Downloaded 48 times
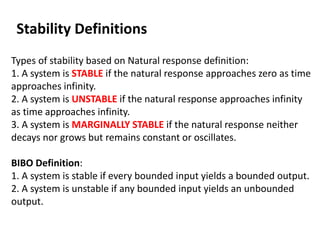
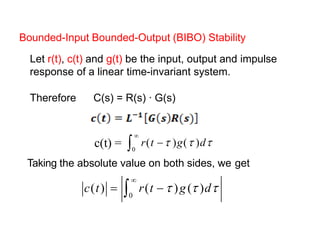
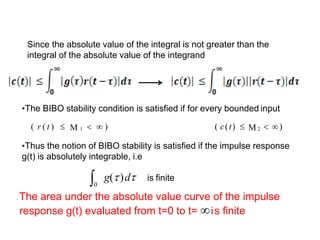
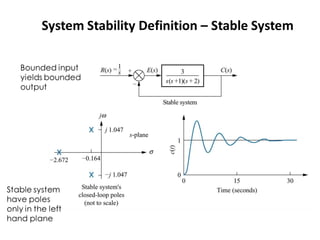
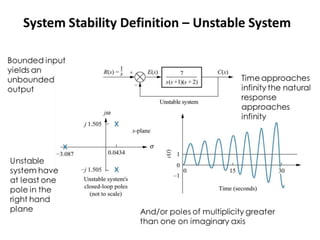
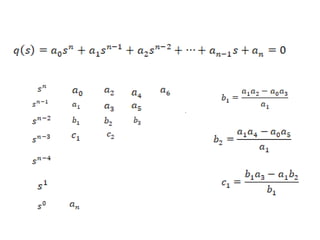
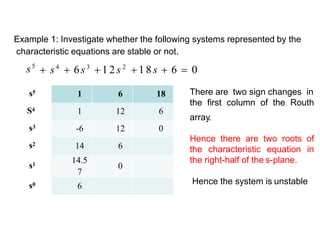
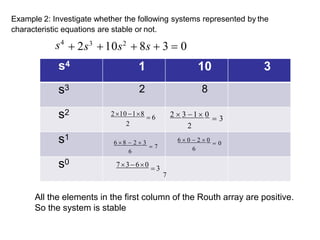
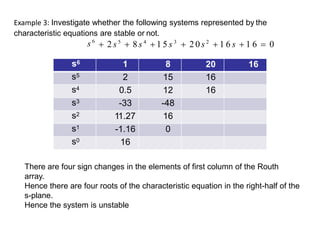
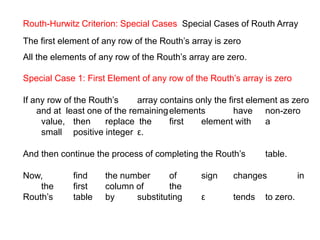
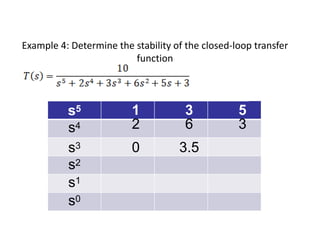
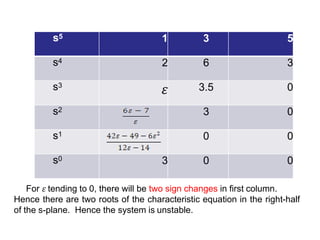
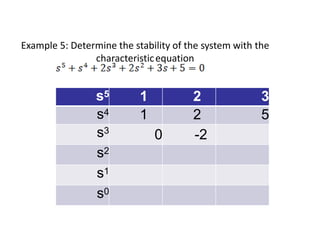
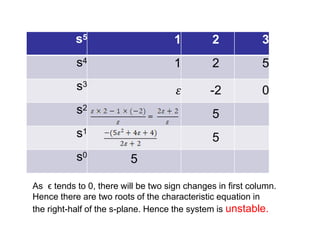
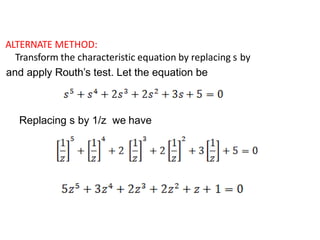
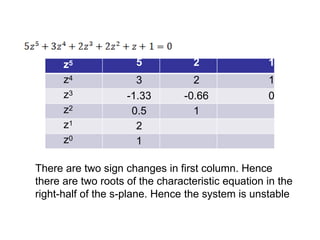
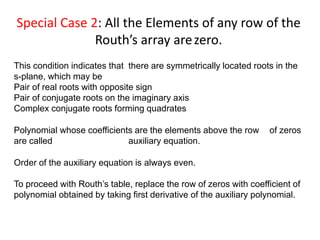
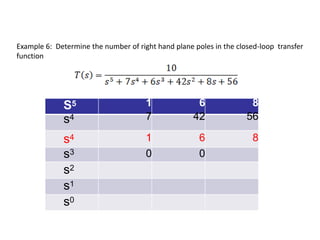
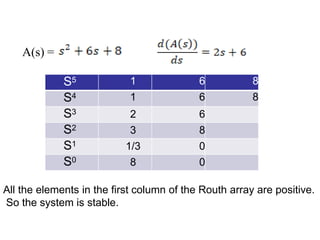
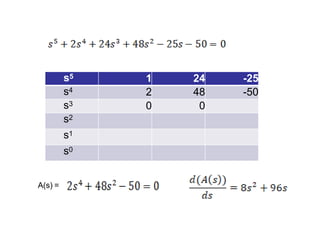
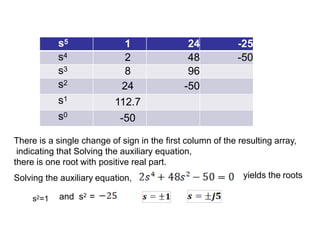
