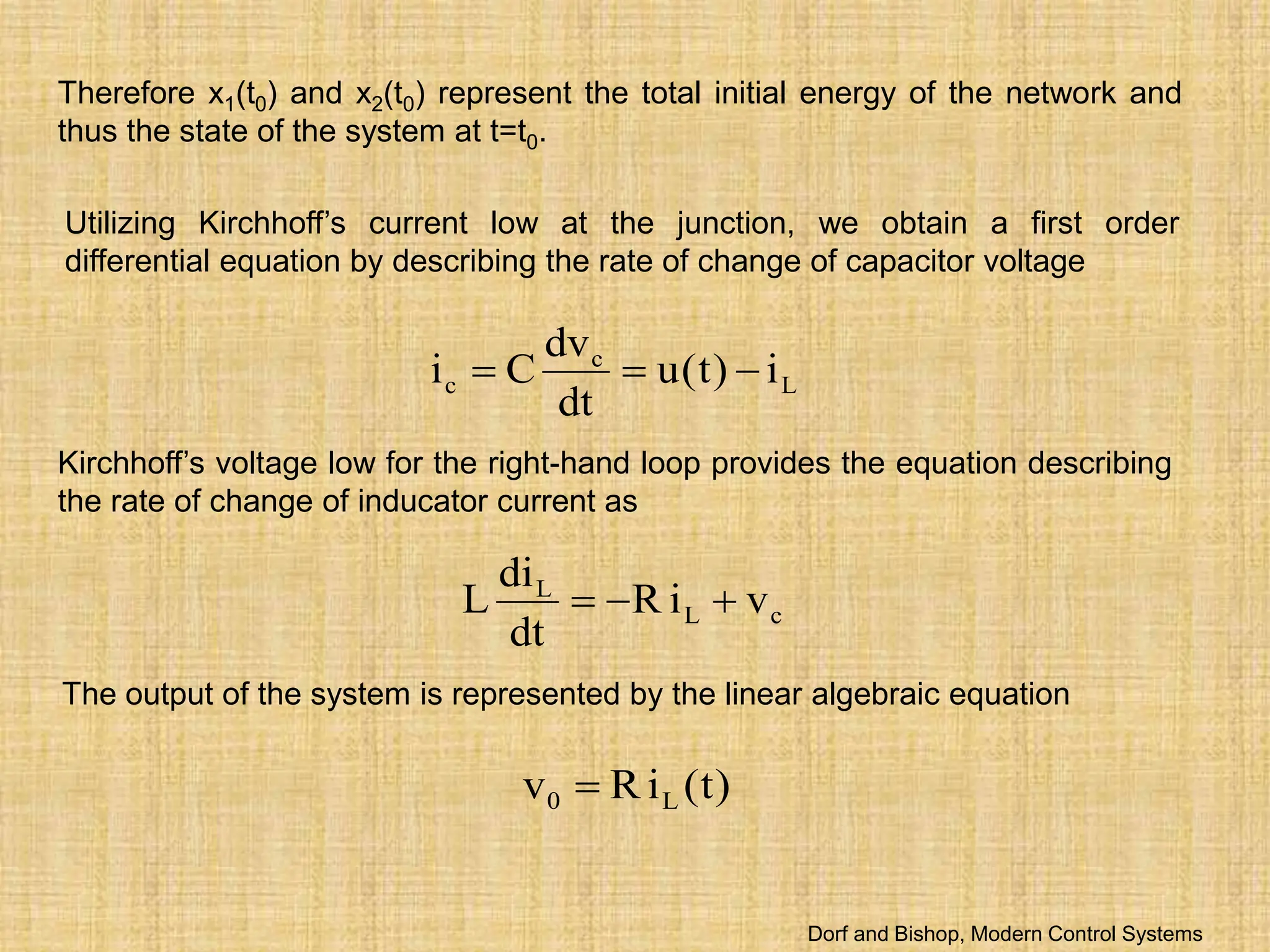
The state variables are those variables that determine the future behavior of
a system when the present state of the system and the excitation signals are
known. Consider the system shown in Figure 1, where y1(t) and y2(t) are the
output signals and u1(t) and u2(t) are the input signals. A set of state
variables [x1 x2 ... xn] for the system shown in the figure is a set such that
knowledge of the initial values of the state variables [x1(t0) x2(t0) ... xn(t0)] at
the initial time t0, and of the input signals u1(t) and u2(t) for t˃=t0, suffices to
determine the future values of the outputs and state variables.
System
Input Signals
u1(t)
u2(t)
Output Signals
y1(t)
y2(t)
System
u(t)
Input
x(0) Initial conditions
y(t)
Output
Figure 1. Dynamic system.](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-4-2048.jpg)
![dt
)
t
(
dy
)
t
(
x
)
t
(
y
)
t
(
x
2
1
y
y
c
y
)
t
(
u
W
,
y
k
2
1
E
,
y
m
2
