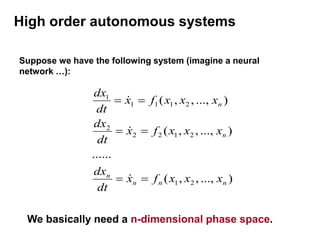
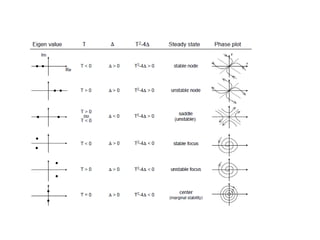
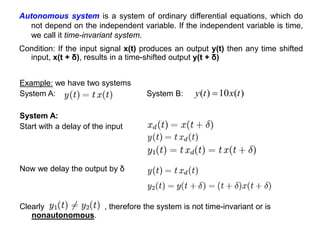
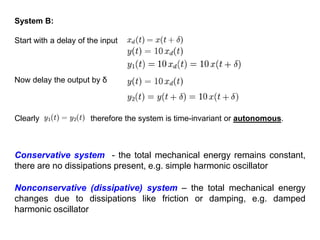
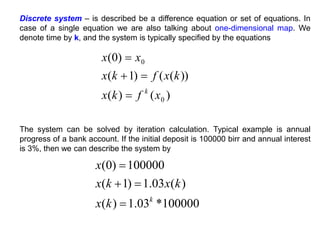
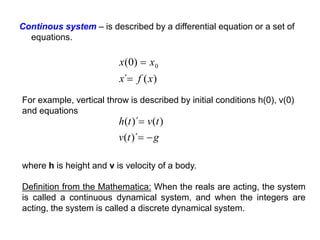
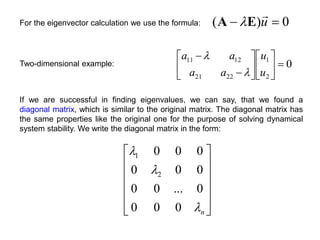
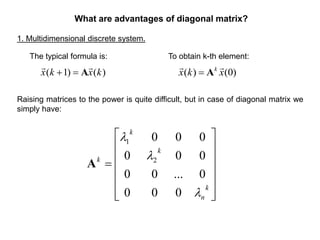
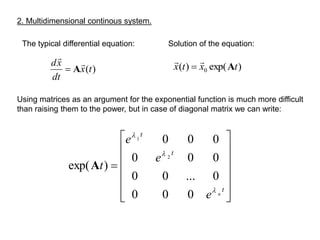
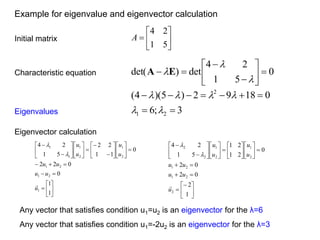
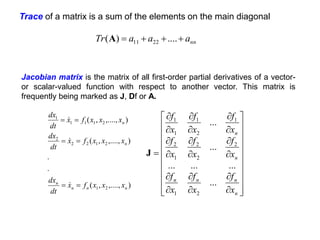
This document defines and describes dynamical systems. It begins by defining a dynamical system as a system that changes over time according to fixed rules determining how its states change. It then describes the two main parts of a dynamical system: (1) a state vector describing the system's current state, and (2) a function determining the next state. Dynamical systems can be classified as linear/nonlinear, autonomous/nonautonomous, conservative/nonconservative, discrete/continuous, and one-dimensional/multidimensional. The document provides examples of classifying systems and calculating eigenvalues and eigenvectors. It discusses how diagonalizing a matrix simplifies solving dynamical systems.
![A state vector can be described by
)]
(
),......,
(
),
(
[
)
( 2
1 t
x
t
x
t
x
t
x n
)
,....,
,
(
),....,
,....,
,
(
),
,....,
,
( 2
1
2
1
2
2
1
1 n
n
n
n x
x
x
f
x
x
x
f
x
x
x
f
)
,....,
,
(
.
.
)
,....,
,
(
)
,....,
,
(
2
1
2
1
2
2
2
2
1
1
1
1
n
n
n
n
n
n
x
x
x
f
x
dt
dx
x
x
x
f
x
dt
dx
x
x
x
f
x
dt
dx
A function can be described by a single function or by a set of functions
Entire system can be then described by a set of differential equations – equations
of motion](https://image.slidesharecdn.com/introclass-230503111804-94080088/85/Intro-Class-ppt-3-320.jpg)
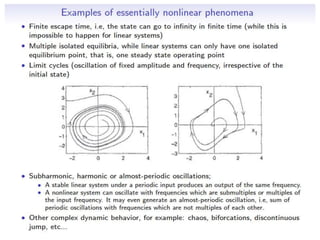
![Creating a phase portrait of a damped oscillator in Matlab
function [t,y] = oscil(delta)
tspan=[0,7];
init=[1;0];
omega=10;
[t,y]=ode45(@f,tspan,init);
plot(y(:,1),y(:,2));
%Creation of graph description.
xlabel('displacement [m]')
ylabel('velocity [m/s]')
title('A damped harmonic oscillator');
axis([-1 1 -10 10]);
function yprime=f(t,y)
yprime=zeros(2,1);
yprime(1)=y(2);
yprime(2)=-2*delta*y(2)-omega^2*y(1);
end
clc
end
y
y
y
y
y
y
2
2
2
0
2
y
y
y
y
2
1
y
y
y
y
y
y
2
2
1
2
0
)
0
(
)
0
(
1
)
0
(
)
0
(
2
1
y
y
y
y
1
2
2
2
2
1
2 y
y
y
y
y
](https://image.slidesharecdn.com/introclass-230503111804-94080088/85/Intro-Class-ppt-26-320.jpg)