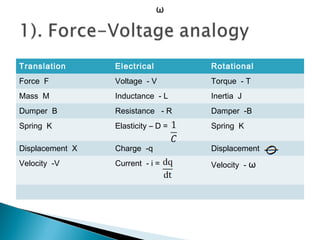
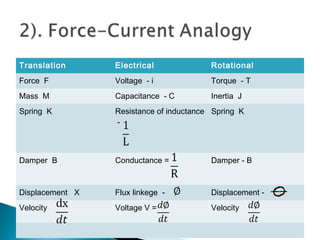
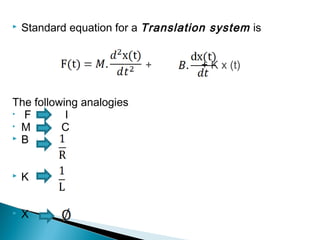
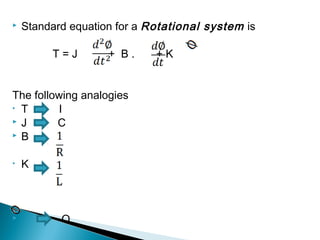
The document describes transfer functions and their role in mathematical modeling for control systems, highlighting the relationship between input and output through poles and zeros. It outlines the advantages and disadvantages of transfer functions, emphasizing their application in linear time-invariant systems and limitations with initial conditions. Additionally, it discusses analogies between mechanical and electrical systems, showcasing similarities in their equations and behavior.
![• In case of a spring , we require force to deform the
spring.
• Here the force is proportional to the displacement.
• Net displacement on application of force f(t) at and X1
and X2
F(t) = K [ X1(t) - X2(t)]](https://image.slidesharecdn.com/transferfunctionandmathematicalmodeling-160723080558/85/Transfer-function-and-mathematical-modeling-16-320.jpg)