1
E 2
2
2
1
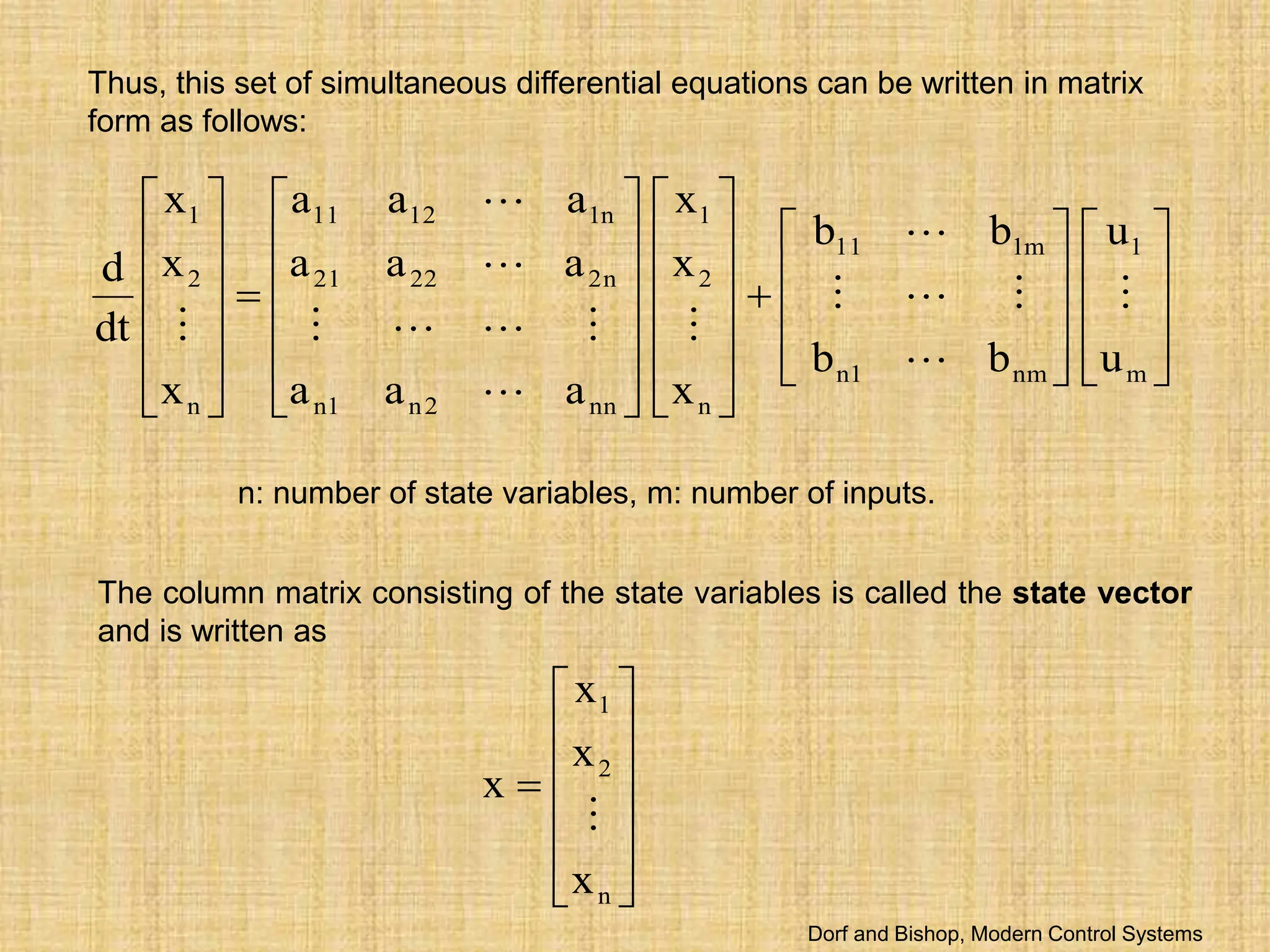
Kinetic and Potential energies, virtual work.
Therefore we will define a set of variables as [x1 x2], where
Lagrange’s equation
y
2
1
2
1
Q
y
E
E
y
E
E
dt
d
2
1 E
E
L
Lagrangian of the system is expressed as Generalized Force
)
(
)
(
1
2
2
2
2
t
u
x
k
x
c
dt
dx
m
t
u
y
k
dt
dy
c
dt
y
d
m
Equation of motion in terms of state variables.
We can write the equations that describe the behavior of the spring-mass-
damper system as the set of two first-order differential equations.](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-6-2048.jpg)
![)
t
(
u
m
1
x
m
k
x
m
c
dt
dx
x
dt
dx
1
2
2
2
1
This set of difefrential equations
describes the behavior of the state of
the system in terms of the rate of
change of each state variables.
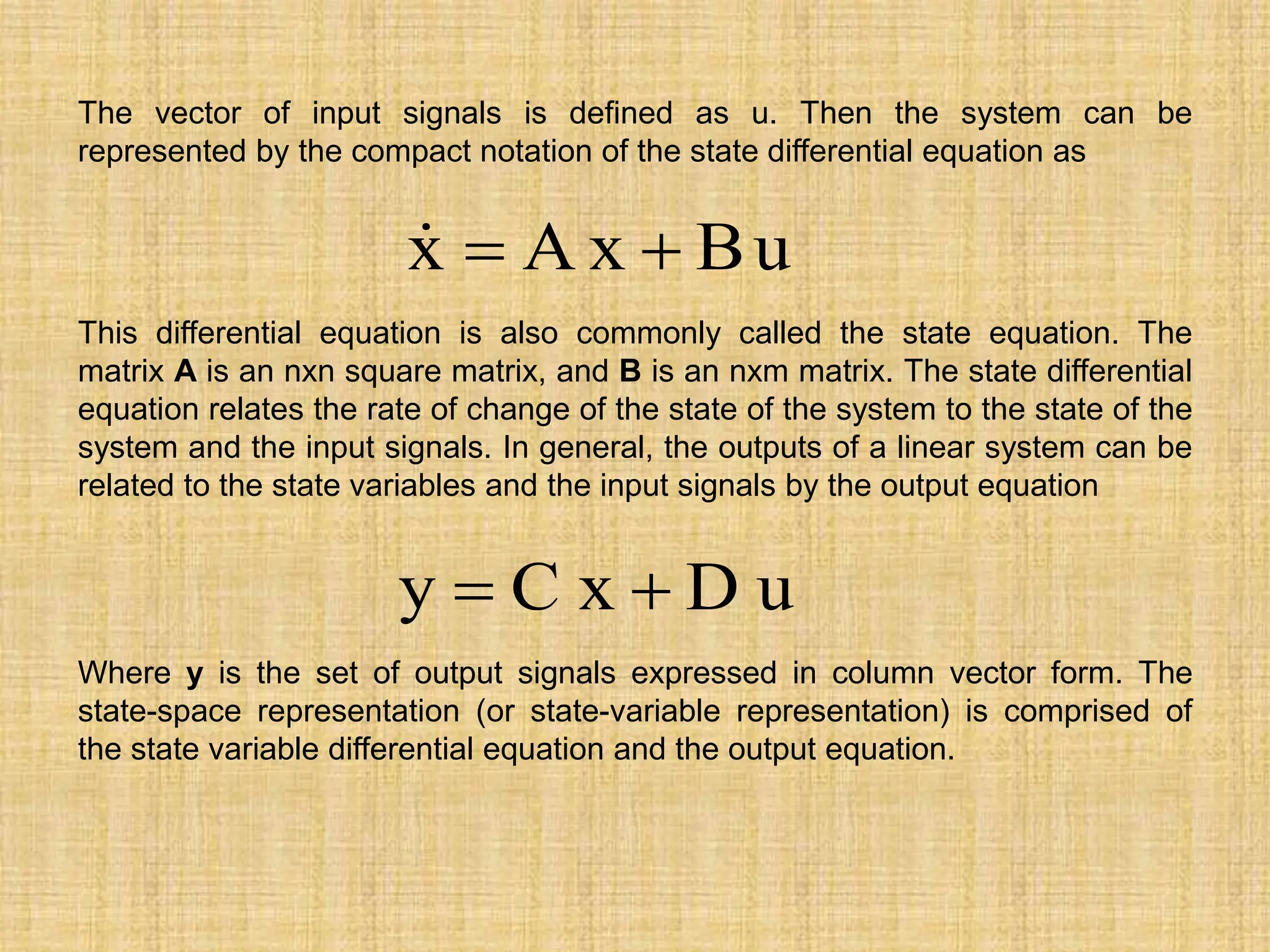
As another example of the state variable characterization of a system, consider the
RLC circuit shown in Figure 3.
