Downloaded 989 times


![Damped Oscillation
June 16, 2015 14University of Jordan, Department of Mechatronics Engineering, 2014
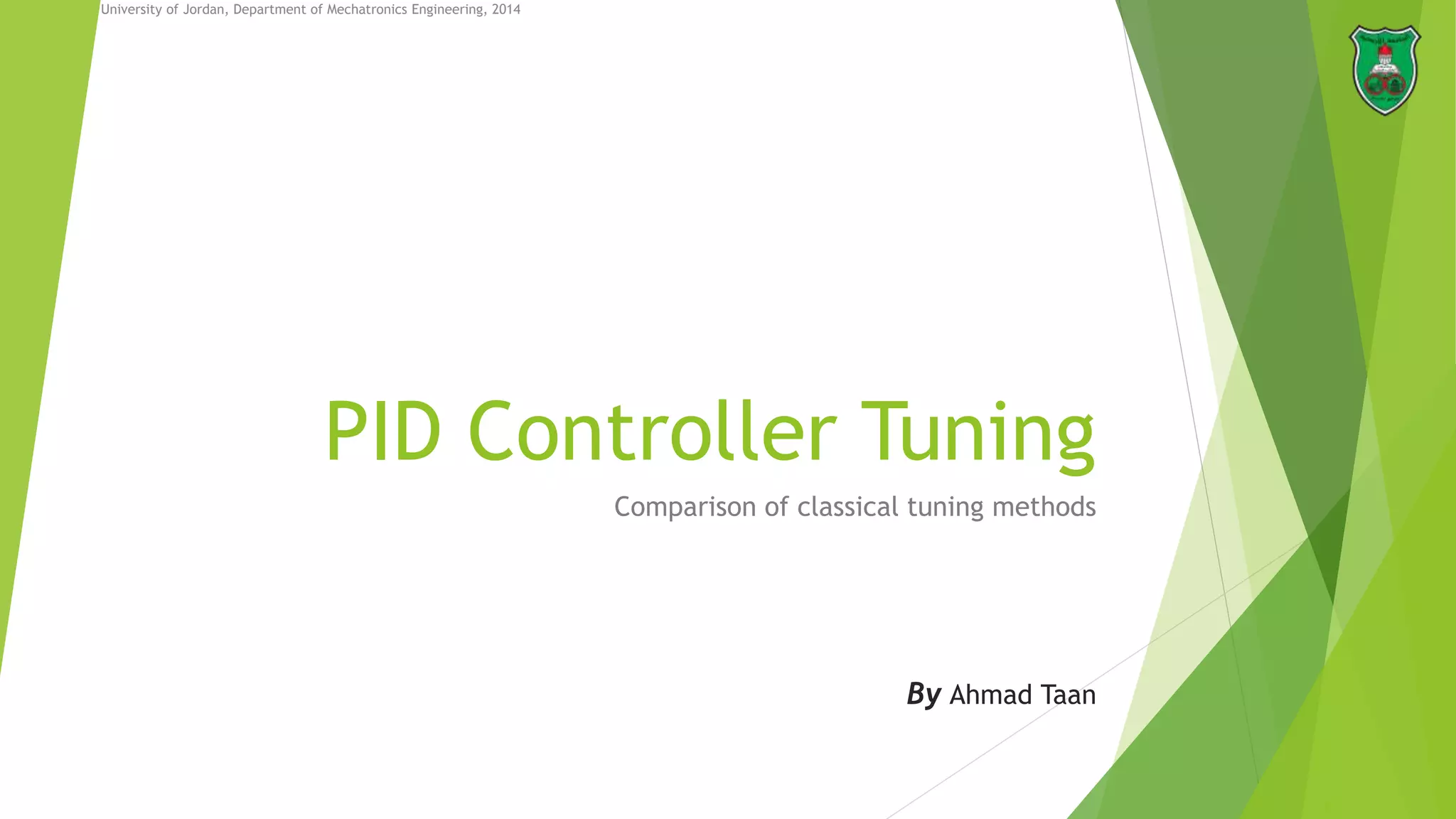
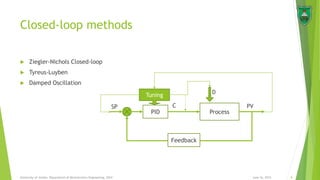
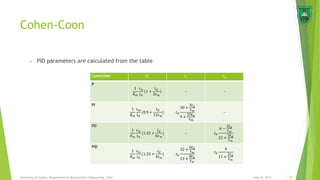
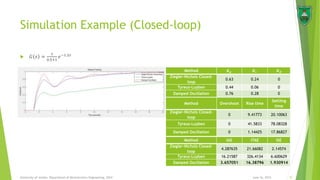
Controller 𝐾𝑐 𝜏𝑖 𝜏 𝑑
PI 𝑎𝑑𝑗𝑢𝑠𝑡𝑒𝑑 𝑃𝑑/6 -
PID 𝑎𝑑𝑗𝑢𝑠𝑡𝑒𝑑 𝑃𝑑/6 𝑃𝑑/1.5
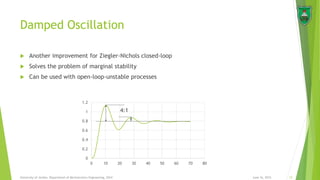
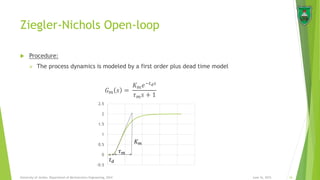
Procedure:[1]
Set 𝐾𝑖 and 𝐾 𝑑 to 0
Increase 𝐾 𝑝 till ¼ damping ratio is maintained and find 𝑃𝑑 only
Use the correlations in the table below to find 𝜏𝑖 and 𝜏 𝑑
Adjust 𝐾 𝑝 till ¼ damping ratio is maintained again
[1] Lipták, Béla G., and Kriszta Venczel. Instrument Engineers' Handbook: Process Control 4thed, Volume Two.](https://image.slidesharecdn.com/a832d275-35a9-48fa-8f76-2b854db40d30-150616152115-lva1-app6892/85/PID-Controller-Tuning-14-320.jpg)


