This document introduces linear time-varying (LTV) systems and the computation of the state transition matrix (STM) for LTV systems. It discusses:
1) The definition and properties of the STM for LTV systems.
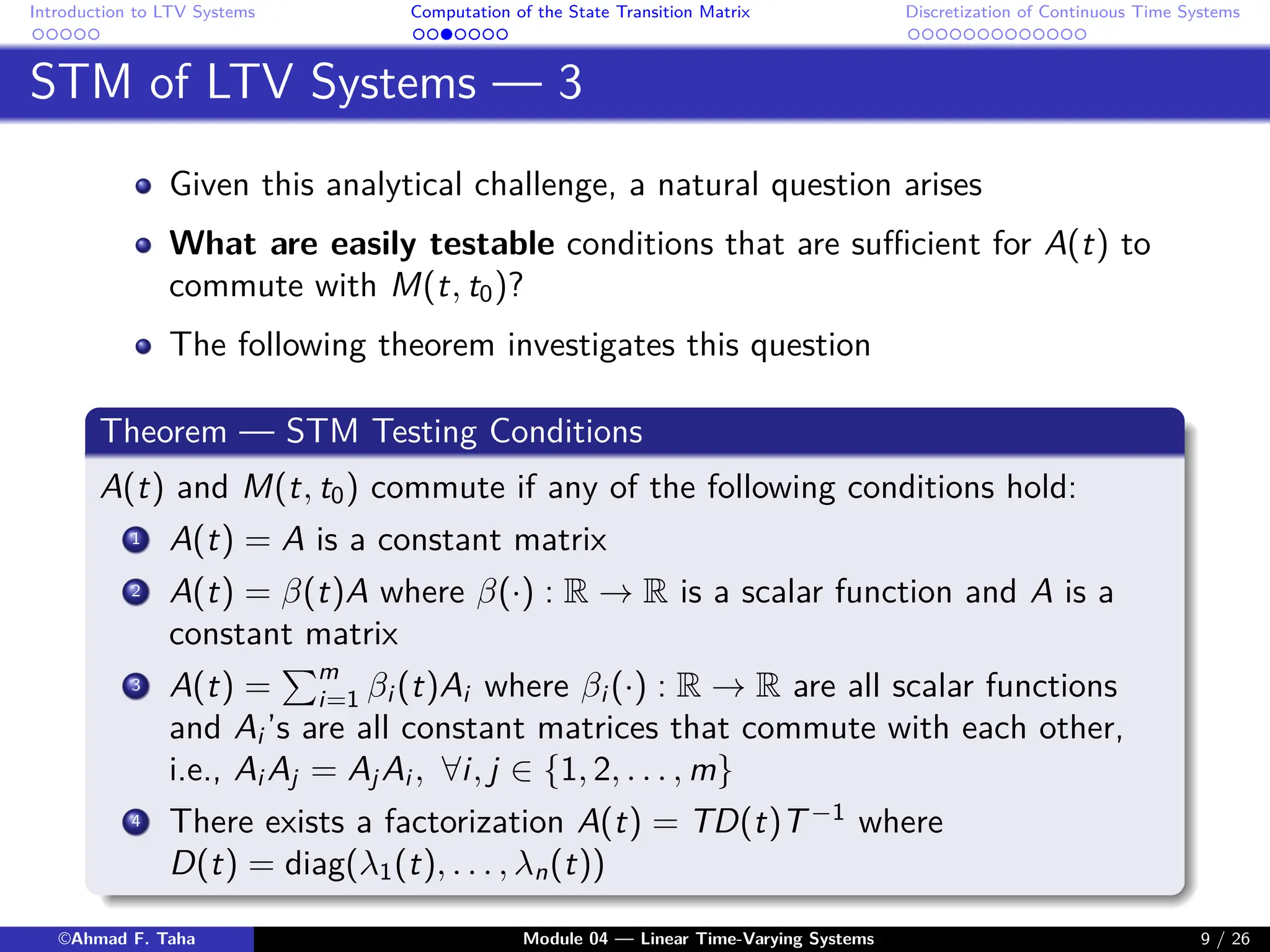