u(t)
Current
source
L
C
R
Vc
Vo
iL
ic
2
c
2
c
2
2
L
1 v
C
2
1
dt
i
C
2
1
E
,
i
L
2
1
E
The state of this system can
be described in terms of a set
of variables [x1 x2], where x1
is the capacitor voltage vc(t)
and x2 is equal to the inductor
current iL(t). This choice of
state variables is intuitively
satisfactory because the
stored energy of the network
can be described in terms of
these variables.
Figure 3](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-7-2048.jpg)
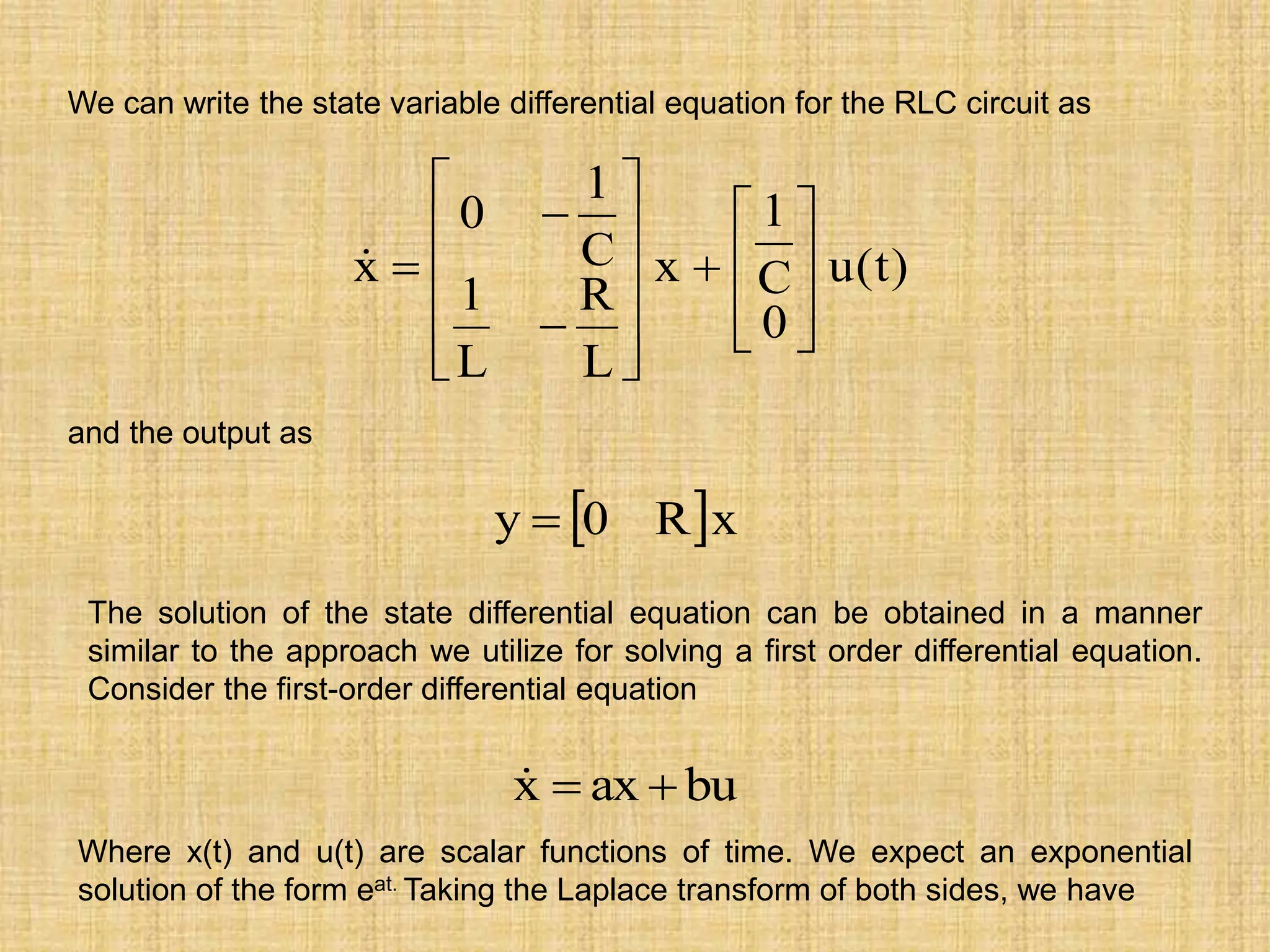
![We can write the equations as a set of two first order differential equations in
terms of the state variables x1 [vC(t)] and x2 [iL(t)] as follows:
2
1
2
2
1
x
L
R
x
L
1
dt
dx
)
t
(
u
C
1
x
C
1
dt
dx
L
c
i
)
t
(
u
dt
dv
C
c
L
L
v
i
R
dt
di
L
The output signal is then 2
0
1 x
R
)
t
(
v
)
t
(
y
Utilizing the first-order differential equations and the initial conditions of the
network represented by [x1(t0) x2(t0)], we can determine the system’s future
and its output.
The state variables that describe a system are not a unique set, and several
alternative sets of state variables can be chosen. For the RLC circuit, we
might choose the set of state variables as the two voltages, vC(t) and vL(t).](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-9-2048.jpg)
![In an actual system, there are several choices of a set of state variables that
specify the energy stored in a system and therefore adequately describe the
dynamics of the system.
The state variables of a system characterize the dynamic behavior of a
system. The engineer’s interest is primarily in physical, where the variables
are voltages, currents, velocities, positions, pressures, temperatures, and
similar physical variables.