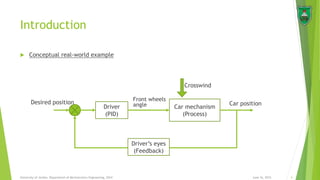
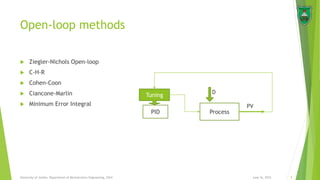
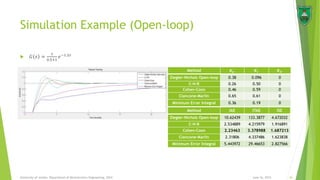
![Cohen-Coon
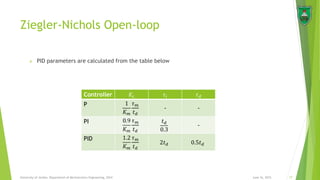
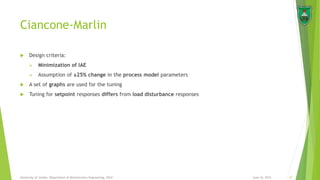
Procedure:[1]
The process reaction curve is obtained by an open loop test and the FOPDT
model is estimated as follows:
𝜏 𝑚 =
3
2
𝑡2 − 𝑡1
𝑡 𝑑 = 𝑡2 − 𝜏 𝑚
June 16, 2015 21University of Jordan, Department of Mechatronics Engineering, 2014
-0.5
0
0.5
1
1.5
2
2.5
[1] Smith,C.A., A.B. Copripio; “Principles and Practice of Automatic Process Control”, John Wiley & Sons,1985](https://image.slidesharecdn.com/a832d275-35a9-48fa-8f76-2b854db40d30-150616152115-lva1-app6892/85/PID-Controller-Tuning-21-320.jpg)

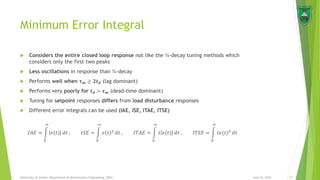

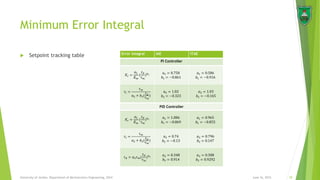
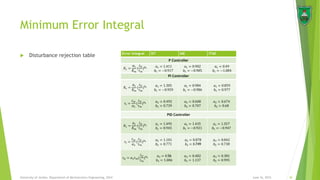
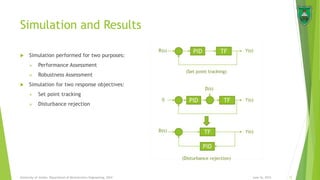


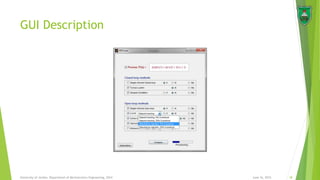
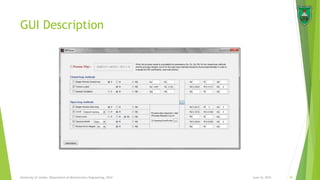
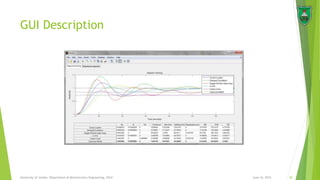
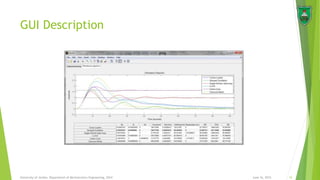

This document compares several classical tuning methods for PID controllers, including both closed-loop and open-loop approaches. It describes the Ziegler-Nichols, Tyreus-Luyben, Damped Oscillation, C-H-R, Cohen-Coon, Ciancone-Marlin, and Minimum Error Integral tuning methods. The document aims to compare the performance and robustness of these tuning methods through simulation of first, second, and third-order processes. It also describes developing a GUI to automatically compare the tuning methods for a given process model.















