2) Conditions under which the system matrix A(t) commutes with the integral of A(t), which is required to compute the STM.
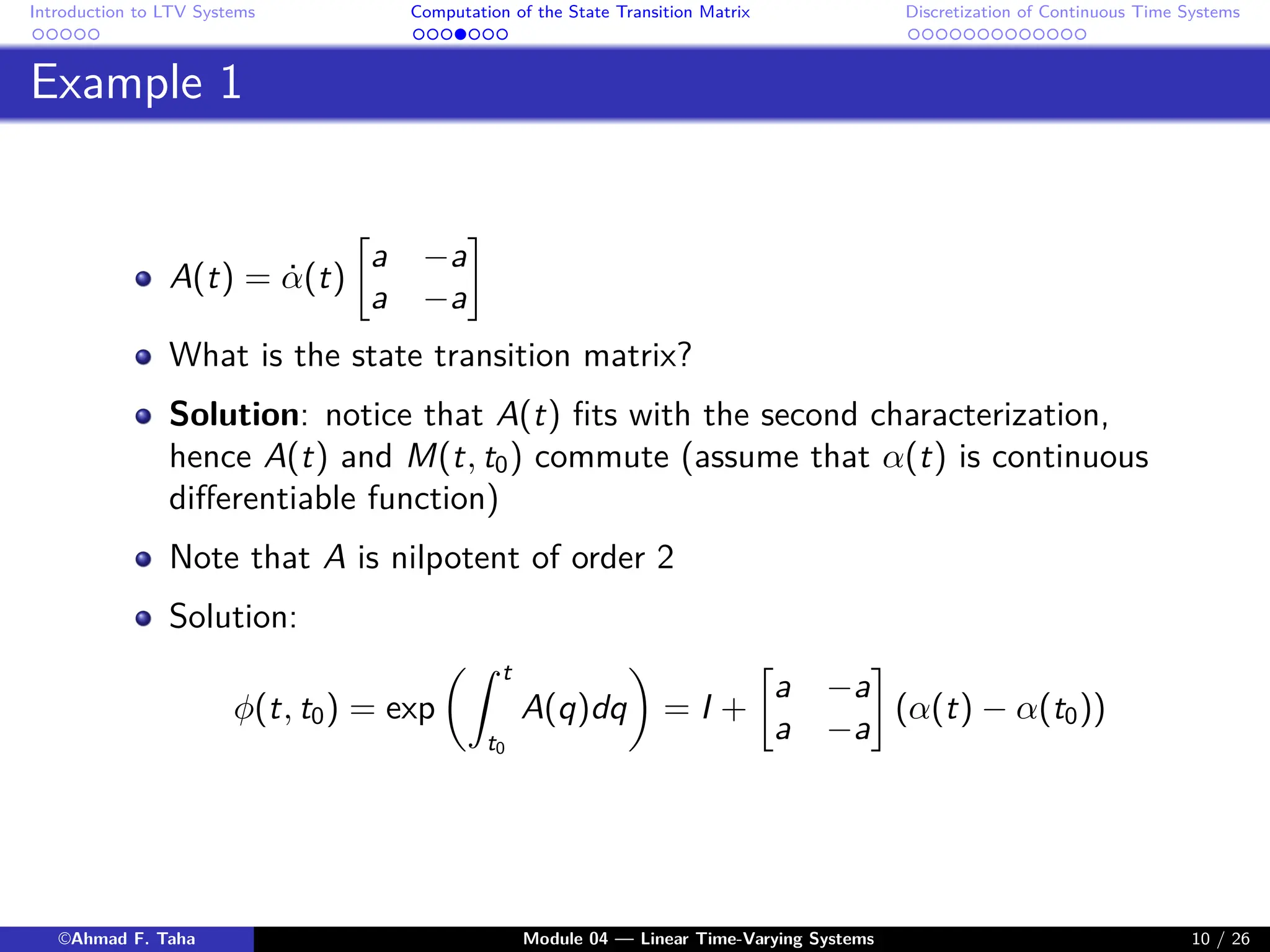
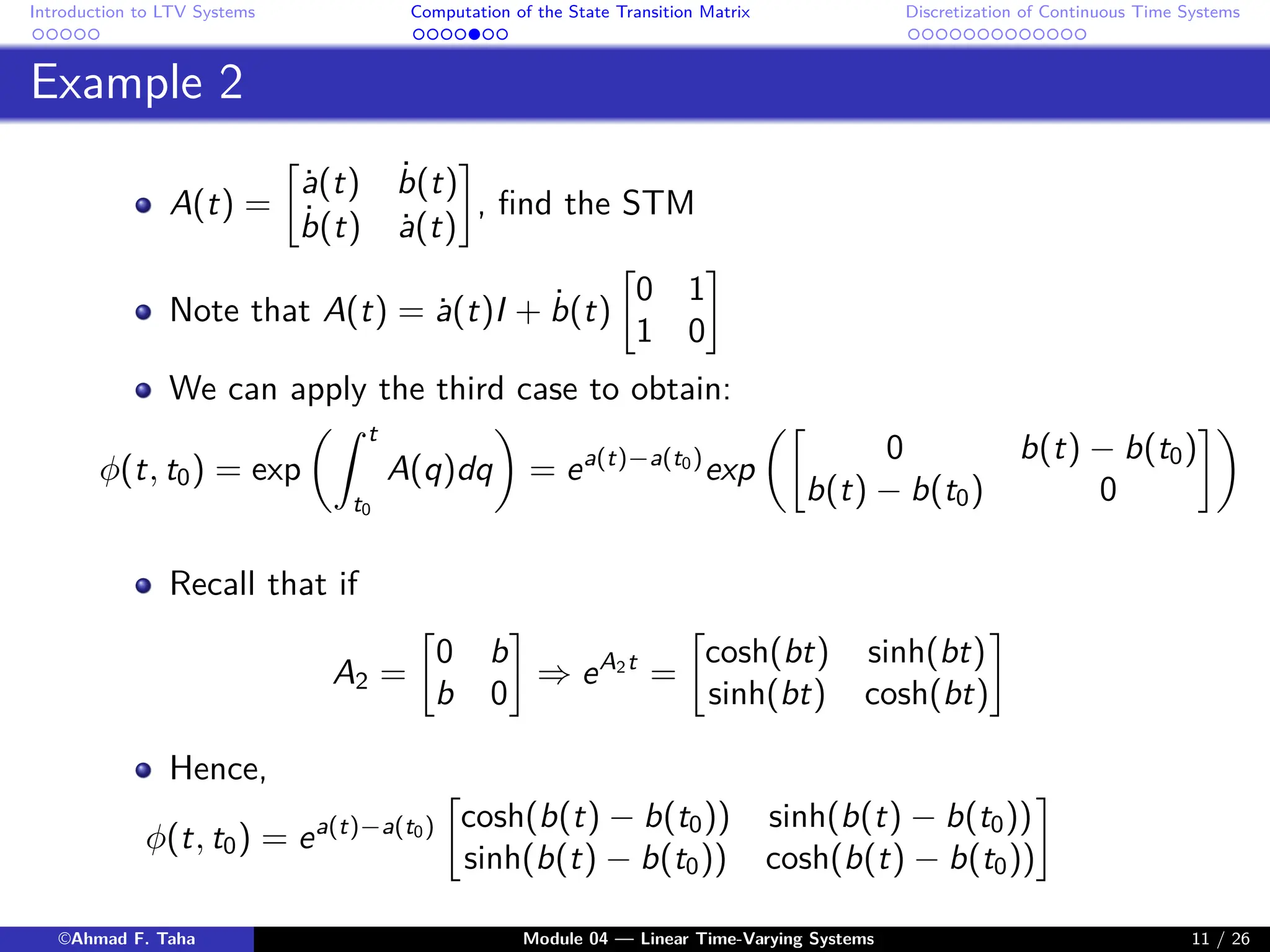
3) Examples of computing the STM for different time-varying system matrices.