The State Differential Equation:
The state of a system is described by the set of first-order differential
equations written in terms of the state variables [x1 x2 ... xn]. These first-
order differential equations can be written in general form as
m
nm
1
1
n
n
nn
2
2
n
1
1
n
n
m
m
2
1
21
n
n
2
2
22
1
21
2
m
m
1
1
11
n
n
1
2
12
1
11
1
u
b
u
b
x
a
x
a
x
a
x
u
b
u
b
x
a
x
a
x
a
x
u
b
u
b
x
a
x
a
x
a
x
](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-10-2048.jpg)
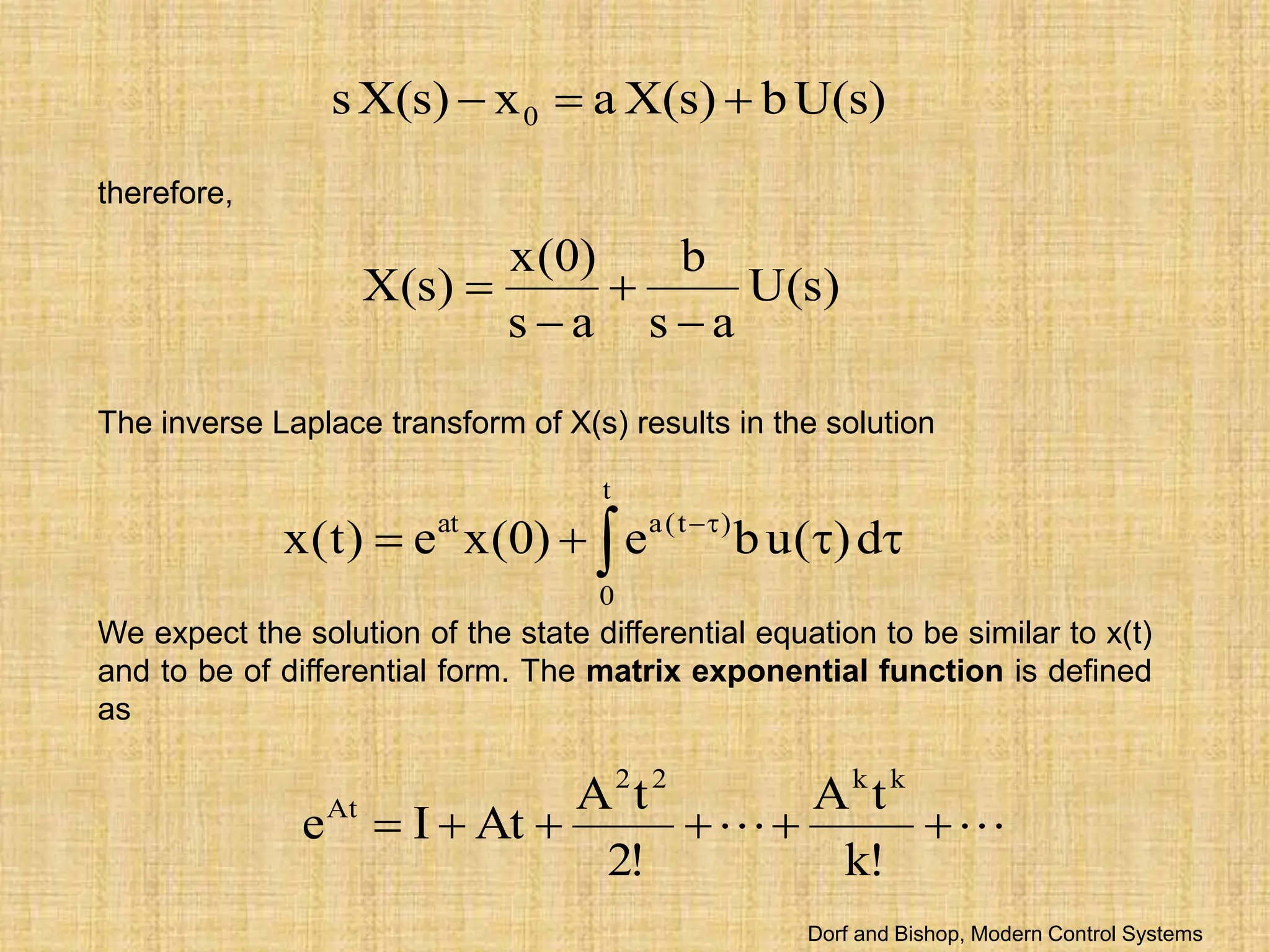
![which converges for all finite t and any A. Then the solution of the state
differential equation is found to be
)
s
(
U
B
A
sI
)
0
(
x
A
sI
)
s
(
X
d
)
(
u
B
e
)
0
(
x
e
)
t
(
x
1
1
t
0
)
t
(
A
At
where we note that [sI-A]-1=ϕ(s), which is the Laplace transform of ϕ(t)=eAt.
The matrix exponential function ϕ(t) describes the unforced response of
the system and is called the fundamental or state transition matrix.
