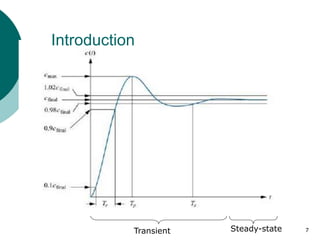
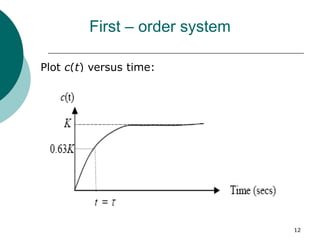
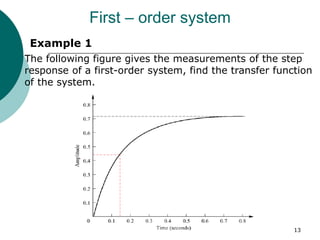
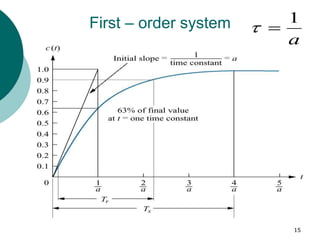
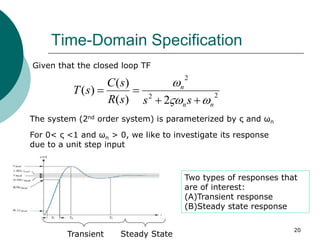
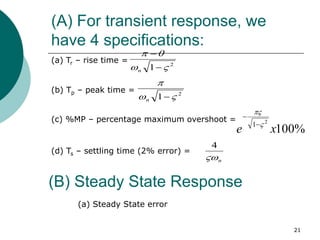
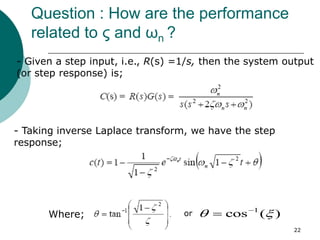
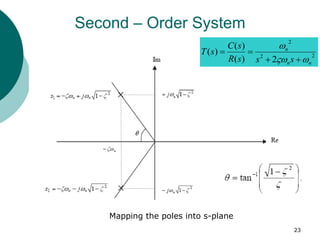
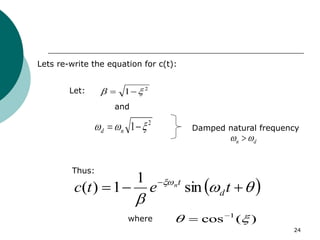
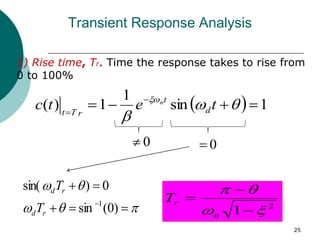
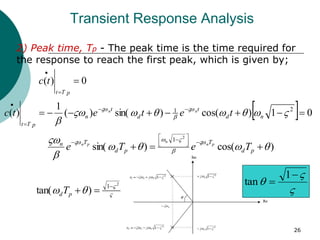
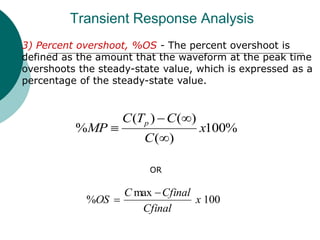
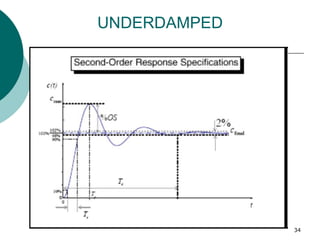
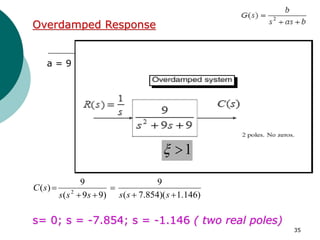
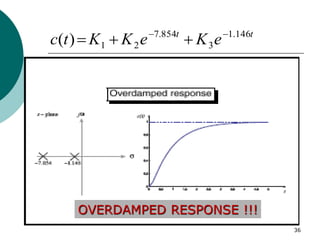
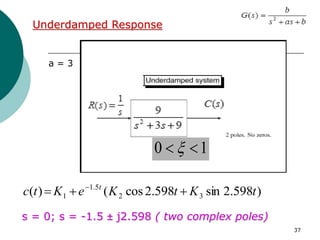
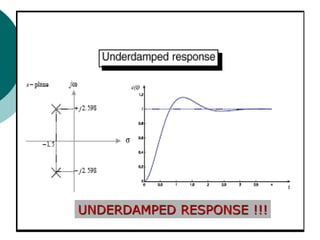
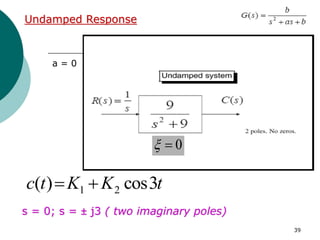
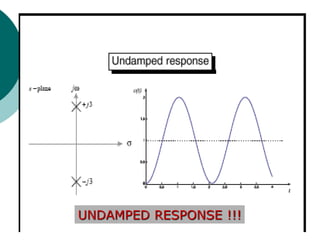
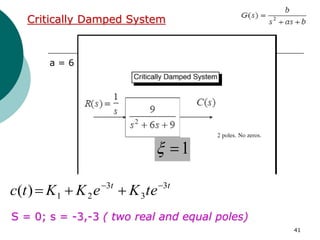
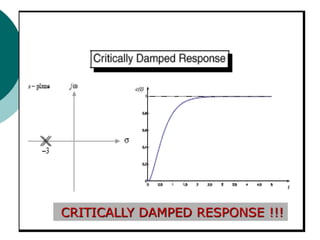
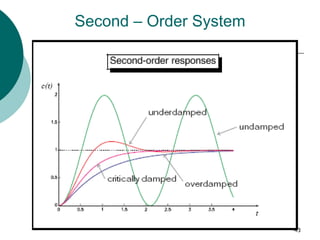
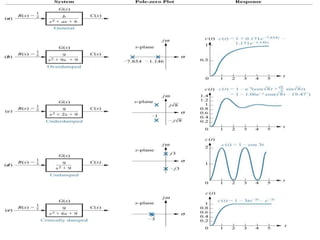
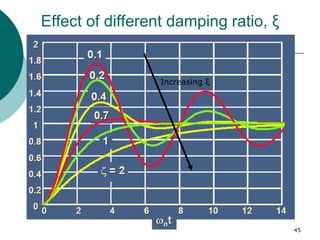
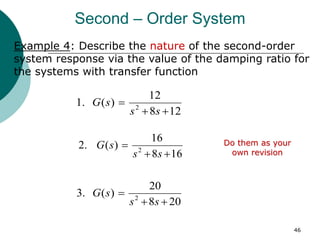
This document discusses transient and steady state response analysis of first and second order systems. It begins by defining transient response as the system response from the initial to final state, and steady state response as the system output behavior as time approaches infinity after the transient response decays. For first order systems, it derives the step response and defines the time constant. For second order systems, it discusses the different response types based on the damping ratio and derives expressions for transient response specifications like rise time, peak time, and settling time in terms of the damping ratio and natural frequency.