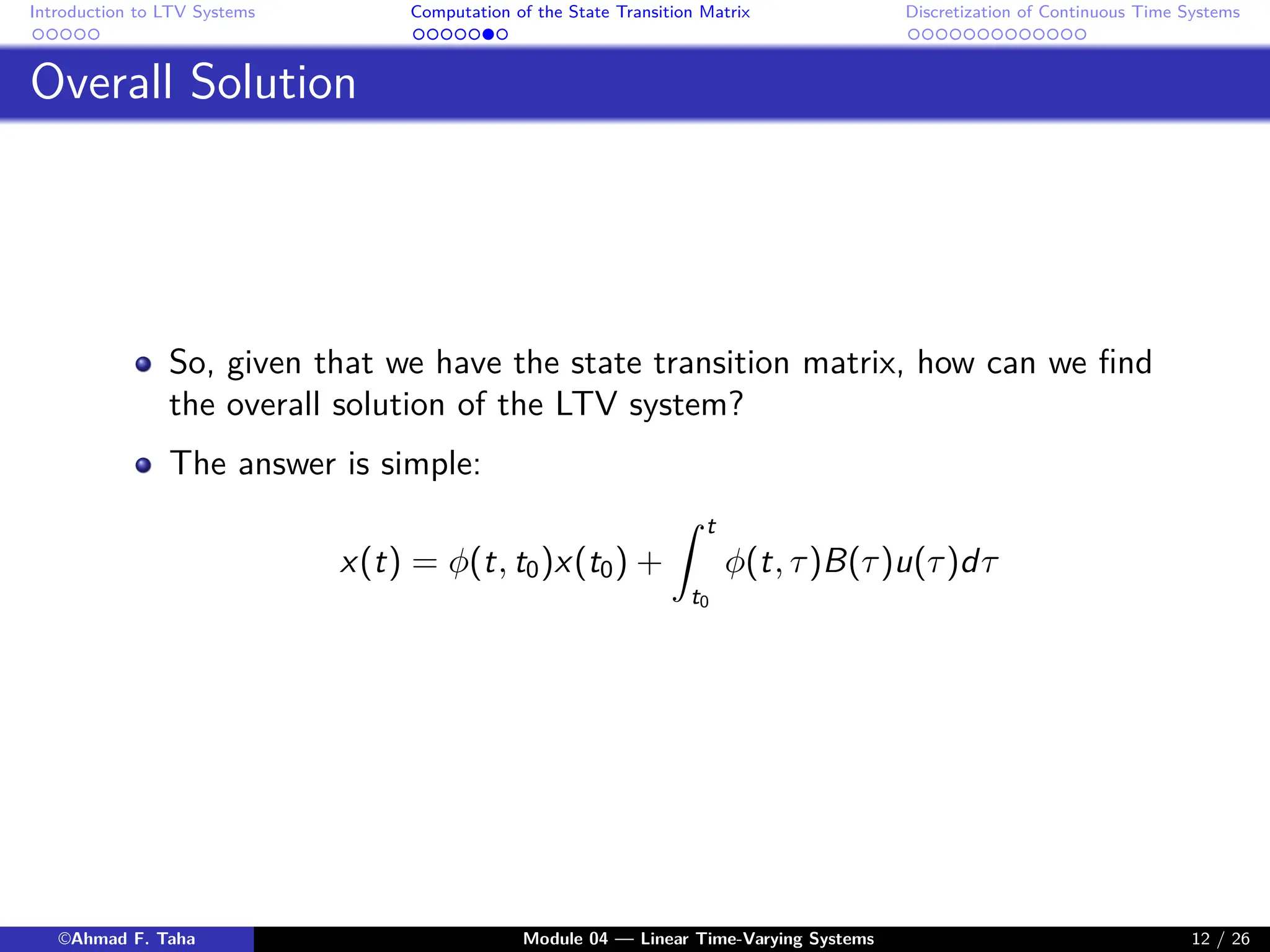
4) How to obtain the overall state solution for an LTV