t
0
d
)
(
u
B
)
t
(
)
0
(
x
)
t
(
)
t
(
x
Dorf and Bishop, Modern Control Systems](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-15-2048.jpg)
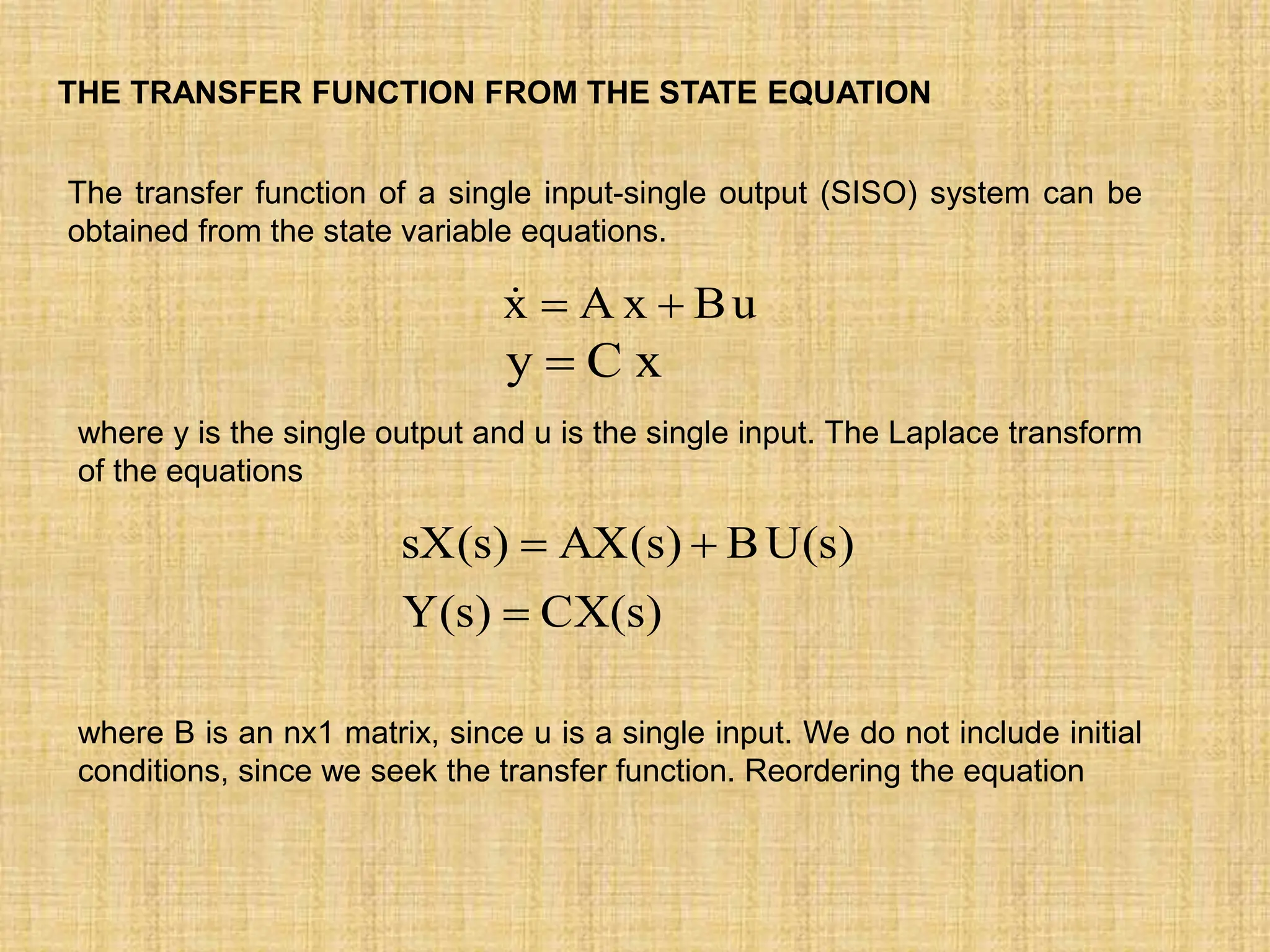
![
)
s
(
BU
)
s
(
C
)
s
(
Y
)
s
(
BU
)
s
(
)
s
(
BU
A
sI
)
s
(
X
)
s
(
U
B
)
s
(
X
]
A
sI
[
1
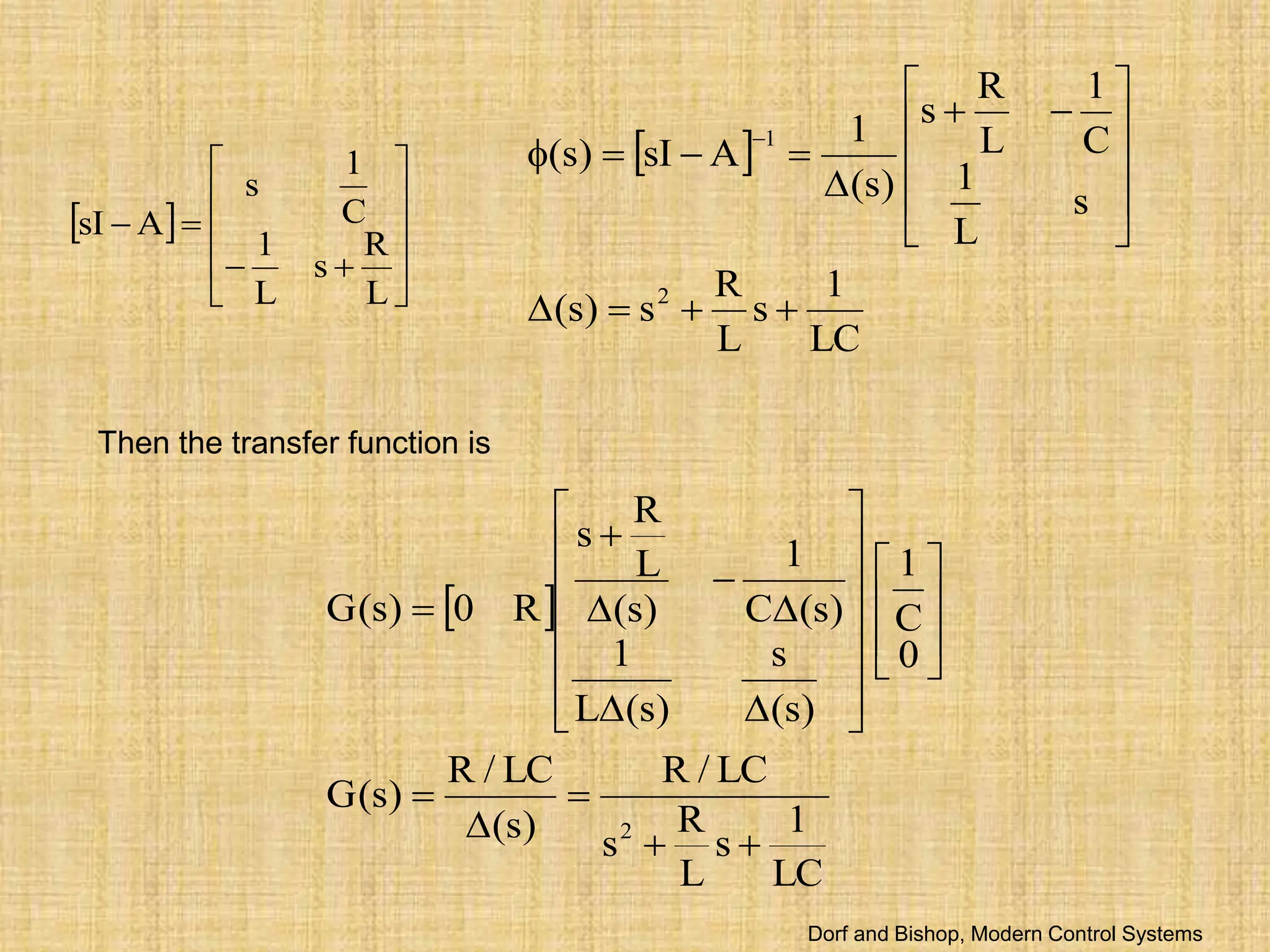
Therefore, the transfer function G(s)=Y(s)/U(s) is
B
)
s
(
C
)
s
(
G
Example:
Determine the transfer function G(s)=Y(s)/U(s) for the RLC circuit as described
by the state differential function
x
R
0
y
,
u
0
C
1
x
L
R
L
1
C
1
0
x
](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-17-2048.jpg)
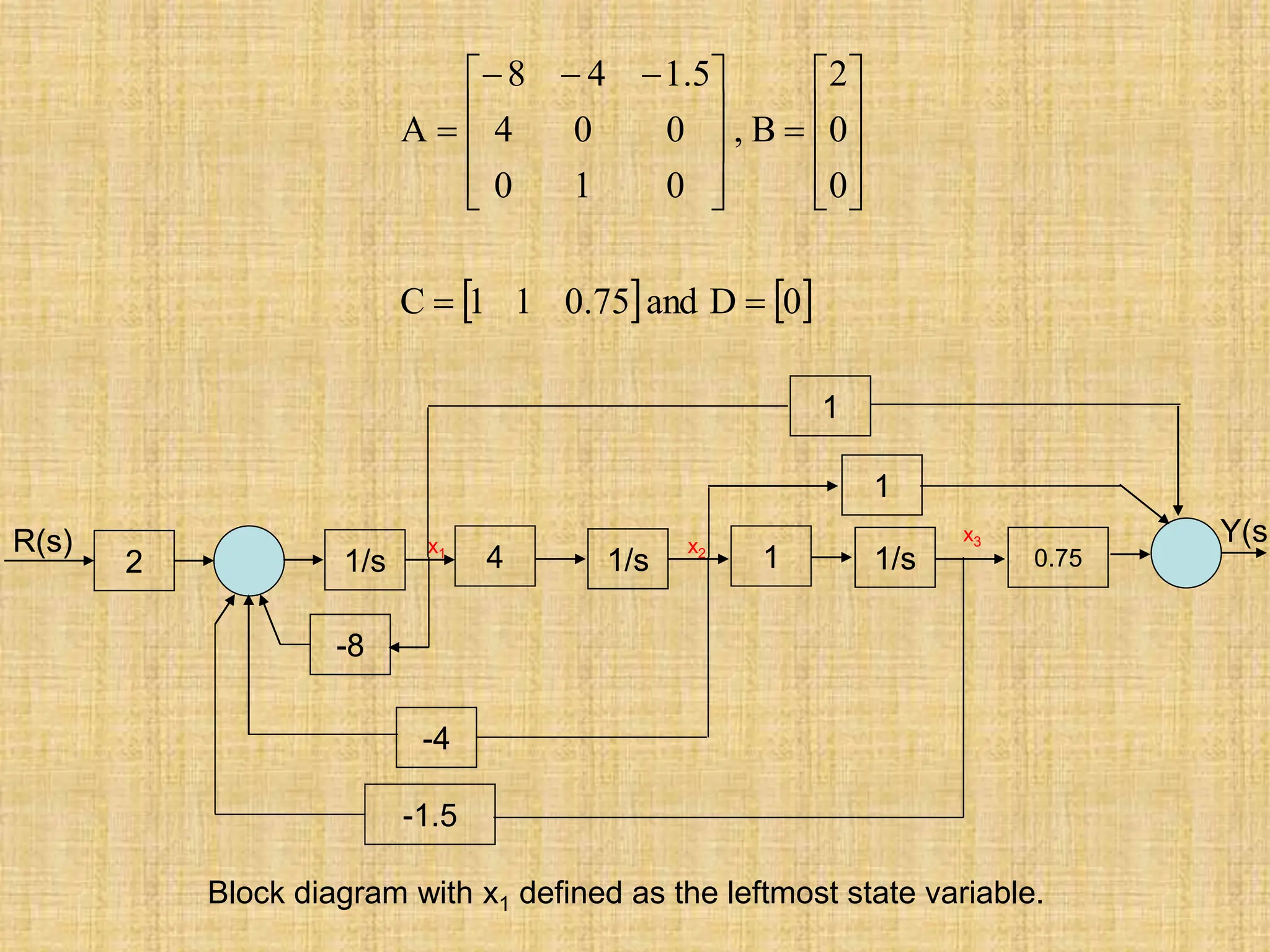
![For instance, consider the third-order system
6
s
16
s
8
s
6
s
8
s
2
)
s
(
R
)
s
(
Y
)
s
(
G 2
3
2
We can obtain a state-space representation using the ss function. The state-
space representation of the system given by G(s) is
num=[2 8 6];den=[1 8 16 6];
sys_tf=tf(num,den)
sys_ss=ss(sys_tf)
Matlab code Transfer function:
2 s^2 + 8 s + 6
----------------------