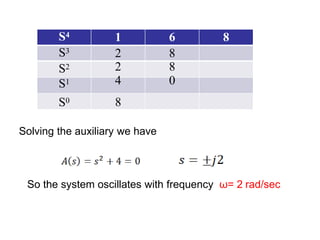
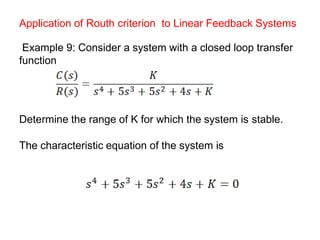
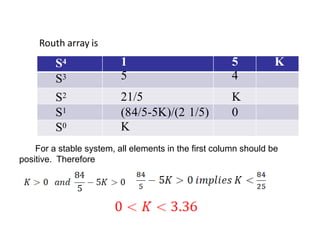
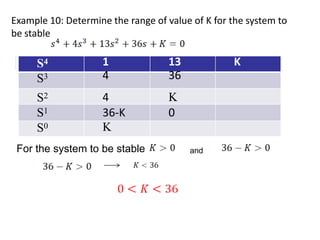


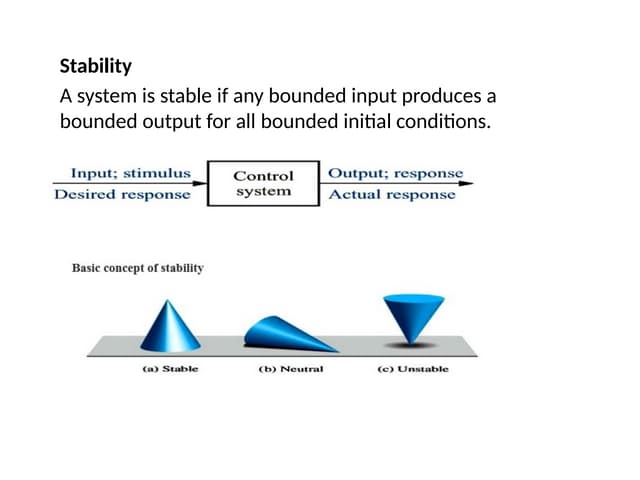
The document discusses control system stability, focusing on definitions and types of stability based on natural response and bounded-input bounded-output (BIBO) criteria. It explains the Routh-Hurwitz stability criterion, how to formulate the Routh array, and includes examples to determine system stability through characteristic equations. Additionally, it outlines necessary conditions for stability and special cases encountered in Routh's method.







































![Roth_herwitz_stability_criterion-[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rothherwitzstabilitycriterion1-251026051926-6a7e967e-thumbnail.jpg?width=640&height=640&fit=bounds)