system given its STM.
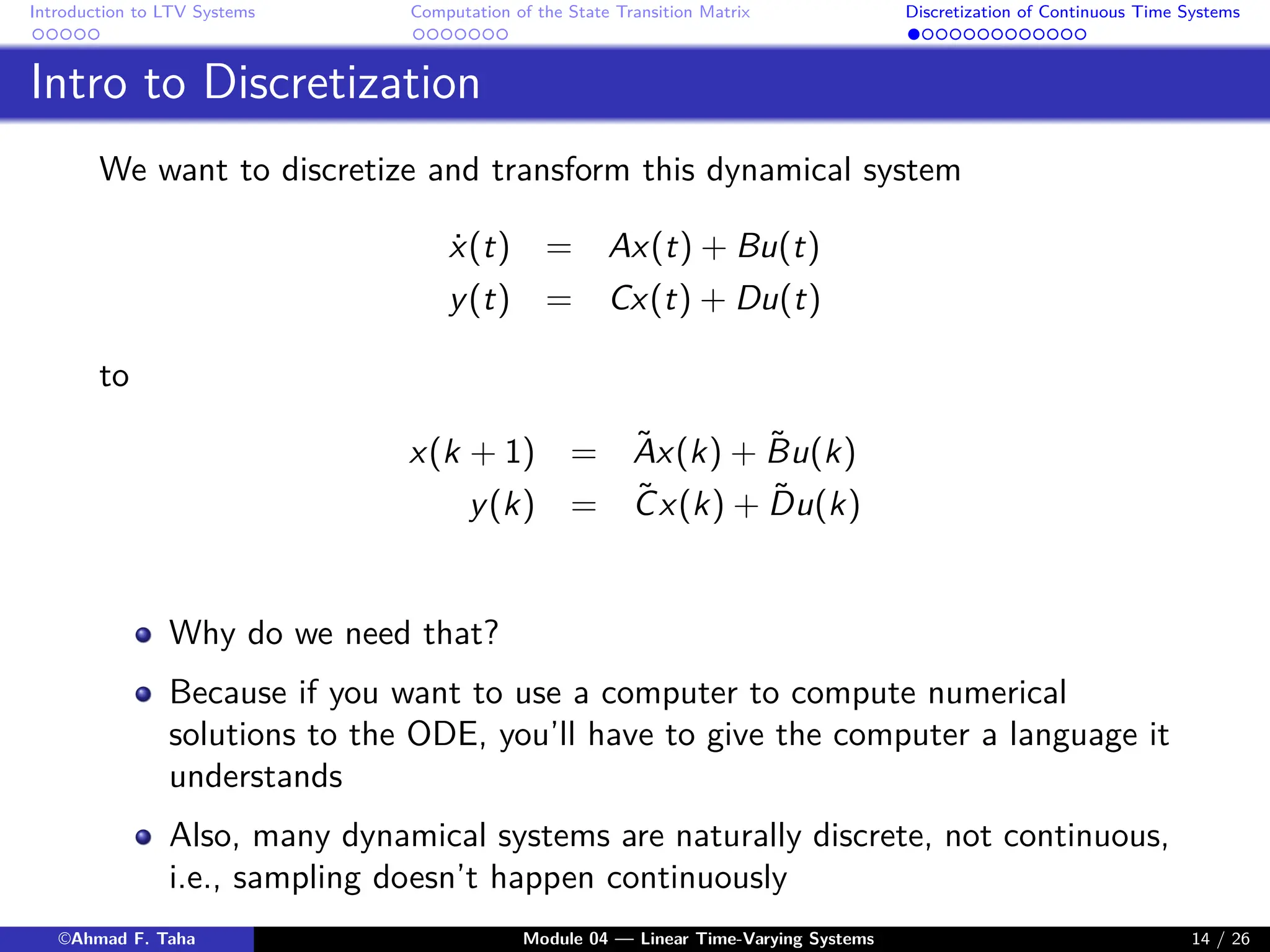
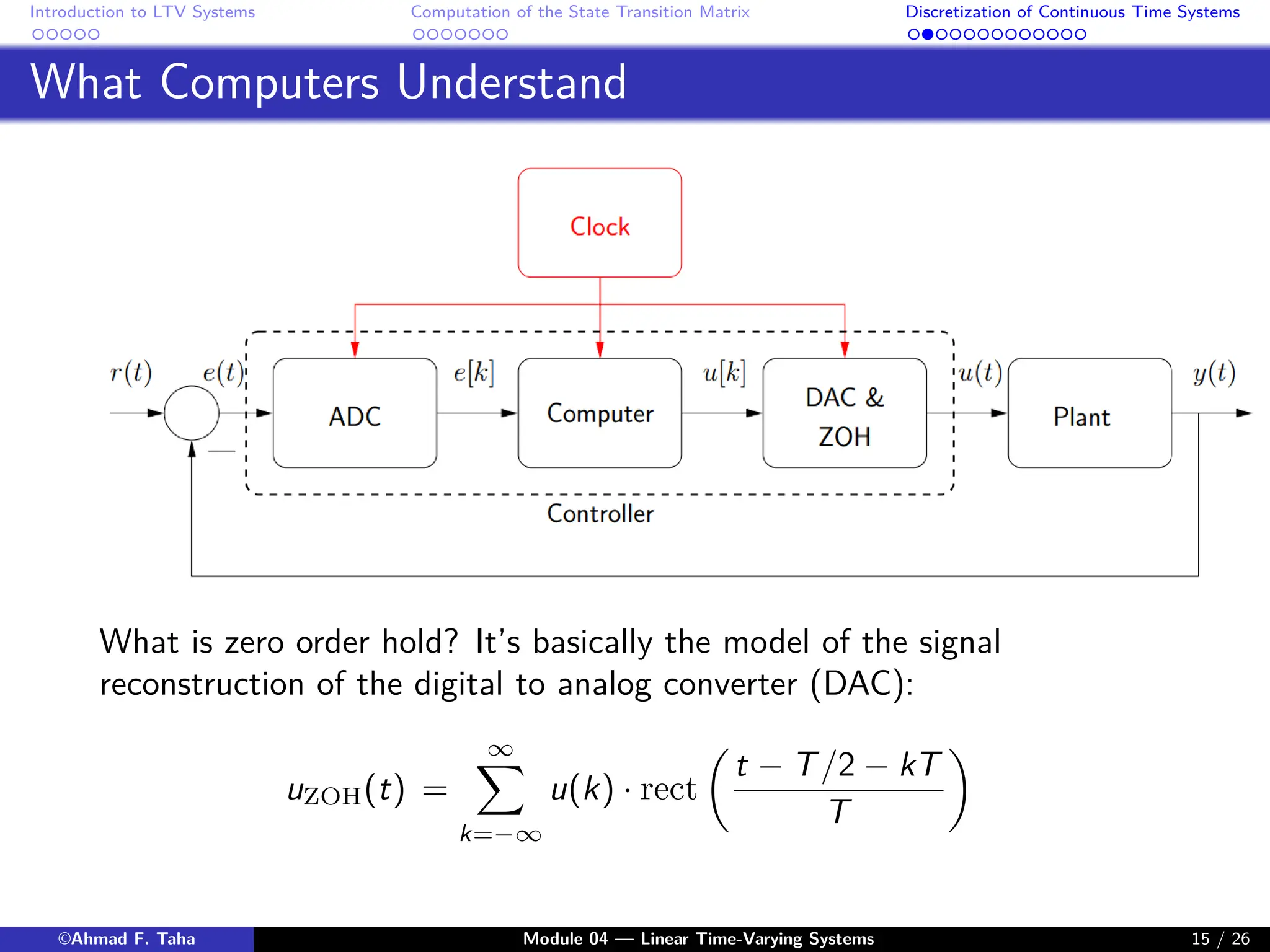