s^3 + 8 s^2 + 16 s + 6
a =
x1 x2 x3
x1 -8 -4 -1.5
x2 4 0 0
x3 0 1 0
b =
u1
x1 2
x2 0
x3 0
c =
x1 x2 x3
y1 1 1 0.75
d =
u1
y1 0
Continuous-time model.
Answer
0
D
and
75
.
0
1
1
C
0
0
2
B
,
0
1
0
0
0
4
5
.
1
4
8
A
](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-20-2048.jpg)
![We can use the function expm to compute the transition matrix for a given
time. The expm(A) function computes the matrix exponential. By contrast the
exp(A) function calculates ea
ij for each of the elements aijϵA.
t
0
)
t
(
A
At
d
)
(
u
B
e
)
0
(
x
e
)
t
(
x
t
0
d
)
(
u
B
)
t
(
)
0
(
x
)
t
(
)
t
(
x
For the RLC network, the state-space representation is given as:
0
D
and
0
1
C
,
0
2
B
,
3
1
2
0
A
The initial conditions are x1(0)=x2(0)=1 and the input u(t)=0. At t=0.2, the state
transition matrix is calculated as
>>A=[0 -2;1 -3], dt=0.2; Phi=expm(A*dt)
Phi =
0.9671 -0.2968
0.1484 0.5219](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-22-2048.jpg)
![The state at t=0.2 is predicted by the state transition method to be
6703
.
0
6703
.
0
x
x
5219
.
0
1484
.
0
2968
.
0
9671
.
0
x
x
0
t
2
1
2
.
0
t
2
1
The time response of a system can also be obtained by using lsim
function. The lsim function can accept as input nonzero initial conditions
as well as an input function. Using lsim function, we can calculate the
response for the RLC network as shown below.
t
u(t)
Du
Cx
y
Bu
Ax
x
System
Arbitrary Input Output
t
y(t)
y(t)=output response at t
T: time vector
X(t)=state response at t
t=times at which
response is
computed
Initial conditions
(optional)
u=input
[y,T,x]=lsim(sys,u,t,x0)
Dorf and Bishop, Modern Control Systems](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-23-2048.jpg)
![clc;clear
A=[0 -2;1 -3];B=[2;0];C=[1 0];D=[0];
sys=ss(A,B,C,D) %state-space model
x0=[1 1]; %initial conditions
t=[0:0.01:1];
u=0*t; %zero input
[y,T,x]=lsim(sys,u,t,x0);
subplot(211),plot(T,x(:,1))
xlabel('Time (seconds)'),ylabel('X_1')
subplot(212),plot(T,x(:,2))
xlabel('Time (seconds)'),ylabel('X_2')
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Time (seconds)
X
1
0 0.2 0.4 0.6 0.8 1
0
0.2
0.4
0.6
0.8
1
Time (seconds)
X
2
Matlab code
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
1
2
3
Time (seconds)
X
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.4
0.6
0.8
1
Time (seconds)
X
2
u=3*t
u=0*t
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
1
1.5
2
2.5
Time (seconds)
X
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0.7
0.8
0.9
1
Time (seconds)
X
2
u=3*exp(-2*t)](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-24-2048.jpg)
![
2
.
8
0
20000
20000
0
5
.
20
500
500
1
0
0
0
0
1
0
0
A
,
0
50
0
0
B
0 0.5 1 1.5
0
0.5
1
1.5
2
2.5
3
Time (seconds)
ydot
(m/s)
clc;clear
k=10;
M1=0.02;M2=0.0005;
b1=410e-3;b2=4.1e-3;
t=0:0.001:1.5;
A=[0 0 1 0;0 0 0 1;-k/M1 k/M1 -
b1/M1 0;k/M2 -k/M2 0 -b2/M2];