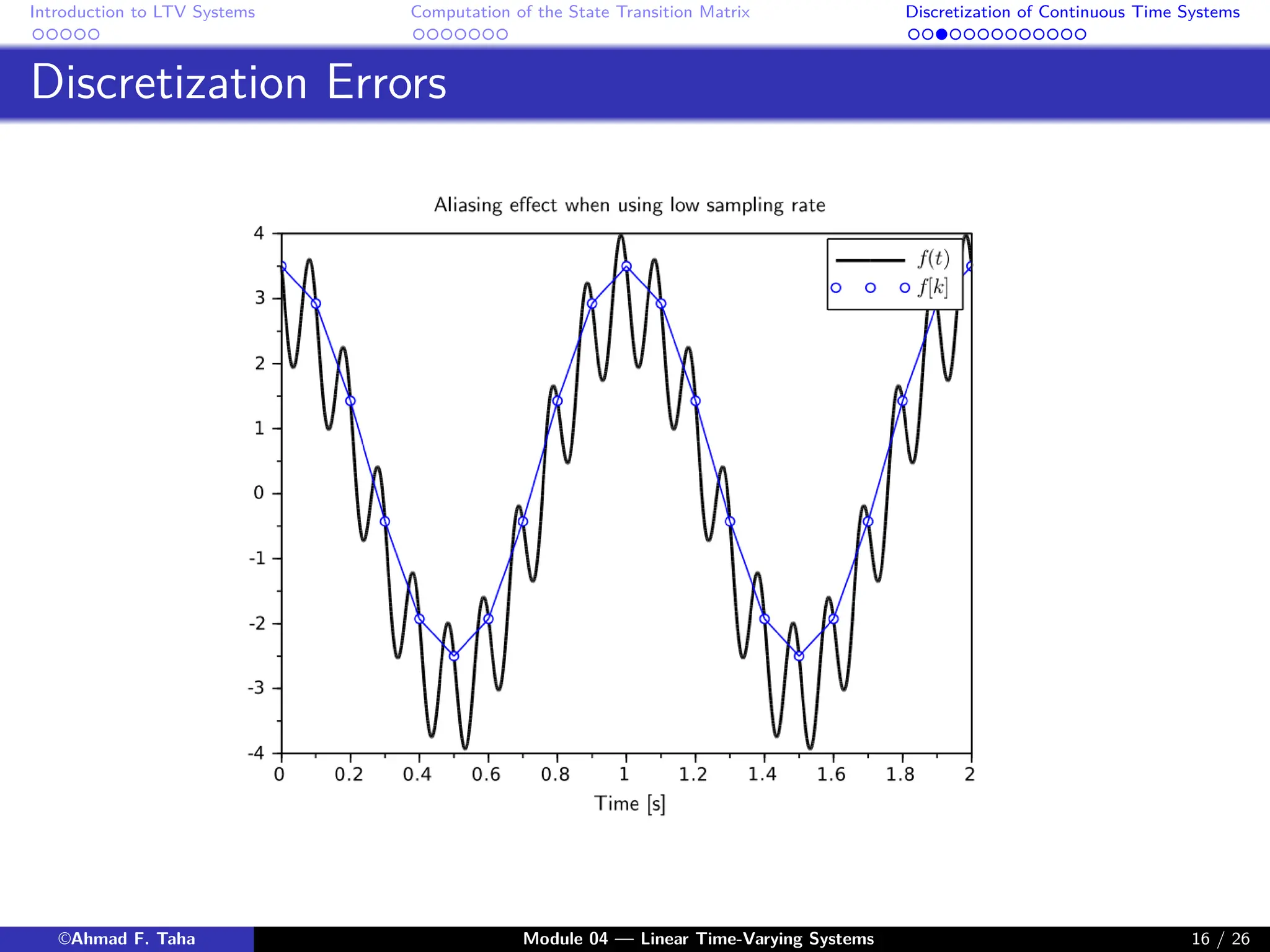
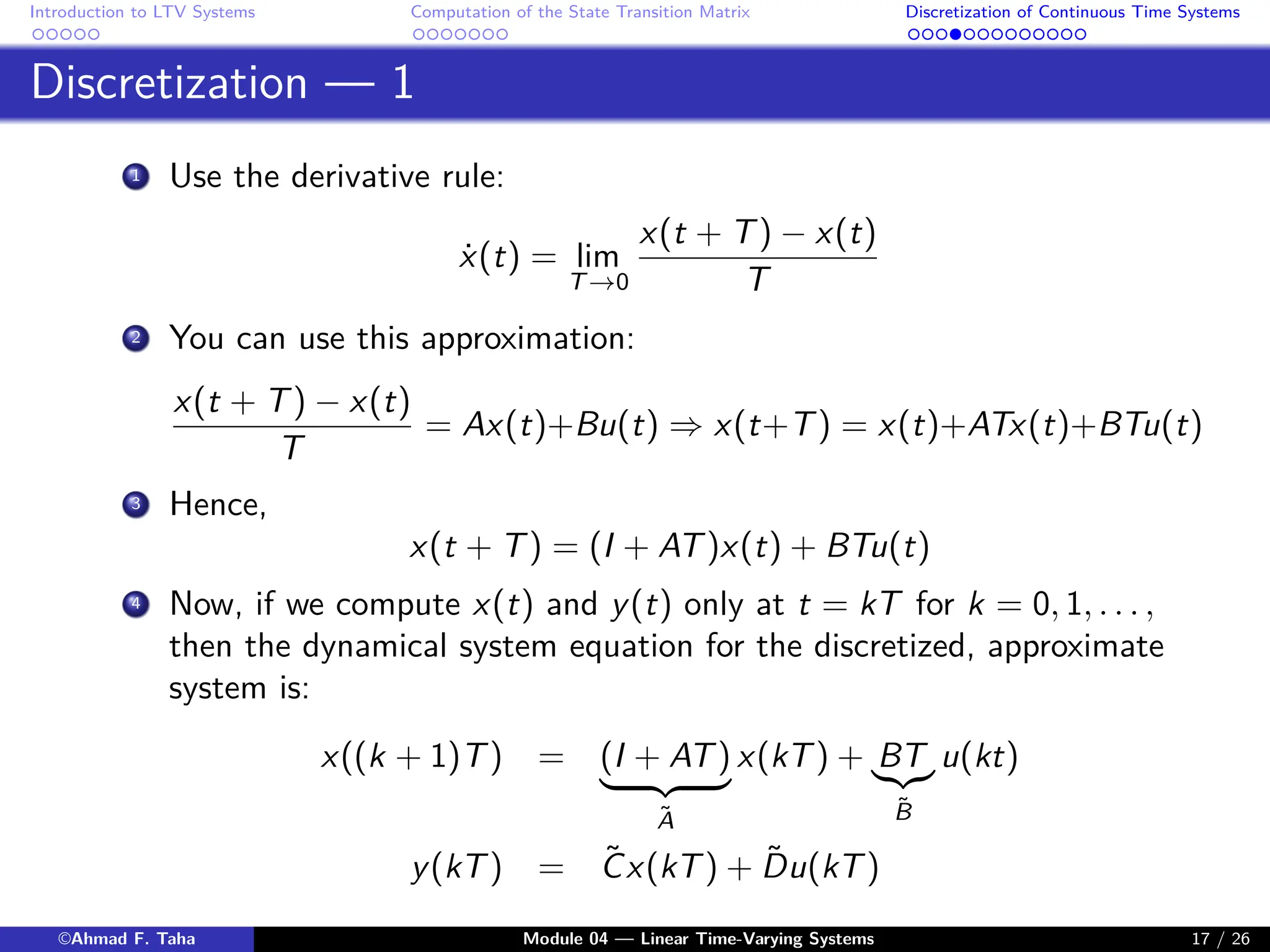
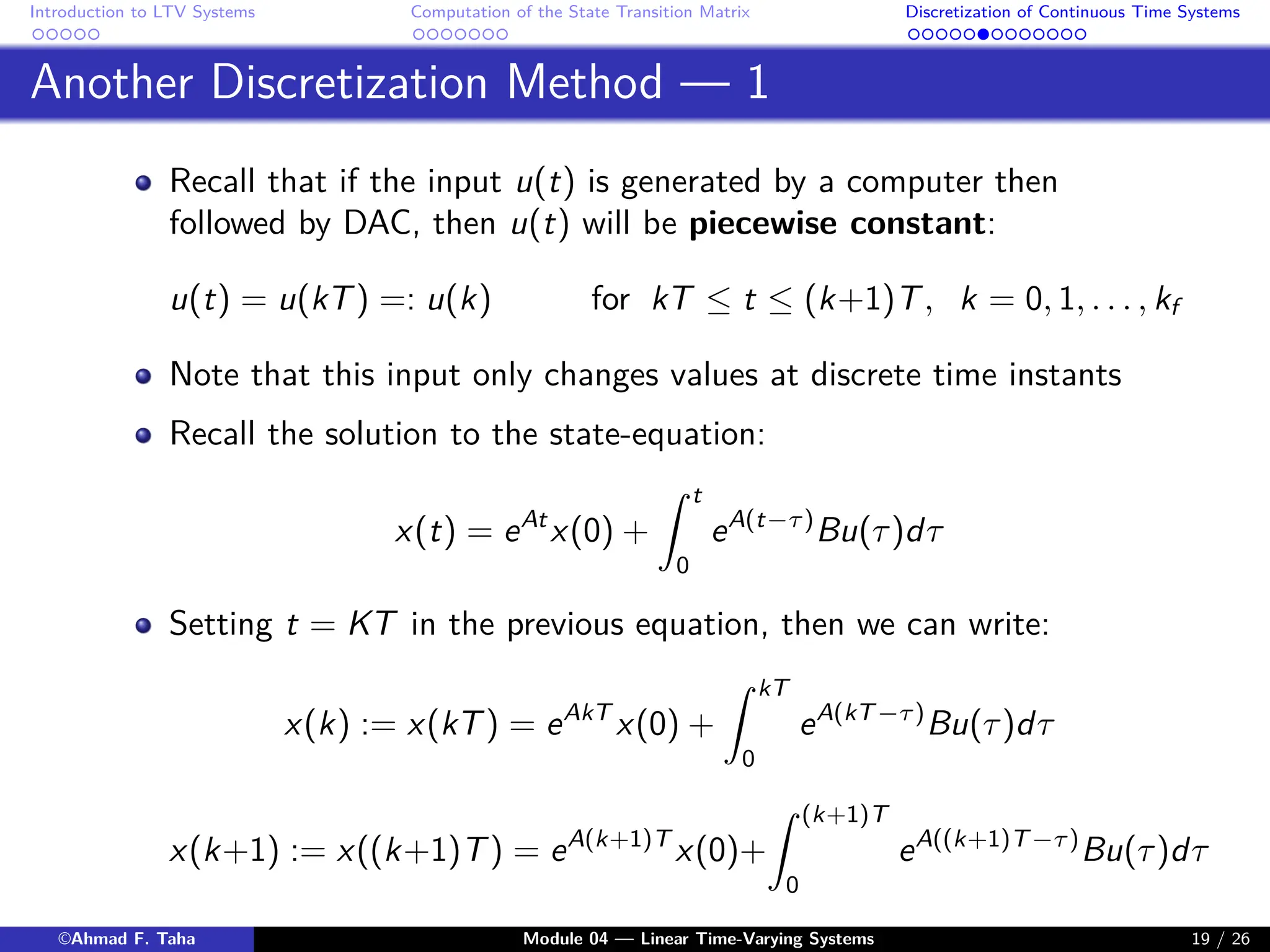
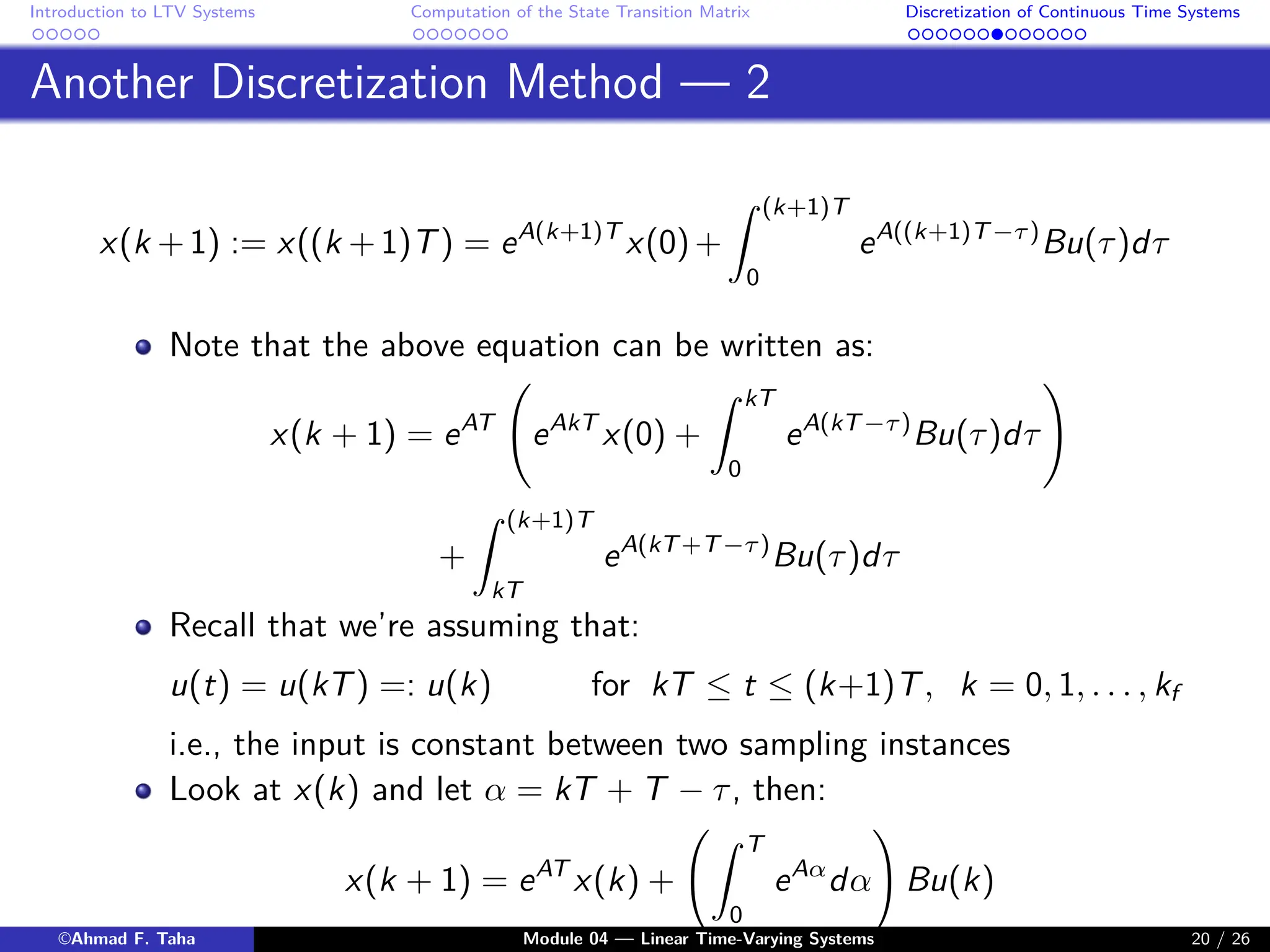
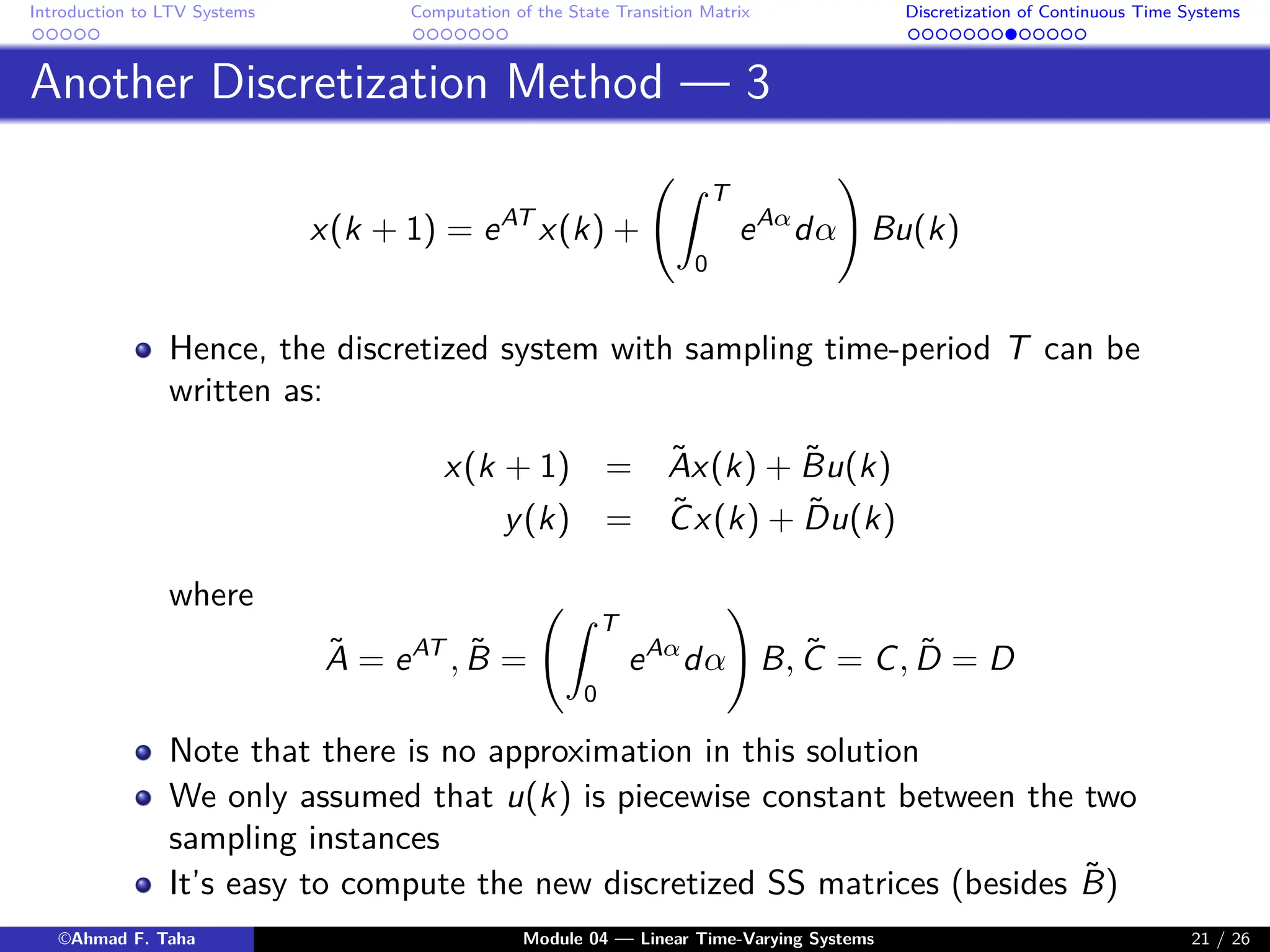