B=[0;0;1/M1;0];C=[0 0 0 1];D=[0];
sys=ss(A,B,C,D)
y=step(sys,t);
plot(t,y);grid
xlabel('Time
(seconds)'),ylabel('ydot (m/s)')
Velocity of Mass 2 (Head)
Dorf and Bishop, Modern Control Systems
k=10 N/m](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-27-2048.jpg)
![The controllability matrix Pc can be constructed in Matlab by using ctrb
command.
2
.
8
0
20000
20000
0
5
.
20
500
500
1
0
0
0
0
1
0
0
A
,
0
50
0
0
B
From two-mass system,
Pc =
1.0e+007 *
0 0.0000 -0.0001 -0.0004
0 0 0 0.1000
0.0000 -0.0001 -0.0004 0.0594
0 0 0.1000 -2.8700
rank_Pc =
4
det_Pc =
-2.5000e+015
clc
clear
A=[0 0 1 0;0 0 0 1;-500 500 -20.5
0;20000 -20000 0 -8.2];
B=[0;0;50;0];
Pc=ctrb(A,B)
rank_Pc=rank(Pc)
det_Pc=det(Pc)
The system is
controllable.](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-34-2048.jpg)
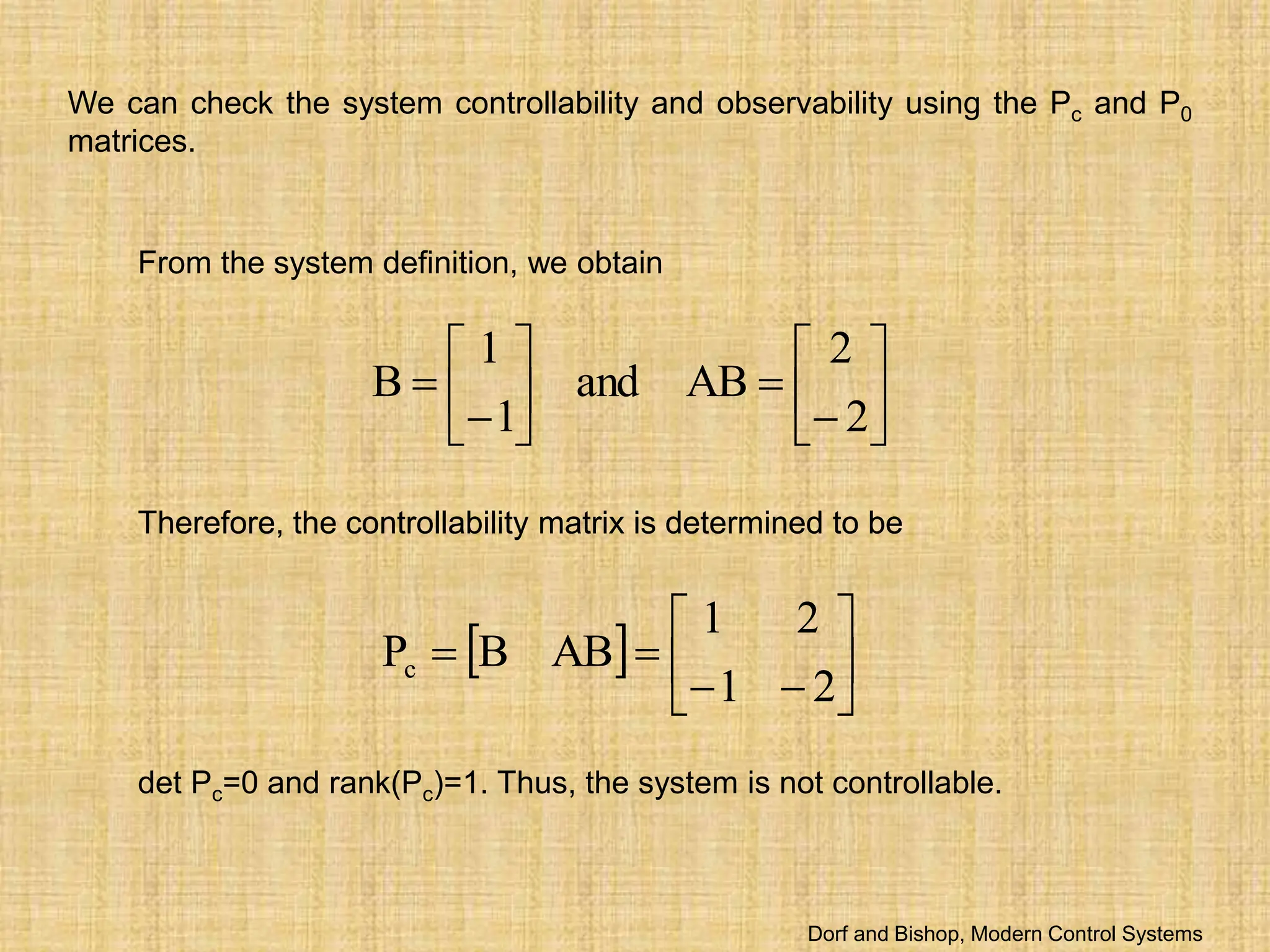
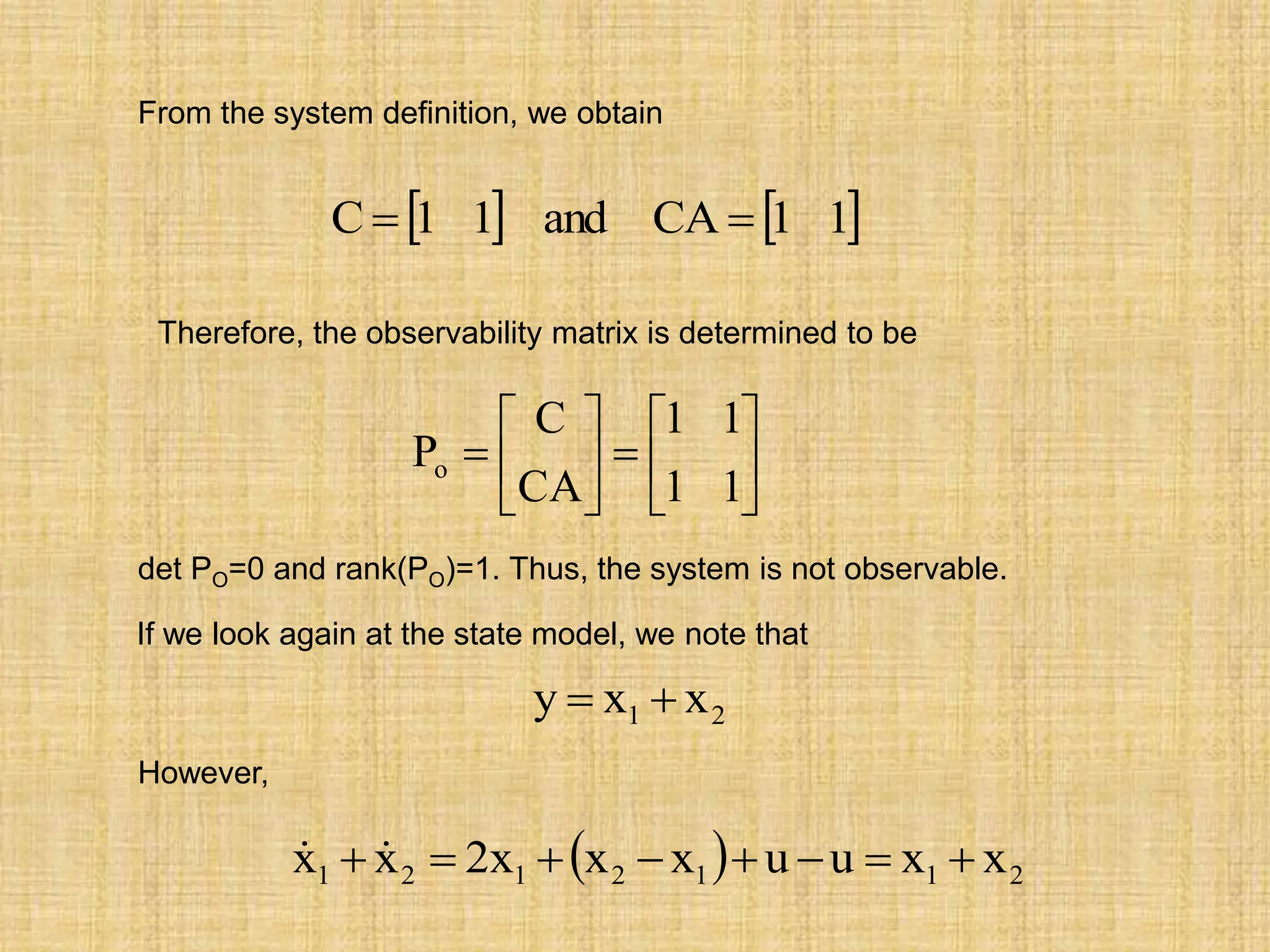
![Thus, the system state variables do not depend on u, and the system is not
controllable. Similarly, the output (x1+x2) depends on x1(0) plus x2(0) and does
not allow us to determine x1(0) and x2(0) independently. Consequently, the
system is not observable.
The observability matrix PO can be constructed in Matlab by using obsv
command.
From two-mass system,
Po =
1 1
1 1
rank_Po =
1
det_Po =
0
clc
clear
A=[2 0;-1 1];
C=[1 1];
Po=obsv(A,C)
rank_Po=rank(Po)
det_Po=det(Po) The system is not
observable.
Dorf and Bishop, Modern Control Systems](https://image.slidesharecdn.com/lecture111-240228110112-5df5c455/75/lecture1ddddgggggggggggghhhhhhh-11-ppt-40-2048.jpg)














































![[BROCHURE] Italy Tour Project | @SlideON](https://cdn.slidesharecdn.com/ss_thumbnails/brochure8-251215152319-2805af68-thumbnail.jpg?width=640&height=640&fit=bounds)


