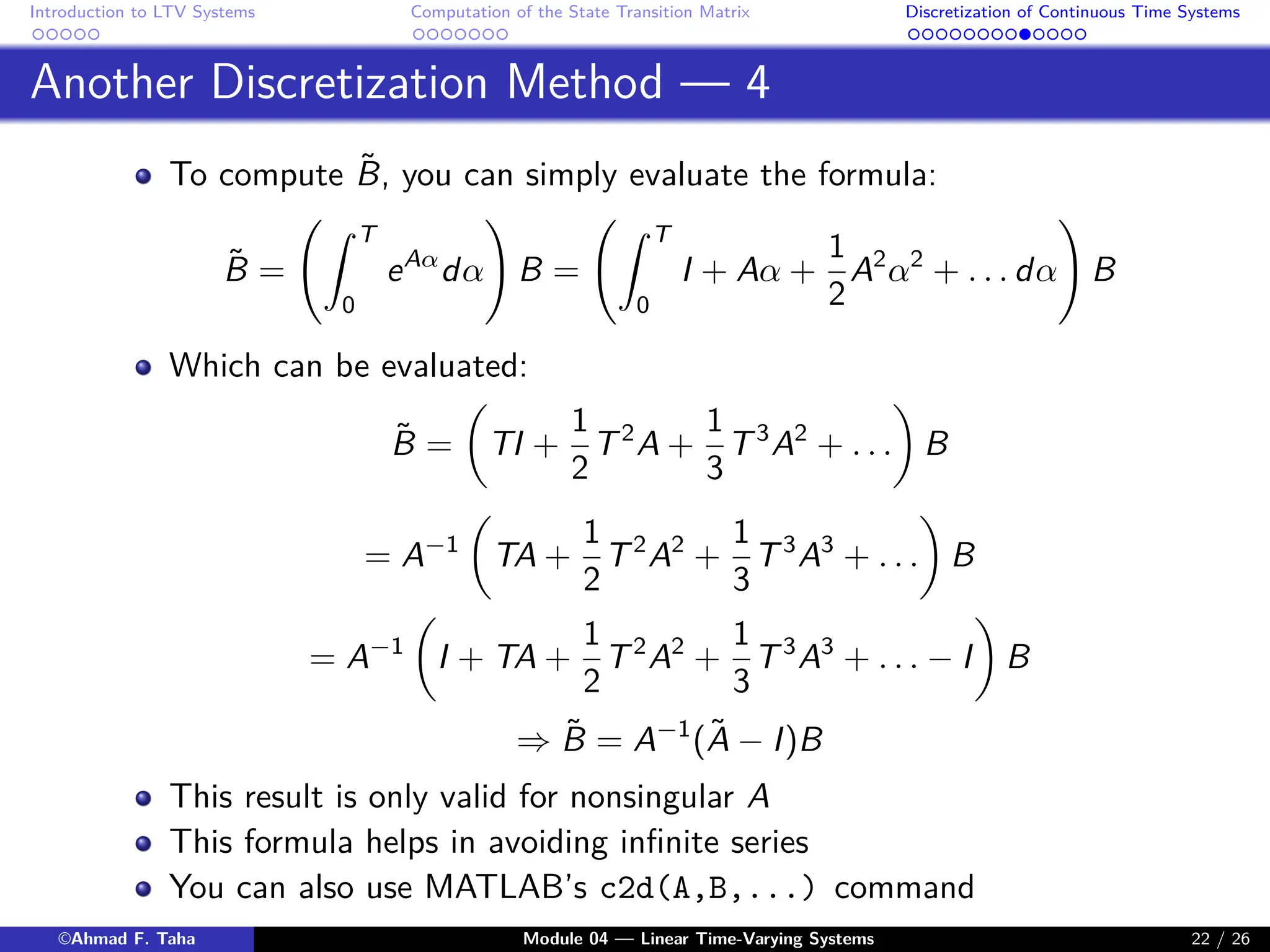
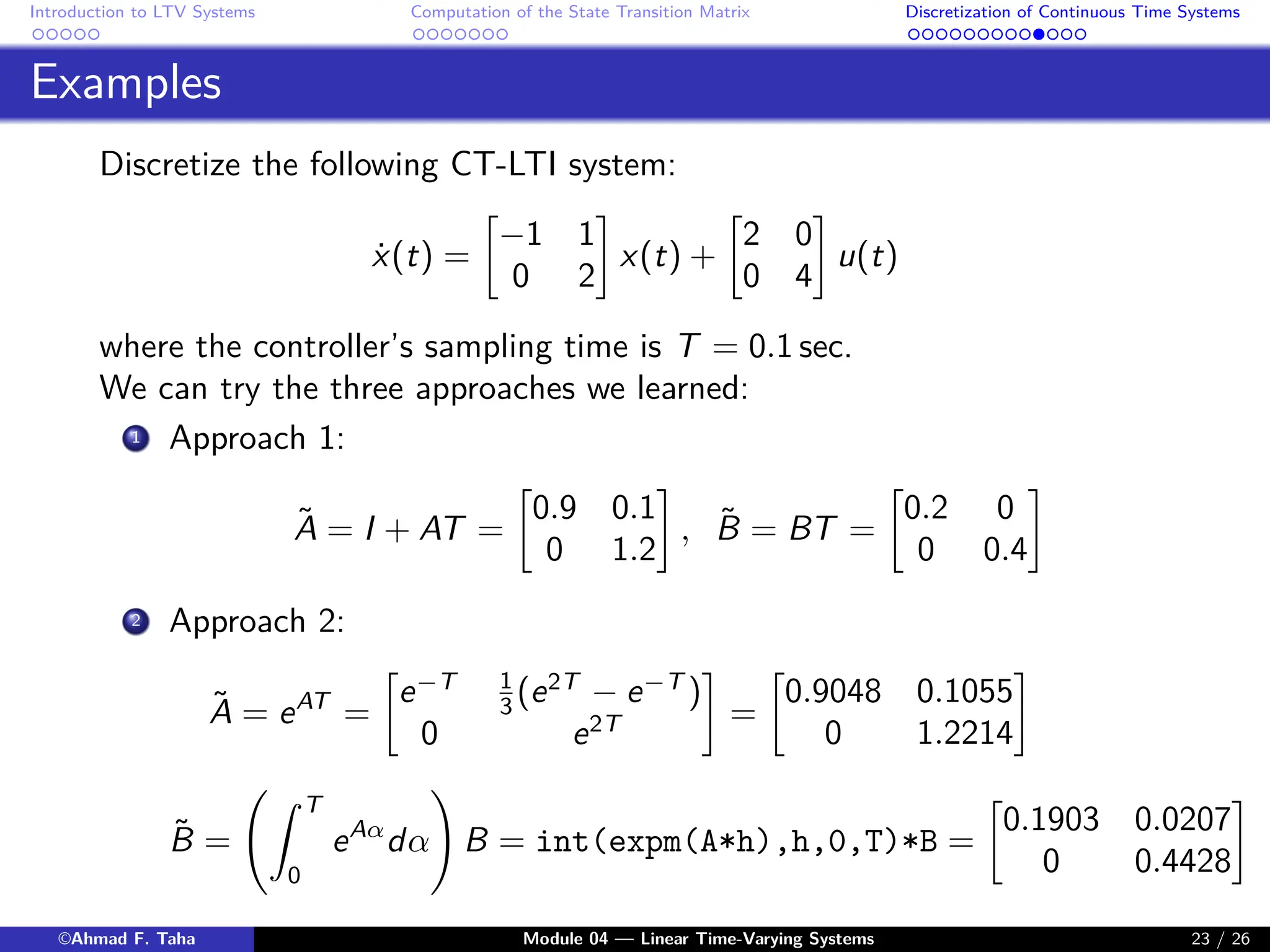
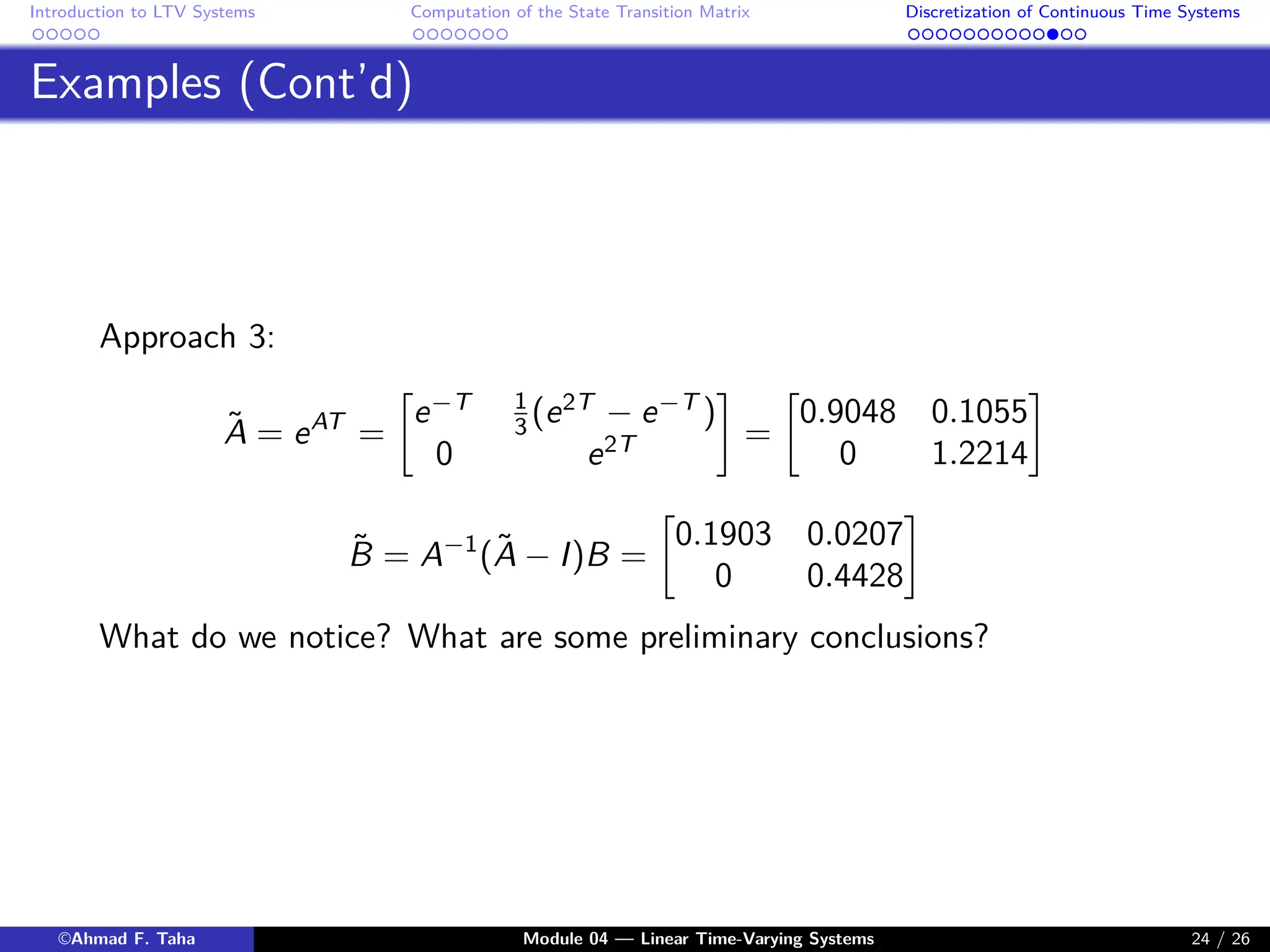
5) An introduction to discretizing continuous-time systems.